- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Асинхронная машина. 3 страница
Сказанное выше относится в полной мере к реактивностям xy и xary с той лишь разницей, что в этом случае ось фазной обмотки должна совпадать с осью у принятой ортогональной системы координатных осей.
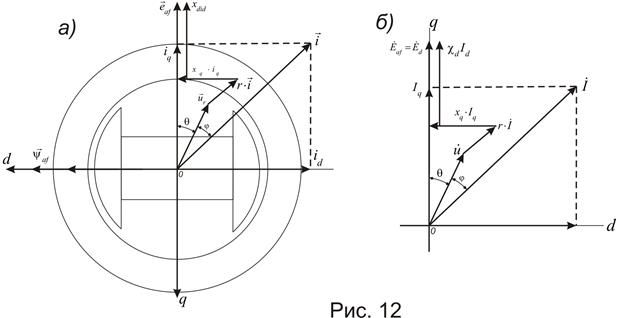
На рис. 12 показаны: а) пространственная диаграмма изображающих векторов многофазных систем параметров синхронной машины; б) векторная диаграмма комплексов, изображающих те же параметры, отнесенные к фазе обмотки, но уже переменные во времени.
Замечательным свойством изображающих векторов многофазных систем электрических и магнитных параметров электрической машины является то, что их диаграмма пространственных векторов, построенная на поперечном сечении эквивалентной 2-х полюсной машины, полностью совпадает с векторной диаграммой для временных комплексов этих же самых параметров. При этом углам сдвига по фазе соответствуют углы сдвига в пространстве машины в электрических градусах, а отношения между модулями пространственных изображающих векторов совпадают с отношениями между модулями комплексов, изображающих на векторной диаграмме переменные во времени параметры. Из этого вытекает, что реактивности собственная, xx и взаимная, xarx, которые мы нашли как некоторые обобщенные, являются одновременно соответствующими реактивностями фазной обмотки машины.
Особенности конструкции электрических машин и их влияние на выбор ортогональных осей, в которых рационально записывать уравнения.
Как известно, с точки зрения симметрии, существуют следующие типы электрических машин:
а) машины с полной электрической и магнитной симметрией относительно произвольной оси, проходящей через центр поперечного сечения; сюда относим асинхронные машины;
б) машины с магнитной симметрией и электрической асимметрией относительно произвольной оси (синхронные машины с неявновыраженными полюсами);
в) машины с электрической и магнитной асимметрией относительно произвольной оси (синхронные машины с явновыраженными полюсами и машины постоянного тока).
В асинхронных машинах, обладающих электрической и магнитной симметрией, при любом положении осей x и y магнитные проводимости для потоков взаимоиндукции и рассеяния будут оставаться неизменными по этим осям, следовательно
 (78)
(78)
Если число фаз на статоре равно числу фаз на роторе, m=mr , то
 (79)
(79)
Для потокосцеплений асинхронной машины в этом случае будут справедливы следующие выражения:
 (80)
(80)
Или те же потокосцепления в проекциях на координатные оси:
 (81)
(81)
Из уравнений (74) и (75) вытекает, что для получения постоянных значений сопротивлений, а, следовательно, для получения дифференциальных уравнений электрической машины с постоянными коэффициентами, необходимо выбирать такие координатные оси, по которым магнитные проводимости машины  не изменяются при вращении её ротора.
не изменяются при вращении её ротора.
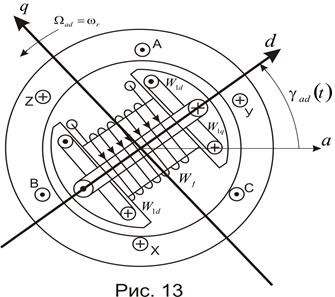
В явнополюсной машине, машине с электрической и магнитной асимметрией, магнитные проводимости остаются неизменными только по осям, жестко связанным с полюсами индуктора. При этом целесообразно принимать за координатные оси продольную и поперечную оси индуктора, d и q.
