- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Асинхронная машина. 6 страница
Поскольку величина и взаимное расположение изображающих векторов от того, в каких осях они записаны, их векторное произведение не зависит от выбора осей, т.е.
 (192)
(192)
Характерной особенностью полученных выражений для электромагнитного момента асинхронной машины является то, что в них фигурируют и.в.  и
и  , принадлежащие исключительно обмотке статора машины. Обмотка ротора как-бы проигнорирована. Безусловно это не верно, т.к.
, принадлежащие исключительно обмотке статора машины. Обмотка ротора как-бы проигнорирована. Безусловно это не верно, т.к.  . В том, что токи обмотки ротора участвуют в формировании электромагнитного момента, легко убедиться, выразив
. В том, что токи обмотки ротора участвуют в формировании электромагнитного момента, легко убедиться, выразив  с помощью уравнений связи.
с помощью уравнений связи.
Синхронная машина. Выражение электромагнитного момента синхронной машины находится аналогично
Энергию магнитного поля синхронной машины находим как энергию поля фазных обмоток статора, обмотки возбуждения и успокоительных контуров по продольной и поперечной осям.
 (193)
(193)
Преобразуем уравнение (193), используя обратное преобразование Парка-Горева в осях d, q, а также выразив потокосцепления через токи и реактивности.
 (194)
(194)
Как следует из (194)

Однако от угла поворота ротора зависят только  и
и  . Ввиду того, что обмотки возбуждения и успокоительные контуры располагаются непосредственно на роторе, аналитические выражения токов в них при записи в осях d, q (ротора) от положения осей не зависят. Таким образом
. Ввиду того, что обмотки возбуждения и успокоительные контуры располагаются непосредственно на роторе, аналитические выражения токов в них при записи в осях d, q (ротора) от положения осей не зависят. Таким образом
 (195)
(195)
Мы уже установили, что



Учитывая, что  а
а 
 выражение для частной производной
выражение для частной производной  запишем в виде
запишем в виде

 (196)
(196)
В результате имеем
 (197)
(197)
В частности для машин без успокоительных контуров

Известно, что  - э.д.с., которая индуцируется в обмотке статора током возбуждения; в генераторном режиме
- э.д.с., которая индуцируется в обмотке статора током возбуждения; в генераторном режиме  и
и  , то-есть
, то-есть

