- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Асинхронная машина. 12 страница
В этом выражении  и
и  имеют свои размерности.
имеют свои размерности.
Уравнение электрического равновесия напряжений обмотки возбуждения синхронного генератора запишем в соответствии с (401) и (413) простейшая передаточная функция СМ.

Разрешив его относительно  , получим
, получим
 (419)
(419)
Для неявнополюсной синхронной машины
 и уравнение (419) принимает вид
и уравнение (419) принимает вид
 (420)
(420)
Подставив последнее уравнение в выражение для  и приняв
и приняв
 о.е., имеем
о.е., имеем
 или
или
 (421) где
(421) где  (422)
(422)
Таким образом, напряжение неявнополюсного синхронного генератора является функцией напряжения на обмотке возбуждения, тока нагрузки и его производной. Передаточную функцию СГ запишем в виде передаточной функции типовой системы автоматического регулирования

Здесь  - управляющее воздействие, в нашем случае напряжение на обмотке возбуждения,
- управляющее воздействие, в нашем случае напряжение на обмотке возбуждения,  .
.
Передаточная функция цепи регулирования,  , зависит от выбранного способа и закона регулирования.
, зависит от выбранного способа и закона регулирования.
Передаточная функция объекта регулирования по регулирующему воздействию
 (423) и, наконец, передаточная функция объекта регулирования по возмущающему воздействию
(423) и, наконец, передаточная функция объекта регулирования по возмущающему воздействию  или в вариациях
или в вариациях  имеет вид
имеет вид
 (424)
(424)
Это приводит к следующей структурной схеме СГ как объекта регулирования напряжения
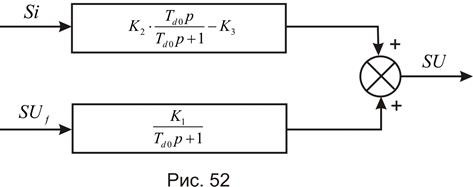
Коэффициенты усиления  и
и  представлены системой выражений (422).
представлены системой выражений (422).
Явнополюсная синхронная машина. Передаточную функцию и структурную схему явнополюсной синхронной машины получим из того же исходного уравнения (418) для  и (419) для
и (419) для  , считая что начальное напряжение в о.е.,
, считая что начальное напряжение в о.е.,
 , а именно:
, а именно:
 (425)
(425)
Но 
Следовательно, с учетом последнего равенства, вариация  примет вид:
примет вид:
 (426)
(426)
Подстановка (426) в (425) дает искомую передаточную функцию в виде
 (427)
(427)
Или
 (428)
(428)
Где
 (429)
(429)
Формально, если сравнивать выражения (421) и (428), передаточные функции и структурные схемы неявнополюсной и явнополюсной синхронных машин структурно одинаковы. Отличие заключается в коэффициенте усиления  . Из выражения (429) следует, что отрицательная связь между током и напряжением у явнополюсной машины более существенна.
. Из выражения (429) следует, что отрицательная связь между током и напряжением у явнополюсной машины более существенна.
Введение уравнений регулирования скорости
первичного двигателя в уравнении моментов генераторного агрегата.
В соответствии с принципом Д`Аламбера, любую динамическую систему можно рассматривать как статическую, если ко всем силам и моментам, действующим в системе, прибавить силы и моменты инерции. Рассматривая генераторный агрегат как единую систему, запишем для него уравнение моментов динамического равновесия
 (430) где
(430) где  - момент динамический, определяемый силами инерции вращающихся масс;
- момент динамический, определяемый силами инерции вращающихся масс;
 - момент электромагнитный, определяемый нагрузкой;
- момент электромагнитный, определяемый нагрузкой;
 - момент механический на валу первичного двигателя генераторного агрегата.
- момент механический на валу первичного двигателя генераторного агрегата.
В задачах регулирования напряжения механический момент обычно принимается постоянным, а его вариация,  , - равной нулю.
, - равной нулю.
При исследовании режимов, связанных с изменением частоты и активной мощности генераторного агрегата, возникает необходимость учета регулирования момента на валу первичного двигателя.
Механическая мощность, развиваемая первичным двигателем,  , определяется количеством топлива или рабочего тела, подаваемого на двигатель в единицу времени. С другой стороны
, определяется количеством топлива или рабочего тела, подаваемого на двигатель в единицу времени. С другой стороны
 (431) здесь
(431) здесь  - угловая частота вращения двигателя,
- угловая частота вращения двигателя,  ;
;  - частота (скорость) вращения двигателя.
- частота (скорость) вращения двигателя.
Таким образом, при неизменной подаче топлива (рабочего тела), момент обратно пропорционален частоте, а подача топлива определяется положением регулирующего органа (топливная рейка у дизеля, дроссельная заслонка у турбины). Суммируя сказанное, можно утверждать, что механический момент является функцией, по меньшей мере, двух координат, а именно
В этом выражении  - координата, определяющая положение регулирующего органа подачи топлива первичного двигателя.
- координата, определяющая положение регулирующего органа подачи топлива первичного двигателя.
Разложим функцию  в степенной ряд относительно некоторых заданных или выбранных значений переменных.
в степенной ряд относительно некоторых заданных или выбранных значений переменных.
Обозначим: 
 .
.
Из курса математики известно, что ряд Тейлора для функции двух переменных имеет вид:
 (432)
(432)
При решении технических задач вполне достаточно ограничится величинами первого порядка малости. Поэтому для механического момента генераторного агрегата запишем:
 (433)
(433)
Запишем уравнение (433) в относительных единицах (о.е.), приняв в качестве базисных следующие величины:

