ІІІ-ІV і на 1-й стадії 2-х стадійного будівництва доріг ІІ категорії
Перехідне
З щебінки та гравію, з місцевих
неміцних камінних матеріалів
оброблених в’яжучими речовинами
ІV і V на першій стадії 2-х стадійного будівництва
доріг ІІІ категорії
Низьке
З грунтів, укріплених або
покращених спеціальними добавками
V і на першій стадії двохстадійного будівництва доріг ІV категорії
6.3 Елементи дороги
6.3.1 Поперечний профіль дороги
Для характеристики основних елементів дороги використовуються такі поняття, як поперечний профіль дороги, план траси і поздовжній профіль дороги.
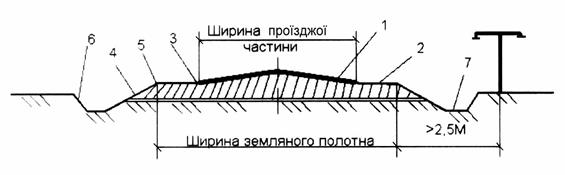
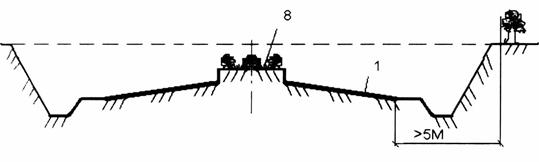
Поперечним профілем називають розріз дороги площиною перпендикулярною до її осі. На поперечному профілі зображується земляне полотно дороги і його конструктивні елементи, як це показано на рисунках 6.2 і 6.3. Позиції на рисунках означають: 1) проїжджа частина – смуга призначена для руху транспортних засобів, яка, як правило, має дорожній одяг (покриття); 2) узбіччя – підвищує міцність краю дорожнього одягу і забезпечує безпеку руху; 3) кромка – крайня лінія, яка розділяє проїжджу частину і узбіччя; 4) укіс внутрішній; 5) бровка – лінія, яка розділяє обочину і внутрішній укіс; 6) укіс зовнішній; 7) бокова канава (кювет), яка призначена для осушування дороги і відведення від неї води (див. рис. 6.2); 8) роздільна смуга (див. рис. 6.3).
Рисунок 6.2 – Поперечний профіль автомобільної дороги
Рисунок 6.3 – Поперечний профіль дороги з роздільною смугою
Проїжджа частина, як правило, має не менше двох смуг руху. Частина проїжджої частини, яку займають автомобілі, що рухаються один за другим та в одному і тому ж напрямку, називається смугою руху. Роздільну смугу, шириною не менше 5м, влаштовують на дорогах І-ї категорії, щоб унеможливити виїзд на смугу зустрічного руху.
Поперечний профіль дороги, яка проходить через населені пункти, має свої конструктивні особливості. Зокрема, міська вулиця, крім проїжджої частини для руху транспортних засобів, має тротуари для пішоходів, зелені насадження (смуги) для ізоляції пішоходів і забудов від вуличного руху, трамвайні колії розміщені в межах проїжджої частини або на окремій смузі. Під вулицею розміщують підземні комунікації: кабелі електричного струму; телефонно-телеграфні лінії; водопровід, газопровід, каналізацію і т.д.
Ширину смуги встановлюють залежно від швидкості руху і габаритної ширини автомобілів. Недостатня ширина смуги не забезпечує безпеки руху з розрахунковими швидкостями, надлишкова – збільшує вартість дороги. Кількість смуг (4...6) на дорогах І-ї категорії встановлюється залежно від інтенсивності руху і рельєфу місцевості. Основні параметри проїжджої частини
і земляного полотна автомобільних доріг різних категорій наведені в таблиці 6.5.
Таблиця 6.5 – Ширина дороги залежно від категорії
Категорія дороги
Кількість смуг руху
Ширина, м
смуги руху
проїжджої частини
обочини
земляного
полотна
І
3,75
15,0
3,75
27,5
ІІ
3,75
7,5
3,75
15,0
ІІІ
3,5
7,0
2,5
12,0
ІV
3,0
6,0
2,0
10,0
V
–
4,5
1,75
8,0
6.3.2 План траси
Автомобільна дорога складається з прямих дільниць, з’єднаних кривими, що забезпечують плавний перехід автомобіля з однієї прямої на іншу. Графічне зображення проекції дороги на горизонтальну площину називається планом траси.