 - э.д.с. синхронной машины за поперечной реактивностью, а это значит, что
- э.д.с. синхронной машины за поперечной реактивностью, а это значит, что
 (198)
(198)
Учитывая знак , видно что в генераторном режиме
Электромагнитный момент синхронной машины в генераторном режиме направлен против направления вращения ротора, является тормозящим, моментом нагрузки для первичного двигателя.
Уравнения элементов электроэнергетической системы
в относительных величинах.
Как правило, расчеты и моделирование процессов в электроэнергетических системах осуществляются по уравнениям, записанным в относительных единицах (о.е.). Использование о.е. имеет ряд достоинств: в частности, появляется возможность получить определенные безразмерные критерии, использовать в расчетах номограммы, а также более рельефно выделить особенности того или иного элемента энергетической системы.
Система базисных величин.
При выборе базисных величин опираемся на основные положения теории подобия. В качестве основных принимаем:
 - амплитуда номинального фазного напряжения статорной обмотки;
- амплитуда номинального фазного напряжения статорной обмотки;
 - амплитуда номинального фазного тока статорной обмотки;
- амплитуда номинального фазного тока статорной обмотки;
 - синхронная угловая частота.
- синхронная угловая частота.
Производные:
 - потокосцепление цепей обмотки статора;
- потокосцепление цепей обмотки статора;
 - сопротивление цепей статора;
- сопротивление цепей статора;
 - полная (трехфазная) мощность;
- полная (трехфазная) мощность;
 - вращающий момент, соответствующий активной мощности
- вращающий момент, соответствующий активной мощности  при синхронной (базисной) угловой частоте.
при синхронной (базисной) угловой частоте.
В качестве базисных токов в контурах, расположенных по продольной оси ротора, принимаем ток, который при холостом ходе машины индуктирует базисное напряжение на зажимах фазной обмотки статора, то-есть
 - базисный ток обмотки возбуждения;
- базисный ток обмотки возбуждения;
 - базисный ток успокоительной обмотки по продольной оси ротора.
- базисный ток успокоительной обмотки по продольной оси ротора.
Базисный ток успокоительной обмотки по поперечной оси ротора определяется аналогично:
По базисным токам находим базисные напряжения, сопротивления и потокосцепления соответствующих контуров:
 - базисное напряжение обмотки возбуждения;
- базисное напряжение обмотки возбуждения;
 - базовое потокосцепление обмотки возбуждения в
- базовое потокосцепление обмотки возбуждения в  ;
;
В принятой в данном курсе системе единиц измерения время безразмерно, а потокосцепление измеряется в вольтах, поэтому
 - базисное сопротивление обмотки возбуждения
- базисное сопротивление обмотки возбуждения
 - базисное напряжение успокоительной обмотки по продольной оси ротора;
- базисное напряжение успокоительной обмотки по продольной оси ротора;
 - базисное потокосцепление этой обмотки;
- базисное потокосцепление этой обмотки;
 - её базисное сопротивление;
- её базисное сопротивление;
 - базисное напряжение успокоительной обмотки по поперечной оси ротора;
- базисное напряжение успокоительной обмотки по поперечной оси ротора;
 - её базисное потокосцепление;
- её базисное потокосцепление;
 - её базисное сопротивление.
- её базисное сопротивление.
Уравнения синхронной машины в переменных
i и e, записанные в о.е.
В качестве исходной используем систему уравнений электрического и механического состояний синхронной машины в наиболее общей форме. Уравнения записываем в осях d и q, жестко связанных с ротором машины. Пространственная векторная диаграмма и.в. токов, напряжений и потокосцеплений представлена на рис.27 о.е.
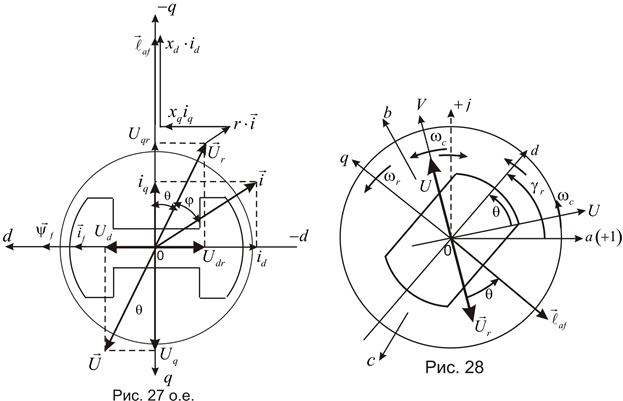
В соответствии с принятым положительным направлением осей d и q уравнения синхронной машины в размерных единицах имеют вид:
 (199)
(199)
Перейдем к системе в переменных i и e, дополнив уравнения (199) уравнениями связи, а именно:
 (200)
(200)
Суммы в уравнениях связи алгебраические. Токи, входящие в эти выражения, необходимо брать с их знаками, которые определяются положением токов или их компонент относительно осей d и q, в соответствии с принятым положительным направлением последних.
 - механический момент на валу генератора от первичного двигателя;
- механический момент на валу генератора от первичного двигателя;
 - динамический (инерционный) момент движущихся масс генераторного агрегата;
- динамический (инерционный) момент движущихся масс генераторного агрегата;
 - электромагнитный момент генератора;
- электромагнитный момент генератора;
 - оператор дифференцирования по синхронному времени
- оператор дифференцирования по синхронному времени

Найдем связь между углом  и скольжением ротора генератора S. С этой целью рассмотрим следующие координатные оси (рис. 29). Здесь
и скольжением ротора генератора S. С этой целью рассмотрим следующие координатные оси (рис. 29). Здесь

a – неподвижная ось фазы обмотки статора синхронного генератора;
U,V – система ортогональных осей, вращающихся с синхронной скоростью  ; с этими осями связано положение и.в. напряжений сети
; с этими осями связано положение и.в. напряжений сети  ;
;
d,q – система ортогональных осей, жестко связанных с ротором синхронного генератора и вращающихся с угловой частотой вращения ротора ;
При измерении времени в синхронных секундах или радианах угловые частоты – величины безразмерные. Обозначим скольжение ротора синхронного генератора как
 (201)
(201)
где  - производная от угла поворота ротора генератора по синхронному времени;
- производная от угла поворота ротора генератора по синхронному времени;
 - угол между неподвижной осью a и осью U, вращающейся синхронно;
- угол между неподвижной осью a и осью U, вращающейся синхронно;
 - угол между неподвижной осью a и осью d, закрепленной на роторе машины.
- угол между неподвижной осью a и осью d, закрепленной на роторе машины.
Отсюда следует, что
 (202)
(202)
Сравнивая (201) с (202), находим