В этом случае проекции на оси d и q и.в. потокосцеплений обмотки якоря синхронной машины с успокоительными обмотками на полюсах индуктора будут равны:
 (82)
(82)
где  ,
,  - сопротивление взаимной индукции фазы обмотки якоря с успокоительными обмотками по осям d и q при совпадении их осей;
- сопротивление взаимной индукции фазы обмотки якоря с успокоительными обмотками по осям d и q при совпадении их осей;
 - сопротивление взаимной индукции фазы обмотки якоря с обмоткой возбуждения при совпадении их осей;
- сопротивление взаимной индукции фазы обмотки якоря с обмоткой возбуждения при совпадении их осей;
 Xd и Xq – сопротивления обмотки якоря по осям d и q (имеют тот же физический смысл, что и сопротивления Xx и Xy в выражениях (74) и (77);
Xd и Xq – сопротивления обмотки якоря по осям d и q (имеют тот же физический смысл, что и сопротивления Xx и Xy в выражениях (74) и (77);
 - ток в обмотке возбуждения;
- ток в обмотке возбуждения;
 - токи в успокоительных обмотках;
- токи в успокоительных обмотках;
 - проекции и.в. токов якоря на оси d и q.
- проекции и.в. токов якоря на оси d и q.
Потокосцепления обмотки возбуждения и успокоительных обмоток явнополюсной синхронной машины в осях d и q равны:
 (83)
(83)
Здесь  - собственные реактивности обмотки возбуждения и успокоительных;
- собственные реактивности обмотки возбуждения и успокоительных;
 - сопротивления взаимной индукции успокоительных обмоток с обмотками якоря и возбуждения;
- сопротивления взаимной индукции успокоительных обмоток с обмотками якоря и возбуждения;
 - сопротивления взаимной индукции обмотки возбуждения с многофазной обмоткой якоря и с успокоительной обмоткой по оси d.
- сопротивления взаимной индукции обмотки возбуждения с многофазной обмоткой якоря и с успокоительной обмоткой по оси d.
Выражения собственных и взаимных реактивностей явнополюсной синхронной машины.
Рассмотрим более подробно реактивности явнополюсной синхронной машины.
Пусть  - магнитные проводимости потокам соответственно обмотки возбуждения, обмотки якоря по осям d и q, успокоительных обмоток и потокам взаимоиндукции по осям d и q;
- магнитные проводимости потокам соответственно обмотки возбуждения, обмотки якоря по осям d и q, успокоительных обмоток и потокам взаимоиндукции по осям d и q;
 - эффективные числа витков фазы обмотки якоря, обмотки возбуждения и успокоительных обмоток по соответствующим осям.
- эффективные числа витков фазы обмотки якоря, обмотки возбуждения и успокоительных обмоток по соответствующим осям.
Тогда полные синхронные реактивности обмотки якоря по осям d и q равны:
 (83)
(83)
а сопротивления реакции якоря или основные реактивности обмотки якоря по осям d и q –
 (84)
(84)
Реактивности обмотки возбуждения и успокоительных обмоток, а также реактивности взаимоиндукции находим из следующих соображений:
 - пространственная амплитуда основной гармоники кривой н.с. обмотки возбуждения на полюсном делении
- пространственная амплитуда основной гармоники кривой н.с. обмотки возбуждения на полюсном делении
 - полный магнитный поток самоиндукции обмотки возбуждения;
- полный магнитный поток самоиндукции обмотки возбуждения;
 - потокосцепление самоиндукции обмотки возбуждения в синхронных вольтах;
- потокосцепление самоиндукции обмотки возбуждения в синхронных вольтах;
или 
Таким образом,  (85)
(85)
Совершенно аналогично определяются полные индуктивные сопротивления успокоительных обмоток
 (86)
(86)
Потокосцепление фазной обмотки якоря по оси d от потока, созданного обмоткой возбуждения

Откуда для реактивности взаимоиндукции якорной обмотки с обмоткой возбуждения имеем:
 (87)
(87)
Поскольку потокосцепление  измеряется в синхронных вольтах, оно численно равно э.д.с., индуктированной в фазной обмотке статора потоки возбуждения при базисной угловой частоте,
измеряется в синхронных вольтах, оно численно равно э.д.с., индуктированной в фазной обмотке статора потоки возбуждения при базисной угловой частоте,  , вращения ротора
, вращения ротора
 (88)
(88)
По аналогии можно записать выражения для потокосцеплений и реактивностей взаимоиндукции фазной обмотки якоря с успокоительными обмотками, а также обмотки возбуждения с успокоительной обмоткой по оси d.