Криволінійні дільниці, особливо з малими радіусами погіршують умови руху автомобілів оскільки ускладнюється керування автомобілем. При русі по кривій виникає відцентрова сила, яка намагається змістити автомобіль.
Для безпеки (збільшення видимості) та зручності руху криві дільниці доріг проектують з максимально можливими радіусами. Радіуси в плані рекомендуються: 3000м і більше – для доріг І-ї категорії; 2000м і більше – для решти. При таких радіусах вплив відцентрової сили невеликий для розрахункової швидкості і немає потреби ускладнювати конструктивні елементи дороги. Натомість, призначати великі радіуси не завжди можливо, тому при техніко-економічному обгрунтуванні допускається приймати мінімально допустимі радіуси кривих у плані (див. табл 6.6).
Таблиця 6.6 – Рекомендовані мінімальні радіуси кривих дороги в плані
Категорія дороги
І
ІІ
ІІІ
ІV
V
Найменший радіус, м
Для забезпечення зручності і безпеки руху автомобіля з розрахунковою швидкістю при радіусах кривих менше 3000м на дорогах І-ї категорії і менше 2000м на дорогах решти категорій, влаштовують віраж – односкатний поперечний профіль з нахилом проїжджої частини в напрямку центра кривої по всій її довжині 20‰...60‰, а там, де буває часто ожеледиця, – до 40‰.
Радіус кривої R (м), який забезпечував би безпечний рух автомобіля при розрахунковій швидкості V (км/год), можна визначити за формулою:
де φу – коефіцієнт поперечного зчеплення (для несприятливих умов руху);
ів – поперечний уклон проїжджої частини у проміле (уклон віража).
На рівній місцевості за відсутності суттєвих перешкод дорога може бути прокладена прямолінійними дільницями довжиною в декілька кілометрів. Однак довжина прямих не повинна перевищувати 4...4,5 км, позаяк рух по довгих прямих дільницях зв’язаний з прогресивною втомою і зниженням уваги у водіїв вантажних автомобілів, які рухаються повільно, а водіїв легкових автомобілів – з втратою контролю за швидкістю, що являється причиною підвищеної аварійності.
6.3.3 Поздовжній профіль дороги
Поздовжнім профілем дороги називається умовне зображення розрізу дороги вертикальною площиною, що проходить через її вісь. У поздовжньому профілі автомобільна дорога складається з окремих дільниць з підйомами або спусками і рідше з горизонтальних дільниць.
Крутизна підйому або спуску дільниці дороги характеризується відношенням різниці h відміток перевищення між крайніми точками полотна дороги А і В до віддалі l між ними (див. рис. 6.4). Ця величина називається поздовжнім уклоном “і”. Він визначається як тангенс кута нахилу проектної лінії дороги до горизонту:
i=h/l=tgα.
Уклон дороги позначається:
– у відсотках (%) на 100м дільниці;
– у проміле (‰) на 1000м дільниці;
– у десяткових дробах з точністю до тисячних.
Залежність кількості ДТП від величини поздовжнього уклону показана на рисунку 6.5.
Рекомендований поздовжній уклон не повинен перевищувати 30‰. В тих випадках, коли за умовами рельєфу місцевості цю вимогу виконати не вдається, виходячи з розрахункових швидкостей руху, поздовжні уклони можуть бути збільшеними. Наприклад, для швидкості руху 100км/год – це 50‰, для 60км/год – 70‰ і т.д.
Вертикальні криві проектують таким чином, щоб забезпечити: 1) безпеку; 2) комфортність руху без зниження пропускної здатності дороги. Це досягається застосуванням кривих змінного радіуса, що, у свою чергу, забезпечує безпечну розрахункову швидкість руху за умов геометричної видимості, при обгоні або екстреному гальмуванні. Для вгнутих вертикальних кривих віддаль видимості розраховують при включених фарах. Найменші (мінімальні) радіуси випуклих і вгнутих кривих залежно від розрахункових швидкостей руху автомобіля наведені в таблиці 6.7.
