- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Асинхронная машина. 1 страница
Понятие о изображающем векторе
многофазных величин
Необходимость введения понятия «изображающий вектор» возникла при анализе работы электрических машин в различных электрических и электромеханических системах. Замечательной особенностью изображающего вектора (и. в.) является то, что он может служить для характеристики величин, имеющих как полевой характер, так и для величин, представленных в виде ограниченного множества дискретно распределенного в пространстве.
Физической предпосылкой к введению понятия «изображающий вектор» служит общеизвестный факт, что в электрической машине существует единое магнитное поле, являющееся результатом совокупного действия токов, протекающих по всем её обмоткам.
Пренебрегая краевыми эффектами на торцах магнитного ядра машины, единое электромагнитное поле в зазоре электрической машины можно считать плоско – параллельным. Следовательно, его можно изобразить в виде некоторого пространственного вектора в осях машины. С другой стороны, поскольку электромагнитное поле проявляется во всем рассматриваемом объеме электрической машины, изобразить его в виде единственной векторной величины можно чисто условно, отразив всего два его наиболее характерных признака (параметра) (в частности для магнитного поля это могут быть величина магнитного потока и направление вектора максимальной магнитной индукции относительно осей машины, либо два любых других параметра). Поэтому вектор (о котором речь) получил название «изображающий вектор».
Наиболее просто понятие о и.в. получить, рассматривая трехфазную систему переменных величин, например токов.
Пусть по фазным обмоткам a, b, c электрической машины протекают токи ia(f), ib(f), ic(f), являющиеся функциями времени.
На рис. 1 в плоскости поперечного сечения машины представлены пространственные оси фазных обмоток рассматриваемой машины.
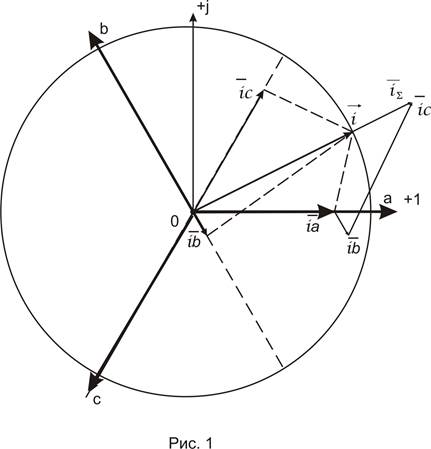
Следует сразу же оговориться, что в качестве положительного направления вращения принято направление против часовой стрелки. Поле в зазоре машины, вращаясь в положительном направлении, достигает максимума своей интенсивности последовательно в фазах a, b, и c. Поэтому при положительном обходе зазора машины за осью фазы a должна следовать ось фазы b и т.д.
Обозначим 