или 
Перепишем систему (199), используя уравнения связи (200), а также выражения для моментов динамического и электромагнитного (для машины без успокоительных обмоток на роторе)
 (204)
(204)
Разделим первые два уравнения на базисное напряжение цепей статора
 (205)
(205)
Третье уравнение – на базисное напряжение цепи возбуждения
 (206)
(206)
а четвертое системы (204) на базисный момент
 (207)
(207)
В принятой системе единиц, когда время является безразмерной величиной, измеряется в радианах, рад. или синхронных секундах, с-с, базисный момент имеет размерность мощности, Ватт или вольт*ампер. Соответственно, постоянные времени – величины безразмерные. Легко показать справедливость выражения
 (208)
(208)
Действительно, сравним размерности:

или 
Замечательным свойством уравнения (208) является то, что инерционная постоянная  и базисный момент
и базисный момент  , входящие в его правую часть измеряются соответственно в радианах и в Ваттах, то-есть
, входящие в его правую часть измеряются соответственно в радианах и в Ваттах, то-есть

В результате деления уравнений системы (204) на базисные величины получаем систему уравнений синхронной машины в относительных единицах (о.е.). Параметры машины в о.е., а также её переменные координаты будем обозначать теми же, но прописными буквами и символами. Таким образом, имеем:
для цепей статора
При записи уравнения для обмотки возбуждения обозначим
 (о.е.),
(о.е.),
а также примем во внимание, что
Разделим все компоненты уравнения цепи возбуждения на 

Это дает

Компоненты уравнения моментов делим на  и получаем
и получаем
 (209)
(209)
Объединим полученные уравнения в систему
 (210)
(210)
Легко убедиться, что в о.е. ток возбуждения  равен полной э.д.с., индуцируемой в обмотке статора, т.е.
равен полной э.д.с., индуцируемой в обмотке статора, т.е.
 , о.е.
, о.е.
Действительно, в режиме холостого хода возбужденного синхронного генератора его э.д.с. равна напряжению на его зажимах. При этом 
Из второго уравнения системы (210) имеем
 .
.
Кроме того  - э.д.с. за поперечной реактивностью синхронной машины
- э.д.с. за поперечной реактивностью синхронной машины  .
.
Перепишем систему (210) с учетом сделанных замечаний
 (211)
(211)
Связь между потокосцеплением обмотки возбуждения и э.д.с. за переходной реактивностью,  . В о.е. имеем:
. В о.е. имеем:
С учетом отрицательности  . Таким образом, в о.е.
. Таким образом, в о.е.
 (212)
(212)
Определение инерционной постоянной времени
вращающихся (и приведенных к ним) масс
генераторного агрегата.
Обозначим  - момент инерции маховых масс агрегата
- момент инерции маховых масс агрегата
 .
.
В качестве инерционной постоянной времени,  принимают время, за которое под действием базисного момента вращающиеся массы изменяют угловую частоту вращения от нуля до базисной величины,
принимают время, за которое под действием базисного момента вращающиеся массы изменяют угловую частоту вращения от нуля до базисной величины,  . Уравнение движения запишем в виде
. Уравнение движения запишем в виде
 (213)
(213)
Здесь  - угловая частота ротора генератора. Размерности всех величин приняты в системе СИ.
- угловая частота ротора генератора. Размерности всех величин приняты в системе СИ.
Разрешим уравнение (213) относительно 
 (214)
(214)
Уравнение (213) устанавливает связь между приращением (дифференциалом) угловой частоты и отрезком времени, соответствующим данному приращению. Для определения времени, за которое  изменится от нуля до
изменится от нуля до  достаточно проинтегрировать (214)
достаточно проинтегрировать (214)
Откуда
 (215)
(215)
В свою очередь  у машины с числом пар полюсов, равным
у машины с числом пар полюсов, равным 
Таким образом, инерционная постоянная времени в секундах
 (216)
(216)
При измерении времени в радианах (о.е.)
 или
или
 , радиан.
, радиан.
Уравнения асинхронной машины в
относительных единицах.
Исходная система уравнений в единицах, имеющих размерность
 (217)
(217)
В этих выражениях  - оператор дифференцирования по синхронному времени;
- оператор дифференцирования по синхронному времени;  - угол поворота ортогональных осей относительно неподвижных осей статора;
- угол поворота ортогональных осей относительно неподвижных осей статора;  - угол поворота ротора относительно статора;
- угол поворота ротора относительно статора;  - синхронная угловая частота;
- синхронная угловая частота;  - ускорение ротора,
- ускорение ротора,  ;
;
Введем следующие базисные величины и примем обозначения:
 - базисное напряжение цепей статора;
- базисное напряжение цепей статора;
 - базисный ток цепей статора;
- базисный ток цепей статора;
 , следовательно,
, следовательно,  ;
;
 - базисная мощность;
- базисная мощность;
 - базисный момент;
- базисный момент;
 - базисный ток цепей ротора;
- базисный ток цепей ротора;
 - базисное напряжение цепей ротора;
- базисное напряжение цепей ротора;
 - постоянная времени цепей ротора, рад;
- постоянная времени цепей ротора, рад;
по аналогии с синхронной машиной обозначим
 - переходная реактивность цепей статора, тогда
- переходная реактивность цепей статора, тогда
 , Ом и
, Ом и
 , о.е.
, о.е.
По определению инерционной постоянной времени  .
.
Это позволяет преобразовать выражение  к виду
к виду
Разделив уравнения цепей статора на  , а цепей ротора на
, а цепей ротора на  и принимая во внимание принятые обозначения получим уравнения асинхронной машины в о.е.
и принимая во внимание принятые обозначения получим уравнения асинхронной машины в о.е.
 (218)
(218)
Запишем полученную систему уравнений в осях, вращающихся с синхронной скоростью -  , тогда
, тогда