Таблиця 6.7 – Залежність радіусів кривих дороги від швидкості руху
Розрахункова швидкість руху, км/год
Найменші радіуси випуклих кривих, км
2,5
Найменші радіуси вгнутих кривих, км
1,5
Втрата видимості на випуклих переломах викликає необхідність застосування вертикальних кривих із збільшеним радіусом, ніж на вгнутих, де вибір радіуса кривої проходить за умовою забезпечення плавності руху. Як відзначав професор В. Ф. Бабков, найбільш високі транспортно-експлуатаційні якості, пропускна здатність і безпека руху можуть бути забезпечені тільки при видимості не менше 700м. Переважна більшість водіїв бачать зустрічні автомобілі на віддалі до 1500м.
6.4 Оцінка безпеки автомобільних доріг і вулиць
Для оцінки рівня безпеки дороги застосовується ряд показників, зокрема показник відносної аварійності, коефіцієнт безпеки, коефіцієнт аварійності та інші.
Відносна аварійність – це показник, що характеризує рівень аварійності на дорозі і дозволяє оцінити степінь небезпеки окремих її ділянок. Відносна аварійність може визначатися на 1 млн кілометрів пробігу:
або за певний період:
,
де nДТП – кількість ДТП на ділянці дороги за розрахунковий період;
N – інтенсивність руху автомобілів в обох напрямках на ділянці дороги за розрахунковий період;
l – довжина ділянки дороги;
∑L – сумарний пробіг автомобілів на ділянці дороги за розрахунковий період.
Коефіцієнт безпеки Кδ – це відношення швидкості, яка забезпечується тією чи іншою ділянкою дороги до найбільш можливої швидкості в’їзду на неї з попередньої ділянки:
,
де V – швидкість, що забезпечується даною ділянкою дороги виходячи з безпеки руху;
Vвх – максимальна швидкість, з якою транспортний засіб може в’їхати на дану ділянку.
Для оцінки безпеки окремих ділянок доріг використовується шкала, наведена в таблиці 6.8.
Коефіцієнт аварійності Кі – показник, який застосовується для виявлення небезпечних ділянок доріг з різними комбінаціями умов руху. Він визначається як відношення кількості ДТП на 1млн км сумарного пробігу транспортних засобів на якій-небудь ділянці дороги до кількості ДТП на еталонній, тобто горизонтальній прямолінійній ділянці з рівним шорстким покриттям шириною 7,5м і закріпленими обочинами шириною 2,5...3,0м на відкритій місцевості.
Таблиця 6.8 – Ступінь безпеки дороги залежно
від величини коефіцієнта безпеки Кδ
Ділянка дороги
Кδ
безпечна
0,8...1,0
малобезпечна
0,7...0,8
небезпечна
0,6...0,7
дуже небезпечна
менше 0,6
Підсумковий коефіцієнт аварійності Кав є добутком окремих коефіцієнтів аварійності, що характеризують вплив різних елементів плану і поздовжнього профілю дороги, ширини і стану її проїжджої частини, інтенсивності руху тощо, та визначається за формулою:
,
де К1 – коефіцієнт аварійності, що враховує вплив інтенсивності руху;
К2 – коефіцієнт аварійності, що враховує вплив кількості смуг руху;
К3 – коефіцієнт аварійності, що враховує вплив ширини проїжджої частини;
К4 – коефіцієнт аварійності, що враховує вплив ширини обочини;
К5 – коефіцієнт аварійності, що враховує віддалі видимості в плані;
К6 – коефіцієнт аварійності, що враховує поздовжній нахил дороги;
К7 – коефіцієнт аварійності, що враховує радіус кривих в плані;
К8 – коефіцієнт аварійності, що враховує коефіцієнт зчеплення φ і т.д.
Значення коефіцієнтів К1, К2, К3 ... Кі встановлюються на основі аналізу статистики ДТП.
Ділянки доріг, для яких Кав≤10, рахуються задовільними за умовами безпеки руху. Це стосується і нових доріг при їх проектуванні. При Кав=10...20 рекомендується розмітка проїжджої частини, яка забороняє обгін з виїздом на зустрічну смугу. При Кав=20...40 встановлюються знаки, які обмежують швидкість і забороняють обгін. Ділянки доріг, для яких Кав>40, вважаються дуже небезпечними, і їх необхідно реконструювати.
