- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
CHAPTER 40. CONTENTS
CHAPTER 40

 Virtual Reality and Haptics in Nano- and Bionanotechnology
Virtual Reality and Haptics in Nano- and Bionanotechnology
Gaurav Sharma
Department of Mechanical and Aerospace Engineering, Rutgers, The State University of New Jersey, Piscataway New Jersey, USA
Constantinos Mavroidis
Department of Mechanical and Industrial Engineering, Northeastern University, Boston, Massachusetts, USA
Antoine Ferreira
Laboratoire Vision et Robotique, ENSI de Bourges, Universite d'Orleans, Bourges, France
CONTENTS
1. Introduction........................................................................ 2
2. Nanotechnology................................................................. 2
2. 1. Objectives and Related Problems.............................. 2
2. 2. Virtual Reality-Based Perception Solutions at
the Nanoscale............................................................. 4
2. 3. Experimental Virtual Reality Systems for
Nanotechnology....................................................... 15
3. Bionanotechnology.......................................................... 19
3. 1. Objectives and Related Problems............................ 19
3. 2. Virtual Reality-Based Perception Solutions at
the Bionanoscale...................................................... 20
3. 3. Experimental Virtual Reality Systems for
Bionanotechnology................................................... 24
4. Discussion........................................................................... 30
References........................................................................... 31
ISBN: 1-58883-042-X/$35. 00 Handbook of Theoretical and Computational Nanotechnology
Copyright © 2005 by American Scientific Publishers Edited by Michael Rieth and Wolfram Schommers
All rights of reproduction in any form reserved. Volume X: Pages (1-33)
Virtual Reality and Haptics in Nano- and Bionanotechnology
1. INTRODUCTION
Virtual Reality (VR) is a powerful technology for solving today's real-world problems. It has been conceived of as a tool to liberate consciousness—a digital mandala for the cyberian age. VR refers to computer-generated, interactive, three-dimensional environments into which people are immersed. It provides a way for people to visualize, manipulate, and interact with simulated environments through the use of computers and extremely complex data. The scientific community has been working in the field of VR for some years now, having recognized it as a very powerful human-computer interface. They are able to exploit VR for visualizing scientific data and for modeling and animating complex engineering systems.
The traditional applications of VR have been in the areas such as medicine, education/arts/ entertainment and the military. Are there any new and emerging domains in which VR could prove beneficial now, or in the near future?
Emerging VR applications such as manipulation of molecules for development of nano-technology devices and chemical systems, scientific and technical visualization, and so forth have less maturity and even fewer validation data at this time, compared to the traditional applications mentioned above; therefore, it is important to review such applications here, for the benefit of students and researchers alike. This article describes some of the emerging applications of VR recently completed or currently underway in the fields of nanotechnology and bionanotechnology.
Nanotechnology has emerged as a new frontier in science and technology. The essence of nanotechnology is the ability to work at the molecular level, atom by atom, to create large structures or devices with fundamentally new molecular organization. Bionanotechnology is a branch of nanotechnology that uses biological starting materials or biological design principles or has biological (life science) applications.
VR techniques are currently being explored in nanoscience and biotechnology research as a way to enhance the operator's perception (vision and haptics) by approaching more or less a state of " full immersion" or " telepresence. " The development of nanoscale devices or machine components presents difficult fabrication and control challenges. Such devices will operate in microenvironments whose physical properties differ from those encountered by conventional parts. Particularly interesting microenvironments are those involved in nanomedicine and space applications. In nano-medicinal applications, nanorobots could operate inside the body to provide significant new capabilities for diagnosis and treatment of diseases. In space-related applications, the environment could be the vacuum of outer space, where the protein-based nanomachines could be assembled and form multi-degree of freedom nanodevices that could apply forces and manipulate objects in the nanoworld, transfer information from the nano- to the microworld, and travel in the nanoenvironment. Because these nanoscale devices have not yet been fabricated, evaluating possible designs and control algorithms requires using theoretical estimates and virtual interfaces/environments. Such interfaces/simulations can operate at various levels of detail to trade-off physical accuracy, computational cost, number of components, and the time over which the simulation follows the nano-object behaviors. They can enable nanoscientists to extend their eyes and hands into the nanoworld and also enable new types of exploration and whole new classes of experiments in the biological and physical sciences. VR simulations can also be used to develop virtual assemblies of nano- and bionanocomponents into mobile linkages and predict their performance.