 (89)
(89)
 (90)
(90)
потокосцепление и реактивность взаимоиндукции фазной обмотки якоря с успокоительной обмоткой по оси d;
 (91)
(91)
 (92)
(92)
потокосцепление и реактивность взаимоиндукции фазной обмотки якоря с успокоительной обмоткой по оси q;
 (93)
(93)
 (94)
(94)
потокосцепление и реактивность взаимоиндукции обмотки возбуждения с успокоительной обмоткой по оси d;
 (95)
(95)
 (96)
(96)
потокосцепление и реактивность взаимоиндукции успокоительной обмотки по оси d с обмоткой возбуждения.
Очевидно, не будет лишним напомнить, что обмотки, расположенные во взаимно перпендикулярных плоскостях, не взаимодействуют.
При определении потокосцеплений и реактивностей взаимоиндукций обмотки возбуждения и успокоительных обмоток с обмоткой якоряследует помнить, что эти потокосцепления создаются токами всех фаз многофазной якорной обмотки. Поэтому имеем:
 (97)
(97)
 (98)
(98)
потокосцепление и реактивность взаимоиндукции обмотки возбуждения с m – фазной якорной обмоткой;
 (99)
(99)
 (100)
(100)
Потокосцепление и реактивность взаимоиндукции успокоительной обмотки по оси d c m – фазной якорной обмоткой;
 (101)
(101)
 (102)
(102)
потокосцепление и реактивность взаимоиндукции успокоительной обмотки по оси q с m – фазной якорной обмоткой.
Индуктивные сопротивления обмоток статора синхронной машины в переходном и сверхпереходном режимах.
При измерении потокосцеплений обмотки в синхронных вольтах её динамическая реактивность определяется по формуле
 , (103)
, (103)
где  - приращение потокосцепления обмотки, соответствующее
- приращение потокосцепления обмотки, соответствующее  - приращению тока в ней.
- приращению тока в ней.
В синхронной машине, точнее, говоря о синхронной машине, различают два её динамических режима: переходный и сверхпереходный.
Переходным режимом синхронной машины принято считать динамический режим либо машины без успокоительных обмоток на индукторе, либо режим с момента времени, когда токи в успокоительных обмотках практически затухли. Параметры, соответствующие переходному режиму, будем обозначать теми же буквами, но со штрихом.
Синхронная машина отличается тем, что электромагнитные постоянные времени якорных обмоток значительно меньше электромагнитной постоянной времени обмотки возбуждения. Другими словами, электромагнитное поле обмотки возбуждения обладает значительно большей инерционностью по сравнению с электромагнитным полем якорной обмотки, что объясняется конструктивными особенностями машины. Результатом является тот факт, что при скачкообразном изменении режима синхронной машины (сброс или наброс нагрузки) изменение тока в якорных цепях в первоначальный отрезок времени практически не приводит к изменению потокосцепления обмотки возбуждения. То – есть обмотка возбуждения в первоначальный отрезок времени динамического режима ведет себя аналогично сверх проводящему контуру. Как известно внешним полем невозможно изменить первоначальное потокосцепление сверхпроводящего контура. Это объясняется тем, что индуктированный в сверхпроводящем контуре изменением внешнего поля ток создаст по закону электромагнитной индукции собственное приращение потокосцепления, равное внешнему, но направленное встречно. Результатом будет нулевое приращение потокосцепления. Аналогичная картина, в той или иной степени, наблюдается в индуктивно связанных контурах.
Для того, чтобы выяснить, как отражается на результирующих реактивностях якорной обмотки описанное явление, запишем уравнения для приращений потокосцеплений синхронной машины в переходном режиме, учитывая, что  .
.
 (104)
(104)
Откуда находим:
И на основании (103)
 (105)
(105)
 (106)
(106)
 и
и  - переходные реактивности цепи якоря синхронной машины; при этом из (106) вытекает, что в переходном режиме поперечная реактивность;
- переходные реактивности цепи якоря синхронной машины; при этом из (106) вытекает, что в переходном режиме поперечная реактивность;  , равна своему значению в установившемся режиме, это объясняется тем, что по поперечной оси индуктора якорная обмотка не взаимодействует с обмоткой возбуждения.