Підсумковий коефіцієнт аварійності можна визначити: 1) на основі технічної документації на дорогу (її окремих ділянок), що проектується; 2) на основі лінійного графіка ділянки дороги, що експлуатується з врахуванням інтенсивності руху. Існує також залежність між підсумковим коефіцієнтом Кав і відносною аварійністю Ка, що дає можливість прогнозувати кількісно рівень аварійності на дорозі (див. рис.6.6).
4.5 Утримання і облаштування доріг
6.5 Утримання і облаштування доріг
Клімат, метеорологічні умови, руйнівні дії транспортних засобів – це фактори, які погіршують властивості автомобільної дороги як інженерної споруди, знижуючи тим самим ефективність і безпеку дорожнього руху. Особливо важливим завданням підвищення безпеки руху є усунення ковзкості покриття, тобто збільшення коефіцієнта φ.
У процесі експлуатації шорсткість покриття знижується в результаті стирання кам’яних матеріалів під дією шин. Крім того, зменшення коефіцієнта зчеплення відбувається також у результаті дії атмосферних опадів, забруднення дорожнього покриття. Як наслідок, росте гальмівний шлях, збільшується ймовірність виникнення ДТП.
Для збереження високого значення коефіцієнта φ передбачають такі заходи:
– здійснюють підігрів покриття парою або електричним струмом;
– застосовують дренажні покриття;
– збільшують розміри гравію для поверхневої обробки;
– застосовують фрикційні матеріали;
– використовують спеціальний рисунок протектора;
– встановлюють антиблокувальні пристрої в гальмівних системах автотранспортних засобів.
Нерівність дорожнього покриття за даними ДАІ являється причиною 13...18% ДТП. Характер виникнення пригод полягає в необхідності екстреного гальмування або маневру в плані чи виконання обох цих дій, а значить створення небезпечної ситуації.
Нерівності викликають також коливання підвіски, що може призвести до втрати керованості. Коливання причепів і напівпричепів автопоїздів призводить до збільшення динамічного коридору руху. Окрім того, наявність нерівностей на дорогах підвищує втомленість водіїв, відволікає їхню увагу від сприйняття інших об’єктів на дорозі.
Єдиним ефективним методом боротьби з нерівностями дорожнього покриття є, крім якісного будівництва, своєчасний його ремонт.
Значна кількість ДТП в нічний час доби пояснюється різким погіршенням зорового сприймання об’єктів інформації при русі. Щоб покращити умови сприймання в темні години, виконують такі роботи:
– виготовляють дорожнє покриття із світлих матеріалів;
– взаємно віддаляють зустрічні транспортні потоки або організовують односторонній рух;
– встановлюють протиосліплюючі екрановані пристрої на роздільній смузі;
– роблять дорожню розмітку з світлоповертаючої фарби з рефлектуючими елементами;
– влаштовують штучне освітлення;
– встановлюють дорожні блоки з рефлекторними поверхнями або з освітленням.
Значна кількість ДТП відбувається у результаті з’їзду транспортних засобів з дороги, наїздів на різного роду опори, інші об’єкти на придорожній смузі. Для зниження важкості наслідків подібних ДТП проводять такі заходи:
а) влаштовують плавні відкоси, щоб була можливість з’їхати з дороги;
б) забороняють монтаж на придорожній смузі масивних конструкцій;
в) встановлюють в місцях підвищеної небезпеки ударобезпечні огорожі, конструкція яких має відповідати таким вимогам:
– виключати можливість виникнення значних сповільнень і деформацій транспортного засобу;
– виключати перекидання або відкидання транспортного засобу в потік;
– візуально попереджати водія про межі і характер небезпечної зони.
Залежно від вирішення завдання огорожі можуть бути:
– жорсткими, призначеними тільки для відхилення траєкторії руху;
– гнучкими, які поглинають частину енергії удару і змінюють траєкторію;
– деформуючими, що поглинають енергію удару.
Ремонтні роботи проїжджої частини вулиць і доріг створюють зони підвищеної небезпеки і значно знижують ефективність транспортного процесу. Для зменшення негативних наслідків при проведенні ремонтних робіт необхідно здійснити такі заходи:
– провести замір основних характеристик транспортного потоку (інтенсивність, склад, швидкість) і визначити можливість його проходження через ремонтну дільницю;
– визначити можливі маршрути об’їзду або передбачити спеціально обладнаний тимчасовий об’їзний маршрут;
– забезпечити завчасну та вичерпну систему інформування всіх учасників руху;
– забезпечити проїзд ділянки дороги, що ремонтується з необхідним обмеженням швидкості передбачивши встановлення необхідних засобів організації і регулювання руху;
– встановити огорожі біля небезпечних місць з обов’язковим обладнанням їх світлоповертаючими елементами і ліхтарями.