 - пространственные векторы, модули которых в принятом масштабе равны мгновенным значениям соответствующих фазных токов, а направления совпадают с направлениями осей соответствующих фазных обмоток, если токи положительны и меняют направления на противоположные когда токи отрицательны.
- пространственные векторы, модули которых в принятом масштабе равны мгновенным значениям соответствующих фазных токов, а направления совпадают с направлениями осей соответствующих фазных обмоток, если токи положительны и меняют направления на противоположные когда токи отрицательны.
По определению и.в. тока (точнее и.в. трехфазной системы токов), построенный и записанный в координатной системе фазных осей машины, равен  или (1)
или (1)
 , (2) где
, (2) где  ,
,  ,
,  - орты соответствующих фазных осей.
- орты соответствующих фазных осей.
Примечание. В m – фазной системе соответствующий и.в. по определению равен
 (3)
(3)
Здесь  ,
,  , …
, …  - мгновенные значения токов в соответствующих фазах
- мгновенные значения токов в соответствующих фазах
 ,
,  , … ,
, … ,  - орты соответствующих фазных осей.
- орты соответствующих фазных осей.
Возвращаемся к 3-х фазной системе. Если рассматривать плоскость фазных осей как комплексную, совместив в частном случае ось действительных величин с осью фазы a , орты фазных осей симметричной трехфазной машины могут быть представлены выражениями:
 (4)
(4)
В выражениях (4)  - оператор поворота на треть окружности или 1200. При этом
- оператор поворота на треть окружности или 1200. При этом
Таким образом, и.в. тока, построенный в фазных осях машины, в принятой комплексной плоскости можно выразить уравнением
 (5)
(5)
Прямое и обратное преобразование
Парка – Горева.
Смысл преобразования Парка – Горева заключается в нахождении формул, позволяющих и.в., построенных в фазных осях машины, записать в ортогональных осях , вращающихся с произвольной скоростью относительно фазных осей. Рассмотрим две координатные системы с общим началом:
a, b, c – система неподвижных фазных осей машины и x, y – система ортогональных осей, вращающихся относительно первой с некоторой произвольной скоростью Ωax (рис. 2). Здесь  - угол между осью фазы a и
- угол между осью фазы a и
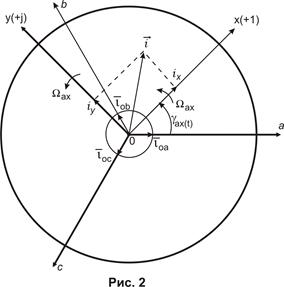 осью x. В общем случае
осью x. В общем случае
 (6)
(6)
В уравнении (6) сделан прозрачный намек на то обстоятельство, что скорость вращения осей x, y относительно фазных осей машины вовсе не обязана быть постоянной.
Запишем и.в. тока  , формула (5), построенный в фазных осях машины, во вращающихся ортогональных осях x, y. Это означает, что в осях x и y необходимо записать компоненты и.в. (5)
, формула (5), построенный в фазных осях машины, во вращающихся ортогональных осях x, y. Это означает, что в осях x и y необходимо записать компоненты и.в. (5)
 ,
,  и
и 
Каждый из пространственных векторов  ,
,  и
и  равен произведению своего модуля на орт, определяющий направление. Поскольку модуль вектора не меняется при переходе от одних осей к другим, а меняться может только ориентация вектора по отношению к новой координатной системе, следовательно, для записи вектора в осях x, y достаточно записать в этих осях его орт. Обозначим
равен произведению своего модуля на орт, определяющий направление. Поскольку модуль вектора не меняется при переходе от одних осей к другим, а меняться может только ориентация вектора по отношению к новой координатной системе, следовательно, для записи вектора в осях x, y достаточно записать в этих осях его орт. Обозначим  ,
,  ,
,  - орты осей a, b, c машины, записанные в осях x, y.
- орты осей a, b, c машины, записанные в осях x, y.
Если рассматривать плоскость осей x, y в качестве комплексной, приняв в качестве действительной ось x, а мнимой – y, можно записать:
 (7)
(7)
Таким образом, пространственные векторы фазных токов машины, построенные в собственных фазных осях, но записанные во вращающихся осях x и y имеют вид:
 (8)
(8)
Сам изображающий вектор тока, записанный в осях x, y, принимает вид
 (9)
(9)
Из формулы (9) следует: для записи и.в., построенного и записанного в собственных фазных осях, в новых, вращающихся с произвольной скоростью, достаточно исходный и.в. умножить на оператор поворота, exp[-jγax(t)], исходной системы осей относительно новых, x, y. В осях x, y и.в.  имеет компоненты по осям: ix и iy.
имеет компоненты по осям: ix и iy.
В комплексной форме можно записать
 . (10)
. (10)
Перепишем выражения (8), используя формулу Эйлера:
 ,
,
а именно:
 (11)
(11)
Как известно, два комплексных числа равны тогда и только тогда, когда равны между собой их действительные и мнимые части. Аналогично для векторов можно утверждать: два вектора равны друг другу, когда равны между собой их проекции на выбранные координатные оси. На основании этих правил, используя выражения (9), (10) и (11), для действительной и мнимой части комплекса  можем записать:
можем записать:
 (12)
(12)
По существу, система (12) является прямым преобразованием Парка – Горева и связывает проекции и.в. на ортогональные оси, вращающиеся с произвольной скоростью Ωax(t), с мгновенными значениями переменных фазных величин. Следует помнить, что γax(t), входящая в эти выражения, является в общем случае функцией времени (6). Формулу преобразования Парка – Горева часто записывают в матричной форме:
 (13)
(13)
Для нахождения мгновенных значений фазных величин используют обратное преобразование Парка – Горева, которое можно получить, дополнив уравнение (13) выражением для тока нулевого чередования фаз 3 – х фазной системы
 (14)
(14)
и разрешив полученные уравнения относительно фазных токов. В результате получаем обратное преобразование Парка – Горева
 (15)
(15)
Здесь уместно сделать ряд замечаний:
1) введение уравнения (14) имеет, в известной степени, формальный характер и служит исключительно для придания определенности обратному преобразованию Парка – Горева; величины нулевого чередования фаз изображающих векторов не имеют, т.к. геометрическая сумма их пространственных векторов равна нулю;
2) в случае несимметричной многофазной системы последняя может быть разложена на симметричные и для систем прямого и обратного чередования фаз можно построить свои изображающие векторы.
Изображающий вектор симметричной 3 – х фазной системы токов.
 Плоскость фазных осей машины будем рассматривать как комплексную, совместив ось действительных (+1) с осью фазы a. Пусть токи в фазных обмотках изменяются по синусоидальному закону и ток фазы a при t=0 равен амплитудному значению. При этом условии законы изменения токов в фазах запишутся в виде:
Плоскость фазных осей машины будем рассматривать как комплексную, совместив ось действительных (+1) с осью фазы a. Пусть токи в фазных обмотках изменяются по синусоидальному закону и ток фазы a при t=0 равен амплитудному значению. При этом условии законы изменения токов в фазах запишутся в виде:
 .
.
Запишем cosαв виде  , тогда
, тогда
 (16)
(16)
Подставим найденные выражения фазных токов (16) в уравнение (5) для  помня при этом, что
помня при этом, что 