, равна своему значению в установившемся режиме, это объясняется тем, что по поперечной оси индуктора якорная обмотка не взаимодействует с обмоткой возбуждения.
Чтобы оценить величину  раскроем выражения реактивностей, входящих в формулу (105) для .
раскроем выражения реактивностей, входящих в формулу (105) для .
 (107)
(107)
Ввиду того, что проводимость потокам рассеяния обмотки возбуждения,  , много меньше проводимости потоку взаимоиндукции машины по продольной оси,
, много меньше проводимости потоку взаимоиндукции машины по продольной оси,  .
.
 ,
,
переходная реактивность  по величине близка к реактивности потокам рассеяния обмотки статора,
по величине близка к реактивности потокам рассеяния обмотки статора,  , то – есть
, то – есть
Сверхпереходным режимом синхронной машины принято считать динамический режим машины с успокоительными (демпфирующими) контурами на индукторе, когда вытеснение приращения потока реакции якоря из магнитопровода индуктора осуществляется совместным действием, совместной реакцией обмотки возбуждения и успокоительных обмоток. Естественно потокосцепления этих обмоток в рассматриваемый промежуток времени остаются неизменными. Параметры, соответствующие переходному режиму, обозначаются своими же символами, но с двумя штрихами. Для определения результирующих реактивностей обмотки якоря в сверхпереходном режиме запишем уравнения приращений потокосцеплений рабочих контуров машины, учитывая, что

 (107)
(107)
Совместное решение первого, третьего и четвертого уравнений системы (107) позволяет найти сверхпереходную реактивность якорной обмотки по продольной оси,  , а второго и пятого уравнений – реактивность
, а второго и пятого уравнений – реактивность  . Таким образом, имеем:
. Таким образом, имеем:
 (108)
(108)
 (109)
(109)
К пониманию физической сущности переходного и сверхпереходного режимов, а соответственно и сопротивлений можно прийти, рассматривая переходные процессы в электрических цепях с индуктивно связанными элементами. Такими элементами по существу являются все электрические машины. Поскольку нас интересует качественная сторона вопроса, рассмотрим вначале наиболее простой пример, а именно, две обмотки на общем магнитопроводе. Обмотки имеют одинаковое число витков и выполнены идентично, т.е.  ,
,  . Первая обмотка подключается под постоянное напряжение, U; вторая – замкнута накоротко, рис.14; коэффициент взаимоиндукции, M, - общий для обеих обмоток. Запишем уравнения электрического состояния обмоток
. Первая обмотка подключается под постоянное напряжение, U; вторая – замкнута накоротко, рис.14; коэффициент взаимоиндукции, M, - общий для обеих обмоток. Запишем уравнения электрического состояния обмоток

 (110)
(110)
Принимая во внимание, что
 ;
;
 ;
; 
перепишем уравнения в виде
 (111)
(111)
Разделим все компоненты уравнения (111) на r и обозначим:
 ;
;  ;
;  , это дает
, это дает
 (112)
(112)
Систему дифференциальных уравнений (112) решим операторным методом, используя преобразование Лапласа и учитывая, что 
В операторной форме имеем:
 (113)
(113)
Это дает

 или
или
 (114)
(114)
Применяя обратное преобразование Лапласа к выражениям (114), находим:
 (115)
(115)
Производные от этих токов при  :
:
 (116)
(116)
При размыкании короткозамкнутой обмотки процесс нарастания тока в первой при подключении под напряжение U описывается известным выражением
 (117)
(117)
 (118)
(118)
Ввиду того, что в электромагнитных системах с ферромагнитными сердечниками потоки рассеяния много меньше потоков взаимоиндукции,
 и
и 
Это значит, что процесс нарастания тока в подключаемой обмотке при наличии короткозамкнутой и связанной с ней индуктивно протекает существенно быстрей. И эквивалентная индуктивность подключаемой обмотки определяется не полным потокосцеплением, а только потокосцеплениями от потоков рассеяния обеих обмоток.