ТЕМА 7. ОСНОВИ ОРГАНІЗАЦІЇ ДОРОЖНЬОГО РУХУ
7.1 Параметри, що характеризують дорожній рух
Під організацією дорожнього руху розуміють комплекс наукових, інженерних і організаційних заходів, які забезпечують необхідний рівень ефективності та безпеки транспортного і пішохідного руху.
Дорожній рух характеризується такими параметрами:
– інтенсивність;
– щільність;
– швидкість;
– склад;
– затримки;
– розподіл транспортного потоку по напрямках.
Інтенсивність руху Na – це кількість транспортних засобів, які проходять через січення дороги х–х протягом заданого проміжку часу (див. рис 7.1). Залежно від задачі, що вирішується, періодом визначення інтенсивності руху може бути рік, місяць, доба, година та інші проміжки часу. Інтенсивність руху – величина, нерівномірна і в просторі, і в часі.
Щільність дороги q – це кількість транспортних засобів, що знаходяться в даний момент часу на заданій ділянці дороги х1–х2 (див. рис. 7.1). Величина q характеризує завантаження дороги. Максимальне значення щільності q відповідає кількості нерухомих транспортних засобів розташованих впритул один до одного. Для легкових автомобілів це значення дорівнює 200 одиниць/км, для автопоїздів довжиною 24 м – 40 одиниць/км.
Швидкість V визначається як відношення пройденої дільниці дороги x1– x2 (див. рис.7.1) до проміжку часу t, за який ця дільниця пройдена. В практиці організації дорожнього руху застосовують такі швидкості: миттєва, сполучення, експлуатаційна, транспортного потоку та інші.
Миттєва швидкість характеризується миттєвим, фіксованим значенням Va у певному січенні дороги. Швидкість сполучення Vс визначається як відношення віддалі між пунктами сполучення на маршруті до часу знаходження транспортного засобу на ньому.
Експлуатаційна швидкість Vе визначається відношенням пройденої відстані до всього часу знаходження транспортного засобу на маршруті, включаючи час, пов’язаний з технологією перевезень (навантаження, розвантаження тощо). Швидкість транспортного потоку Vп – це середня швидкість руху транспортних засобів на певному відрізку шляху за певний проміжок часу.
Склад транспортного потоку характеризується співвідношенням у ньому транспортних засобів різного типу. Вплив їх руху на завантаження дороги здійснюється за допомогою динамічного габариту D, що являє собою відрізок дороги, мінімально необхідний веденому автомобілю за умовами безпеки руху при екстреному гальмуванні автомобіля, який рухається попереду (див. рис.7.2).
Зрозуміло, що різні транспортні засоби по-різному впливають на формування і характеристики транспортного потоку. Щоб врахувати цей вплив, використовуються коефіцієнти приведення Kn, які визначаються відношенням динамічного габариту транспортного засобу даного типу до динамічного габариту легкового автомобіля. Коефіцієнти дозволяють фактичну інтенсивність транспортного потоку подати у вигляді умовної (приведеної) Nп, яка відповідає потокові легкових автомобілів. Для різних транспортних засобів вони мають такі значення:
– легкові автомобілі, Кпл = 1,0;
– мотоцикли, Кпм= 0,15...0,5;
– вантажні автомобілі, Кпв=1,5...3,5;
– автопоїзди, Кпап=3,5...6,0.
Таким чином, приведена інтенсивність транспортного потоку буде визначатися за формулою:
і т. д.,
де Nл – інтенсивність руху транспортного потоку легкових автомобілів;
Nв – інтенсивність руху транспортного потоку вантажних автомобілів;
Nм – інтенсивність руху транспортного потоку мотоциклів;
Nап – інтенсивність руху транспортного потоку автопоїздів;
Затримки руху характеризуються втратою часу при проходженні транспортним засобом заданого відрізка шляху зі швидкістю нижче оптимальної і визначаються за формулою:
,
де Uф – фактична швидкість;
UО – оптимальна швидкість;
l1, l2 – точки дільниці дороги, що розглядається.