Примем также во внимание, что в относительных единицах токи ротора  и
и  численно равны э.д.с.
численно равны э.д.с.  и
и  , индуктируемым этими токами, т.е.
, индуктируемым этими токами, т.е.
 .
.
И наконец, обозначим  Это позволяет систему уравнений (218) привести к виду:
Это позволяет систему уравнений (218) привести к виду:
 (219)
(219)
В случае, когда скорость ортогональных осей отлична от синхронной, система уравнений (219) примет вид
 (220)
(220)
При анализе работы асинхронной машины неизвестными переменными координатами являются  и
и  . Общее число независимых уравнений в системах (218), (219), (220) равно числу неизвестных. Это значит, что при заданных исходных значениях переменных каждая система имеет единственное решение. Трудность аналитического решения определяется нелинейностью уравнений, уравнения содержат произведения искомых переменных. Таким образом, для аналитического решения уравнения требуют линеаризации.
. Общее число независимых уравнений в системах (218), (219), (220) равно числу неизвестных. Это значит, что при заданных исходных значениях переменных каждая система имеет единственное решение. Трудность аналитического решения определяется нелинейностью уравнений, уравнения содержат произведения искомых переменных. Таким образом, для аналитического решения уравнения требуют линеаризации.
Электромеханическая система и принцип
наименьшего действия.
Любые S величин q1, q2, … , qs вполне характеризирующие положение и состояние электромеханической системы (с S степенями свободы), называют её обобщенными координатами, а их производные  - обобщенными скоростями.
- обобщенными скоростями.
Знание обобщенных координат еще не определяет, тем не менее, полного состояния системы в данный момент времени в том смысле, что оно не позволяет предсказать положение системы в последующие моменты времени. При заданных значениях координат система может обладать произвольными скоростями, а в зависимости от последних будут различными и положения системы в следующий момент времени (т.е. через бесконечно малый интервал  ).
).
Как показывает опыт, одновременное же задание координат и скоростей полностью определяет состояние системы и позволяет в принципе предсказать её дальнейшее движение.
С математической точки зрения это значит, что заданием всех координат  и скоростей
и скоростей  в некоторый момент времени однозначно определяются и значения ускорений
в некоторый момент времени однозначно определяются и значения ускорений  в этот момент.
в этот момент.
Соотношения, связывающие ускорения с координатами и скоростями называют уравнениями движения (в обобщенном смысле). По отношению к функциям  это – дифференциальные уравнения второго порядка, интегрирование которых позволяет в принципе определить эти функции, т.е. «траектории» движения элементов системы.
это – дифференциальные уравнения второго порядка, интегрирование которых позволяет в принципе определить эти функции, т.е. «траектории» движения элементов системы.
Принцип наименьшего действия (принцип Гамильтона)
Наиболее общая формулировка закона движения электромеханических систем дается так называемым принципом наименьшего действия (или принципом Гамильтона) . согласно этому принципу каждая электромеханическая система может быть охарактеризована определенной функцией
 или в краткой записи
или в краткой записи  , причем движение системы удовлетворяет следующему условию.
, причем движение системы удовлетворяет следующему условию.
 Пусть в моменты времени
Пусть в моменты времени  и
и  система занимает определенные положения, характеризуемые двумя наборами значений координат
система занимает определенные положения, характеризуемые двумя наборами значений координат  и
и  . Тогда между этими положениями система движется таким образом; что интеграл
. Тогда между этими положениями система движется таким образом; что интеграл
 (221)
(221)
Имеет наименьшее значение. Функцию
 (222)
(222)
Называют функцией Лагранжа или силовой функцией, а интеграл (221) – действием или функционалом действия.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|