 ,
,  и
и  и
и  .
.
Таким образом, имеем:

 .
.
Разделим в последнем выражении слагаемые содержащие  , а также произведем элементарные упрощения
, а также произведем элементарные упрощения
 , но
, но
 , следовательно
, следовательно
 (17)
(17)
Таким образом, можно сделать вывод, что и.в. симметричной 3 – х фазной системы переменных величин – это вращающийся вектор, модуль которого остается постоянным и равным амплитуде фазной величины, а скорость вращения относительно фазных осей равна угловой частоте,  , где
, где  - частота изменения фазных величин. Легко доказать, что это же распространяется и на изображающие векторы m – фазных систем.
- частота изменения фазных величин. Легко доказать, что это же распространяется и на изображающие векторы m – фазных систем.
Опять же на примере и.в. 3 – х фазной системы токов покажем, что проекция и.в. на фазную ось дает (равна) мгновенному значению переменной данной фазы. Действительно, по определению скалярного произведения двух векторов
 .
.
Поэтому проекцию и.в. на какую-либо ось находим как скалярное произведение соответствующего и.в. на единичный орт оси.
Если векторы на плоскости заданы своими координатами:  и
и  , то
, то  (18)
(18)
Проекции  на ось фазы a равна
на ось фазы a равна



Считая ось действительных осью x, а мнимых – y, находим:
 (19) но при отсутствии токов нулевого чередования фаз, которые изображающего вектора не имеют,
(19) но при отсутствии токов нулевого чередования фаз, которые изображающего вектора не имеют,
 или
или
 (20)
(20)
Подставив (20) в (19), имеем
 (21)
(21)
Аналогично можно доказать, что
 (22)
(22)
Обобщенные уравнения для напряжений многофазных обмоток машин переменного тока.
Рассмотрим 3-х фазную якорную обмотку синхронной или асинхронной машины. Уравнения напряжений, приложенных к фазным обмоткам имеют вид:
Следовательно,
 (23)
(23)
Здесь Ua, Ub, Uc – напряжения (мгновенные значения), приложенные к фазным обмоткам из внешней цепи; ia, ib, ic – токи в фазных обмотках;
ψa, ψb, ψc – потокосцепления соответствующих фазных обмоток.
r – активное сопротивление каждой из фазных обмоток (считаем их симметричными).
По определению и.в. напряжений, потокосцеплений и токов, построенные в фазных осях машины и записанные в произвольной ортогональной координатной системе x, y, равны:
 (24)
(24)
Найдем производную по времени от и.в.  , помня, что функциями времени являются как потокосцепления фазных обмоток, ψa, ψb, ψc, так и угол γax(t).
, помня, что функциями времени являются как потокосцепления фазных обмоток, ψa, ψb, ψc, так и угол γax(t).