Здесь  - соответственно базисные значения момента, мощности, угловой частоты, координаты регулирующего органа первичного двигателя;
- соответственно базисные значения момента, мощности, угловой частоты, координаты регулирующего органа первичного двигателя;  - синхронная (начальная) угловая частота вращения;
- синхронная (начальная) угловая частота вращения;  - начальное положение регулирующего органа подачи топлива (рабочего тела) первичного двигателя.
- начальное положение регулирующего органа подачи топлива (рабочего тела) первичного двигателя.
Обозначим:
 - скольжение генераторного агрегата;
- скольжение генераторного агрегата;
 - относительное отклонение координаты регулирующего органа.
- относительное отклонение координаты регулирующего органа.

 - угловая частота вращения генераторного агрегата в о.е., следовательно,
- угловая частота вращения генераторного агрегата в о.е., следовательно,  или
или  .
.
Это значит, что  при
при  , то – есть положительному скольжению соответствует скорость выше синхронной. Также полагаем, что положительному
, то – есть положительному скольжению соответствует скорость выше синхронной. Также полагаем, что положительному  соответствует положительное приращение механического момента на валу генератора и первичного двигателя.
соответствует положительное приращение механического момента на валу генератора и первичного двигателя.
Таким образом, имеем:
 (434)
(434)
Принимая во внимание, что  и
и  , получим
, получим
 (435) здесь
(435) здесь  - механический момент на валу первичного двигателя в о.е.
- механический момент на валу первичного двигателя в о.е.
Все величины входящие в (435) безразмерны, т.е. измеряются в о.е.
Из теории подобия известно, что при выборе базисных величин часть из них может быть выбрана произвольно (основные базисные величины). При этом, какие базисные величины выбираются в качестве основных, а какие в качестве производных, дело вкуса. В соответствии с теорией подобия, число основных базисных величин ограничено числом независимых единиц измерения в используемой системе единиц  и должно быть не более
и должно быть не более  . Международная система единиц СИ, которой пользуются в исследованиях и расчетах электромеханических систем содержит 4 основные независимые единицы измерения: метр, килограмм, секунда, ампер. Это значит, что основных базисных величин может быть не более трех.
. Международная система единиц СИ, которой пользуются в исследованиях и расчетах электромеханических систем содержит 4 основные независимые единицы измерения: метр, килограмм, секунда, ампер. Это значит, что основных базисных величин может быть не более трех.
Считаем  основной и выбираем её таким образом, чтобы обеспечивалось равенство
основной и выбираем её таким образом, чтобы обеспечивалось равенство
 (436)
(436)
С другой стороны, при постоянной скорости подачи топлива на первичный двигатель, двигатель будет развивать постоянную мощность. Это значит
 (437)
(437)
Последнее позволяет записать
 (438)
(438)
Из уравнения (438) вытекает, что параметр  , характеризующий свойство саморегулирования первичного двигателя (его можно также назвать коэффициентом внутренней отрицательной обратной связи первичного двигателя по скорости вращения) находится из выражения
, характеризующий свойство саморегулирования первичного двигателя (его можно также назвать коэффициентом внутренней отрицательной обратной связи первичного двигателя по скорости вращения) находится из выражения
 (439)
(439)
Опустим в дальнейшем индекс  . Уравнение на валу первичного двигателя в функции скольжения и относительного изменения координаты регулирующего органа подачи топлива (рабочего тела для турбин) запишем в виде
. Уравнение на валу первичного двигателя в функции скольжения и относительного изменения координаты регулирующего органа подачи топлива (рабочего тела для турбин) запишем в виде