2. NANOTECHNOLOGY
2. 1. Objectives and Related Problems
Nanotechnology can best be defined as a description of activities at the level of atoms and molecules that have applications in the real world. A nanometer is a billionth of a meter; that is, about 1/80, 000 of the diameter of a human hair, or 10 times the diameter of a hydrogen atom. The size-related challenge is the ability to measure, manipulate, and assemble matter with features on the scale of 1-100 nm. Figure 1 shows two nanogears in mesh.
Virtual Reality and Haptics in Nano- and Bionanotechnology
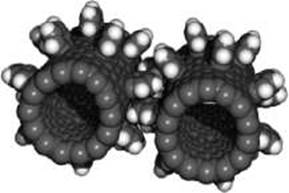
Figure 1. Nanogears no more than a nanometer wide could be used to construct a matter compiler, which could be fed raw material to arrange atoms and build a macroscale structure. Courtesy of NASA Ames Research Center.
To achieve cost effectiveness in nanotechnology, it will be necessary to automate molecular manufacturing. The engineering of molecular products needs to be carried out by robots, which have been termed nanomanipulators (NM). On one side, some researchers are trying to understand more about the nanoworld physics and chemistry, and on the other side, robotics researchers are attempting to construct new tools, new control and sensing technologies, and human-machine interfaces specific to the nanoworld. Ideal performance requirements are such that a human operator manipulates microparts in the normal-size world and performs tasks (such as cutting, grasping, transportation, assembly, scratching, digging, and stretching) that have a direct similar mapping at the nanoworld [1, 2]. So far, scanning tunnelling microscopy (STM) [3], scanning electron microscopy (SEM), atomic force microscopy (AFM) [4], and scanned-probe microscope (SPM) [5] seem to be the common tools for scanning and manipulating at the nanoscale. Current work is mainly focused on using atomic force microscope nanoprobes for teleoperated physical interactions and manipulation at the nanoscale. The disadvantage is that it is generally less accurate than the STM, and as the AFM can directly contact the sample, sharpness and wear of the tool plays an important role. As STM is a noncontact method (under vacuum conditions), it has little tool wear, but the manipulation is limited to conducting and semiconductor materials. Laser beams can also be used to trap and manipulate small particles. A laser apparatus, called OT (optical tweezers) [6], provides the user with a noncontact method for manipulating objects that can be applied viruses, bacteria, living cells, or synthetic micro- and nanoscale particles. AFM and STM are generally limited to two dimensions with a very limited third dimension, whereas OT can work in three dimensions. For these nano-handling tools, it appears quickly that only visual feedback is not enough for precise nanomanipulation because of the scaling effects.
VR technology comes to our aid by providing the experience of perception and interaction with the nanoworld through the use of sensors, effectors, and interfaces in a simulated environment. These interfaces transform the signals occurring at nanoscale processes into signals at macrolevel and viceversa. The requirement is that the communication with the nanoworld must be at a high level and in real time, preferably in a natural, possibly intuitive " language". Considering the nanospecific problems related to task application, tools, and the interconnection technologies, leads to many flexible nanomanipulation concepts, which range from pure master/slave teleoperation (through three-dimensional (3D) visual/VR or haptic force feedback), over shared autonomy control (where, e. g., some degrees of freedom are teleoperated and others are operating autonomously), to fully autonomous operation.
Although many of the described technologies have been developed into more or less mature products for robots acting in the macroworld, the nanosize of the objects poses extreme challenges and requires a complete rethinking of the visual and haptic perception of the nanoworld.