откуда
 (25)
(25)
Здесь  - мгновенное значение угловой скорости координатных осей x, y относительно осей a, b, c, в которых построены изображающие векторы.
- мгновенное значение угловой скорости координатных осей x, y относительно осей a, b, c, в которых построены изображающие векторы.
Подставим выражения (23) в уравнение для  из (24)
из (24)

Используя выражения (24) и (25), получаем
 (26)
(26)
Выражение (26) является обобщенным уравнением для напряжений обмоток машины переменного и постоянного тока, записанное в векторной форме. При использовании этого уравнения необходимо помнить, что  - мгновенное значение угловой скорости координатных осей x, y , в которых записаны изображающие векторы, относительно фазных осей, в которых эти векторы построены.
- мгновенное значение угловой скорости координатных осей x, y , в которых записаны изображающие векторы, относительно фазных осей, в которых эти векторы построены.
Рассматривая плоскость осей x, y как комплексную, где x – ось действительных, а ось y – мнимых, каждый из и.в. ,  и можем записать в виде, рис.2
и можем записать в виде, рис.2
 (27)
(27)
Подставим выражения (27) в уравнение (26) и выделим действительные и мнимые величины. Известно, что два комплекса равны тогда и только тогда, когда равны между собой их действительные и мнимые части. После элементарных преобразований имеем:
 (28)
(28)
Таким образом, вместо одного векторного уравнения (26) получили два скалярных уравнения (28).
Все разнообразие частных случаев записи обобщенного уравнения определяется выбором осей, в которых записываются изображающие векторы и осей, в которых эти векторы строятся.
Если исследуются электродинамические процессы, и.в. всегда должны строиться в фазных осях того элемента эл. Машины (статор, ротор), которому принадлежат соответствующие фазные величины. Записывать же изображающие векторы можно в любых осях из условия наиболее простого решения конкретной задачи.
Существуют общепринятое обозначение ортогональных осей, а именно:
α, β – оси, неподвижные относительно фазных осей;
d, q – оси, жестко закрепленные на роторе;
U, V – оси, вращающиеся с синхронной скоростью относительно фазных осей;
x, y – оси, вращающиеся с произвольной скоростью относительно фазных.
Физический смысл элементов обобщенного уравнения.
По определению является и.в. многофазной системы напряжений внешних по отношению к многофазной обмотке.
Отсюда вытекает, что 
 и
и  являются компонентами
являются компонентами  , уравновешивающие соответствующие падения напряжения и Э.Д.С. Говорить об их физическом смысле весьма затруднительно, поскольку сами по себе изображающие векторы являются математическими образами, математическими моделями реальных физических величин. Поэтому приходится прибегать к аналогиям. Обратимся к одному из уравнений (23)
, уравновешивающие соответствующие падения напряжения и Э.Д.С. Говорить об их физическом смысле весьма затруднительно, поскольку сами по себе изображающие векторы являются математическими образами, математическими моделями реальных физических величин. Поэтому приходится прибегать к аналогиям. Обратимся к одному из уравнений (23)