 (440)
(440)
Уравнение динамического равновесия генераторного агрегата.
Передаточная функция и структурная схема.
Уравнение динамического равновесия вытекает из принципа Д`Аламбера (430)
Разделив все компоненты уравнения (430) на  , получим уравнение в о.е.
, получим уравнение в о.е.
 (441)
(441)
Здесь
Замечание. Все физические переменные, используемые в данном параграфе, имеют размерности в системе СИ.
Таким образом,
 о.е. (442)
о.е. (442)
Здесь  , с – инерционная постоянная времени в секундах;
, с – инерционная постоянная времени в секундах;  - число пар полюсов генератора.
- число пар полюсов генератора.
Обозначим  - в данном случае оператор дифференцирования по времени в секундах. Имеем:
- в данном случае оператор дифференцирования по времени в секундах. Имеем:
 , о.е. (443)
, о.е. (443)
Учитывая тот факт, что  направлен в сторону вращения ротора, а
направлен в сторону вращения ротора, а  является в генераторном режиме тормозящим, т.е. отрицательным, уравнение (441) опуская
является в генераторном режиме тормозящим, т.е. отрицательным, уравнение (441) опуская  , перепишем в виде
, перепишем в виде
 (444)
(444)
Электромагнитный момент  представим в виде
представим в виде
где  - начальное значение электромагнитного момента, соответствующее исходному установившемуся режиму;
- начальное значение электромагнитного момента, соответствующее исходному установившемуся режиму;
 - приращение электромагнитного момента.
- приращение электромагнитного момента.
В исходном установившемся режиме электромагнитный момент полностью уравновешивается механическим моментом
Это обстоятельство позволяет записать уравнение динамического равновесия генераторного агрегата в виде
 (445)
(445)
Или переходя к операторной форме записи, имеем:
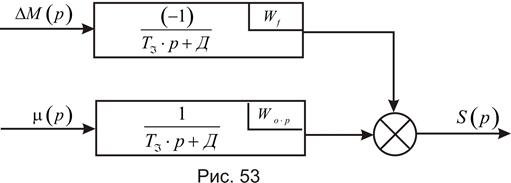
 (446) или
(446) или
 (447)
(447)
Здесь 
- передаточная функция объекта регулирования (генераторного агрегата) по управляющему воздействию,  ;
;
- передаточная функция регулируемого объекта по возмущающему воздействию,  .
.
Структурная схема генераторного агрегата как объекта регулирования скорости (частоты) приведена на рис. 53
Работа генераторов на общую нагрузку.
При анализе работы генераторов на общую нагрузку руководствуемся следующими соображениями: генераторы неявнополюсные, поэтому  ,
,  ;
;  ;
;  ;
;  ,
,  , одновременно обозначим
, одновременно обозначим  ,
,  и
и  .
.
Ограничимся двумя генераторами, так как в статических режимах системы, содержащие более двух генераторов можно свести к двум, а именно: рассматриваемый, а остальные в виде одного эквивалентного.

Рассматриваем симметричные режимы. В этом случае смещение нейтрали в 3-х фазной системе равно нулю, а это значит, что потенциалы нулевых точек и генераторов и нагрузки одинаковы, и поэтому для любой фазы схема замещения сводится к Т – образной, показанной на рис. 54,а. при определении токов используем принцип наложения (суперпозиции). Соответствующие схемы замещения изображены на рисунках.
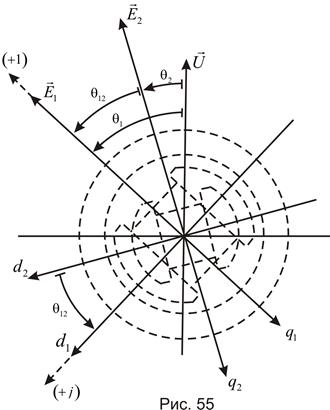
При параллельной работе генераторов напряжение на сборных шинах общее, э.д.с. же могут отличаться как по величине, так и по фазе. Известно, что взаимное положение комплексов, напряжений, токов, э.д.с., потокосцеплений и прочих, изображающих переменные функции времени, на временных векторных диаграммах полностью совпадает со взаимным расположением соответствующих изображающих векторов на пространственных векторных диаграммах. На рис. 55 изображена пространственная векторная диаграмма, соответствующая некоторому произвольному режиму работы генераторов. На рисунке видно, что положение и.в. э.д.с. каждого генератора однозначно определяется положением его ротора, а именно, и.в. э.д.с. генератора направлен в отрицательном направлении поперечной оси  индуктора. Доказывается это достаточно просто.
индуктора. Доказывается это достаточно просто.