4 Virtual Reality and Haptics in Nano- and Bionanotechnology
2. 2. Virtual Reality-Based Perception Solutions at the Nanoscale 2. 2. 1. Restricted Visual Information
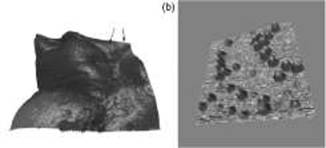
The working environment must be perceivable by the operator, and information in the processing scene must be transmitted accurately to the operator. As far as nanotasks are concerned; tools must be arranged in the observing area (colocality), bilateral magnification must be stable and fully transparent, and direct and natural perception is required with 3D movements, dynamic images, sound, and aural interfaces. From the vision feedback point of view, virtual environment (VE) interfaces provide insights and useful capabilities to scanned-probe microscopes. Indeed, the field of view or scanning is in most cases restricted to a small area, and the distance between nano-objects and the lens or the probe is very short. Moreover, scanning (which is on the order of seconds or minutes in some cases) does not allow online imaging. However, because the same single probe is used for both functions, scanning and nanomanipulating, the latter two can not physically be achieved in parallel, whatever the scanning speed is. Finally nano-operation is executed, in general, within the field of view. The limitation of this method is that while manipulating the specimen, the graphic display is static and requires additional scans to see the result of the manipulation. All of the data about the surface that has been scanned are in fact, available to the scientist in a grayscale image. The scientist can measure any feature of the data to exacting precision, using standard techniques such as cross sections and statistical algorithms. The benefit of visualization comes from getting multiple naturally controlled views (two-dimensional [2D] pseudo-color display or 3D VR topology) of the data that lead to specific insights in data analysis. For very flat surfaces with small nanostructures, a 2D pseudo-color view is superior to a shaded 3D view for two reasons: the pseudo-coloring devotes the entire intensity range to depth (and is sometimes imperceptible in a 3D display) and obscures small fluctuations caused by noise in the image. Small features on surfaces with other height variations are better brought out using specular highlighting of a 3D surface (and are often imperceptible in 2D display) [7]. To provide an intuitive interface that hides the details of performing complex tasks using an AFM or SPM nanomanipulator, a 3D VR topology can be built and displayed to the user (Fig. 2b). It takes the 2D array of heights, tessellates with triangles, and uses a graphics computer to draw it as a surface in 3D [8]. A 3D virtual nanoworld can be a global view of the real nanoworld or be restricted to the actual working area [9, 10], according to operator need. Static or intuitively manipulated multiple 2D or 3D views are then allowed in real time [11, 12]. In addition, remote features may be augmented with multiple contrasting colors to present data in a comprehensive and easily interpretable form [13].
|
|
| (a) |
Figure 2. (a) Pseudo-color image of a graphite surface using directional illumination of a 3D surface. Pseudo-color displays height: Higher areas are red and lower areas are blue. From this particular viewpoint, specular reflexion reveals a regular pattern of diagonal stripes caused by layers of graphite sheet poking out of the surface. Reprinted with permission from [7], R. M. Taylor and M. Falvo, " pearls Found on the Way to the Ideal Interface for Scanned-Probe Microscopes, " IEEE Visualization Conference, (1997). © 1997, IEEE. (b) 3D VR topology can be built and displayed to the user. Reprinted with permission from S. Horiguchi et al., " Virtual Reality User Interface for Teleoperated Nanometer Scale Object Manipulation, Proceedings of the 7th International IEEE Workshop on Robot and Human Communication, " ROMAN'98, Takamatsu, Japan, 1998, pp. 142-147. © 1998, IEEE.
| 5 5 |
Virtual Reality and Haptics in Nano- and Bionanotechnology
2. 2. 2. Poor Feeling of Handling Forces
The lack of direct 3D vision feedback from the nanoworld, and the fragility of the tele-manipulated nano-objects, make real-time force feedback an absolute necessity of the macro-to nanoworld interface. Indeed it is primordial to better understand the condition of the gripper during operation. An excessive force applied on a nano-object may lead to a non-negligible degree of probe or object deformation and may destroy the nano-object or make it flip away. A real-time capable force feedback is indispensable during teleoperated nanomanipulation.
2. 2. 2. 1. Force Sensing at the Nanoscale Very small gripping and contact forces in the range of 0. 1 up to 200 fiN and more have to be sensed with nano-Newton resolution. Only a few results can be found in literature about the use of AFM-based force sensors in other fields than scanning probe microscopy. Only Refs. [8] and [14] report on the application of these sensors: Either they are integrated into a microgripper that works under a light microscope, or they serve simultaneously as a manipulator and sensor for teleoperated nanohandling in SEM. The cantilever serves as a force transducer. In AFM, not only the force normal to the surface but also forces parallel to it have to be considered; therefore, the response of the cantilever to all three components has to be analyzed. In principle, the cantilever can be approximated by three springs—one in each direction of space. The force acting on the tip causes deflection of these springs. To measure the forces acting on the AFM tip, different measurement methodologies are used. The cantilever deflection can be measured using a laser beam and a photo detector system. Depending on the cantilever, forces ranging from a few pico-Newtons to several micro-Newtons can be measured. Forces can be measured in the normal and the lateral direction (Fig. 3 depicts the geometry for lateral force measurements). The cantilever can be considered as an elastic spring, and the force exerted on the sample is simply given by Hooke's law
Fn = kn8z
(1)
where Fn is the pseudo normal force, kn is spring constant of the cantilever (kn = Ewt3/4L3 where E is the Young's modulus), and 8Z is the deflection. Once the deflection and spring constant are known, the normal force can be calculated immediately. Suppose 3D forces (Fx, Fy, F2) are applied to the tip. These forces result in 3D torques (тх, ту, т2) relative to point O:
Fyh
-F2l - Fxh
Fl
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|