Еще более неожиданный результат мы получаем, полагая, что весь магнитный поток, сцепленный с обмотками сосредоточен в магнитопроводе и потоки рассеяния отсутствуют. В этом случае
 и
и 
Дифференциальные уравнения, описывающие процессы в обмотках, и их решения приведены ниже без особых пояснений, поскольку последние в этом случае тривиальны
 (119)
(119)


или
Используя обратное преобразование Лапласа, находим
 (120)
(120)
Здесь мы сталкиваемся с парадоксальным явлением, когда токи в индуктивных элементах скачком изменяются от нуля до конечной величины, нарушая тем самым первый закон коммутации. Утешением служит факт, что электрических сетей без рассеяния не существует в природе. Поэтому рассмотренный случай представляет исключительно теоретический интерес. Тем не менее, подавляя потоки рассеяния, можно добиться высокой скорости нарастания тока в индуктивных элементах, вводя короткозамкнутые контуры в магнитную цепь. Графики изменения токов в индуктивносвязанных обмотках
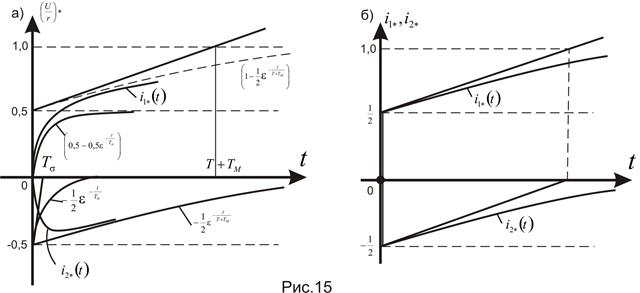
а) Индуктивные обмотки имеют поток рассеяния; б) индуктивные обмотки без потока рассеяния.
при подключении под постоянное напряжение, U, представлены на рис. 15.
Очевидно, в цепях переменного тока, содержащих индуктивносвязанные контуры, физические процессы должны протекать аналогично, хотя и со своими особенностями. Рассмотрим пример.
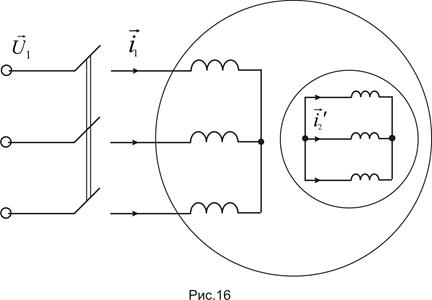
Подключение асинхронной машины к источнику
3-х фазного синусоидального напряжения.
В виду того, что магнитные проводимости асинхронной машины одинаковы по всем осям, обобщенные уравнения напряжений статорной и роторной обмоток асинхронной машины могут быть записаны в любых ортогональных осях, в том числе и осях, неподвижных относительно статора. Для машины, у которой параметры обмотки ротора приведены к параметрам обмотки статора, уравнения, записанные в осях, закрепленных на статоре, имеют вид:  (121)
(121)
Здесь  и
и  - изображающие векторы (и.в.) 3-х фазных систем токов обмотки статора и приведенной к статору обмотки ротора;
- изображающие векторы (и.в.) 3-х фазных систем токов обмотки статора и приведенной к статору обмотки ротора;
 - и.в. 3-х фазной системы напряжений, прилагаемых к статорной обмотке в момент подключения. Схематично это показано на рис. 16.
- и.в. 3-х фазной системы напряжений, прилагаемых к статорной обмотке в момент подключения. Схематично это показано на рис. 16.
Постоянные времени определяем как отношение индуктивностей или коэффициента взаимоиндукции к соответствующему активному сопротивлению обмотки.




Для приведенной машины
 - коэффициент взаимоиндукции обмоток статора и ротора. Ввиду того, что у правильно спроектированной ассинхронной машины (АМ)
- коэффициент взаимоиндукции обмоток статора и ротора. Ввиду того, что у правильно спроектированной ассинхронной машины (АМ)  и
и  , принимаем
, принимаем

 или
или 
Это позволяет уравнения (121) записать в виде
 (122)
(122)
Запишем уравнения (122) в операторной форме, имея в виду, что  и
и  .
.
 (123)
(123)
Решая уравнения (123) относительно 
 и
и  , находим
, находим
 (124)
(124)


К последнему выражению  применим обратное преобразование Лапласа. Решение для
применим обратное преобразование Лапласа. Решение для  имеет вид:
имеет вид:
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|