В плоскости поперечного сечения синхронной машины, которую рассматриваем как комплексную, совместив ось действительных с осью фазы а, пространственный и.в. потокосцепления взаимоиндукции обмоток фаз статора с магнитным потоком индуктора записывается в виде
 (448)
(448)
И.в. э.д.с.  в неподвижных ортогональных осях находим из выражения
в неподвижных ортогональных осях находим из выражения
 (449)
(449)
То – есть  в пространстве отстает от вектора
в пространстве отстает от вектора  на 900. ввиду того, что и.в. всегда направлен в положительном направлении продольной оси индуктора,
на 900. ввиду того, что и.в. всегда направлен в положительном направлении продольной оси индуктора,  , следовательно,
, следовательно,  направлен в отрицательном направлении поперечной оси,
направлен в отрицательном направлении поперечной оси,  . Что и следовало доказать.
. Что и следовало доказать.
Найдем токи  и
и  из схем замещения, пользуясь принципом суперпозиции
из схем замещения, пользуясь принципом суперпозиции
 где
где
 и
и  -входные сопротивления схем замещения соответственно 54, б и 54,в по отношению к э.д.с.
-входные сопротивления схем замещения соответственно 54, б и 54,в по отношению к э.д.с.  и
и  .
.
 ;
; 
 ;
; 
Сопротивления  и
и  называют взаимными.
называют взаимными.
В соответствии с принципом взаимности  . Величину взаимного сопротивления
. Величину взаимного сопротивления  находим из схемы замещения рис. 54,б.
находим из схемы замещения рис. 54,б.
 ;
; 

То – есть 
Окончательно для токов  и
и  имеем
имеем
 ;
; 
Электромагнитные мощности генераторов находим по формулам
 (450)
(450)
 (451) где
(451) где  и
и  комплексы сопряженные
комплексы сопряженные  и
и  .
.
Действительная часть комплекса  дает активную мощность генератора первого, а мнимая часть, взятая с обратным знаком равна реактивной мощности того же генератора. Аналогично и для второго генератора.
дает активную мощность генератора первого, а мнимая часть, взятая с обратным знаком равна реактивной мощности того же генератора. Аналогично и для второго генератора.
Для того, чтобы найти мощности генераторов в функции угла рассогласования векторов их э.д.с.,  , необходимо задаться положением векторов э.д.с. в произвольно выбранной системе координат комплексной плоскости. Пусть ось действительных совпадает с комплексом э.д.с.
, необходимо задаться положением векторов э.д.с. в произвольно выбранной системе координат комплексной плоскости. Пусть ось действительных совпадает с комплексом э.д.с.  (и.в.
(и.в.  на рис. 55)
на рис. 55)
Тогда
 ;
;  ;
;
 ;
; 
Кажущиеся мощности:
Комплексы собственных и взаимного сопротивлений представим в форме
 , где
, где

 - угол, дополняющий
- угол, дополняющий  до 900
до 900
 ;
; 


Подставив комплексы э.д.с. и сопротивлений в выражения комплексов мощности, получим:


Выделим в полученных выражениях действительную и мнимую составляющие, используя формулу Эйлера

 и синус – косинусные преобразования, а именно:
и синус – косинусные преобразования, а именно:
Это дает для активных и реактивных мощностей
 (452)
(452)
Принимая во внимание, что угол  , мощность
, мощность  иногда записывают в виде
иногда записывают в виде

Реактивные мощности развиваемые генераторами будут
 (453)
(453)
Из уравнений (452) и (453) для активных и реактивных мощностей достаточно просто получить зависимости для токов  и
и  от угла
от угла  . Действительно, в координатах каждого из генераторов можно записать
. Действительно, в координатах каждого из генераторов можно записать
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|