Здесь Ua – внешнее напряжение, приложенное к фазе a;
 - его составляющая, уравновешивающая падение напряжения на активном сопротивлении фазной обмотки;
- его составляющая, уравновешивающая падение напряжения на активном сопротивлении фазной обмотки;
 - составляющая напряжения, уравновешивающая Э.Д.С., которая индуктируется в фазе a изменяющимся по оси фазы потокосцеплением.
- составляющая напряжения, уравновешивающая Э.Д.С., которая индуктируется в фазе a изменяющимся по оси фазы потокосцеплением.
Исходя из этих соображений, будем называть  падением напряжения на активном сопротивлении фазы при протекании по ней тока
падением напряжения на активном сопротивлении фазы при протекании по ней тока  .
.
 - Э.Д.С. от изменяющегося и.в. потокосцеплений
- Э.Д.С. от изменяющегося и.в. потокосцеплений  трансформаторного характера,
трансформаторного характера,
а  - Э.Д.С. вращения и.в. вместе с осями x, y.
- Э.Д.С. вращения и.в. вместе с осями x, y.
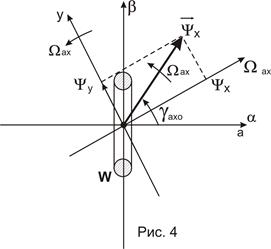 Рассмотрим пример. Пусть и.в. потокосцеплений неподвижной обмотки W построен во вращающихся осях x и y и в этих осях неизменен по величине и положению, рис. 4. относительно оси обмотки его можно записать в виде
Рассмотрим пример. Пусть и.в. потокосцеплений неподвижной обмотки W построен во вращающихся осях x и y и в этих осях неизменен по величине и положению, рис. 4. относительно оси обмотки его можно записать в виде
 (29)
(29)
В обмотке W это потокосцепление будет индуктировать Э.Д.С.
 (30)
(30)
Сравнивая выражение (30) с  , приходим к выводу о их полной аналогии. Однако имеется и существенная разница. Говоря о
, приходим к выводу о их полной аналогии. Однако имеется и существенная разница. Говоря о  , мы эту Э.Д.С. связываем с вращающимся относительно неподвижной обмотки потокосцеплением
, мы эту Э.Д.С. связываем с вращающимся относительно неподвижной обмотки потокосцеплением  , а говоря о Э.Д.С. вращения
, а говоря о Э.Д.С. вращения  , последняя связывается со скоростью вращения осей x и y относительно неподвижных осей многофазной обмотки. То-есть, выбрав оси, для которых
, последняя связывается со скоростью вращения осей x и y относительно неподвижных осей многофазной обмотки. То-есть, выбрав оси, для которых  , избавляемся от Э.Д.С. вращения в обобщенном уравнении. Тем не менее, это противоречие кажущееся, поскольку, не зависимо от того, в каких осях записано обобщенное уравнение напряжений, обобщенная Э.Д.С. в общем случае равна
, избавляемся от Э.Д.С. вращения в обобщенном уравнении. Тем не менее, это противоречие кажущееся, поскольку, не зависимо от того, в каких осях записано обобщенное уравнение напряжений, обобщенная Э.Д.С. в общем случае равна
 (31)
(31)
Выбирая те или иные ортогональные оси, мы можем избавиться либо от первого, либо от второго слагаемого в выражении (31), но чаще всего в обобщенном уравнении напряжений присутствуют обе составляющие Э.Д.С.
Рабочая система единиц.
При выполнении расчетов электроэнергетических систем привычными для нас являются Вольты, Амперы, Омы или относительные единицы (о.е.). В обобщенные уравнения напряжений входят потокосцепления, измеряемые в Веберах =  .
.
Для удобства, с целью упрощения расчетов, обобщенные уравнения преобразуют таким образом, что потокосцепления приобретают размерность – Вольты, а время становиться безразмерным с размерностью о.е. или радиан. Это достигается достаточно просто: элементы в правой части уравнения (31) умножаются и делятся на базисную или синхронную частоту
 .
.
В результате получаем

Переходя к размерностям, имеем:
 или
или


Таким образом, в дальнейшем, используя уравнения напряжений, если не будет специально оговорено, принимаем, что
 , Вольт,
, Вольт,  , радиан = о.е.,
, радиан = о.е.,  , о.е.
, о.е.
Уравнения электрического и механического
состояния синхронной и асинхронной машины
в ортогональных осях.
Обобщенное уравнение напряжений многофазных обмоток позволяет записать уравнения электрического равновесия в ортогональной системе осей, вращающихся с произвольной скоростью, для любой электрической машины. Однако при записи уравнений необходимо учитывать конструктивные особенности машины и выбирать оси, в которых магнитные проводимости машины остаются неизменными независимо от положения ротора. Это есть условием получения полной системы дифференциальных уравнений с постоянными коэффициентами при переменных функциях.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|