Оптимальною швидкістю в даному випадку слід вважати швидкість сполучення, яка забезпечує мінімум втрат часу, пального, витрат, пов’язаних зі зношуванням автомобіля, втрат від ДТП тощо.
У зв’язку з важкістю визначення дійсного значення оптимальної швидкості в практиці організації руху умовно, в якості оптимальної, приймають дозволену (розрахункову з умови безпеки) швидкість на даній дільниці дороги.
Розрізняють затримки двох типів: 1) на перегонах; 2) на пересіченнях. Затримки на перегонах являються результатом маневрування, наявності в потоці автомобілів, що рухаються з невеликими швидкостями, руху пішоходів, наявністю зупинок і стоянок транспортних засобів, при перенасиченні потоку. Затримки на пересіченнях являються результатом необхідності пропуску транспортних і пішохідних потоків у пересічних напрямках.
Розподіл транспортних потоків, що проходить у різних напрямках, характеризується зниженням середньої швидкості та виникненням конфліктних ситуацій в конфліктних точках – місцях, де пересікаються, зливаються чи розділяються траєкторії руху потоків. Види конфліктних точок показані в таблиці 7.1.
Для порівняльної оцінки складності і потенційної небезпеки пересічень застосовують показник складності, який визначається за формулою:
m = nв+3nз+ 5nпр,
де nв – кількість конфліктних точок відхилення;
nз – кількість конфліктних точок злиття;
nпр – кількість конфліктних точок пересічення.
Таблиця 7.1 – Види конфліктних точок
Вид маневру
Схеми взаємодії потоків
Відхилення
Злиття
Пересічення
Якщо m<40, то вузол вважається простим, якщо 40<m<80, то – середньої складності, якщо 80<m<150, то вузол складний і якщо m>150, то дуже складний. Подібна оцінка дещо спрощена і дає лише приблизне уявлення про небезпеку пересічень.
На рисунку 7.2 показані конфліктні точки на нерегульованому перехресті з двома смугами руху.
7.2 Поняття про пропускну здатність дороги
Важливим критерієм, який характеризує функціонування шляхів сполучення зокрема, автомобільних, є пропускна здатність дороги. Найпростіше визначення поняття пропускної здатності дороги зводиться до того, що під цією величиною розуміють максимально можливу кількість автомобілів, яка може пройти через січення дороги за одиницю часу. Однак це не зовсім правильно, оскільки, розглядаючи рух автомобілів і оцінюючи границі можливої інтенсивності потоку характеризується, по суті, не дорога, а система ВАДС. Так, наприклад, формування потоку, однотипними автомобілями, які наділені однаковими тяговими і гальмівними властивостями, збільшує пропускну здатність дороги.
Пропускна здатність дороги також може бути збільшена в результаті покращення дорожніх умов і підвищення кваліфікації водіїв. Зокрема, якщо замінити людину-водія повністю автоматичною системою керування, то пропускна здатність може бути збільшена в 3...4 рази. Разом з тим вона зменшується при великих дощах, туманах, снігопадах. Тому під терміном “пропускна здатність дороги”, по суті, має розумітися пропускна здатність системи ВАДС, а саме: пропускна здатність дороги – це максимальна кількість автотранспортних засобів, які можуть пройти по відрізку дороги протягом встановленого проміжку часу при забезпеченні заданої швидкості і безпеки руху.
Існує дві оцінки пропускної здатності дороги:
1) на перегоні;
2) на пересіченні доріг в одному рівні.
У першому випадку транспортний потік при великій інтенсивності може вважатися безперервним. Характерною особливістю другого випадку є періодичні розриви потоку для перепуску автомобілів, що проїжджають в пересічних напрямках.
Пропускна здатність однієї смуги проїжджої частини на перегоні в ідеальних умовах розраховується за такою формулою
, автомобілів/год,
де Va – швидкість автомобіля, м/с;
d – дистанція безпеки, м;
la – габаритна довжина автомобіля, м;
D – динамічний габарит автомобіля, м.
У загальному випадку розрахункова пропускна здатність дороги Рр може бути визначена за допомогою коефіцієнтів, якими беруться до уваги різні умови руху
Рр =Р× x1× x2× x3×…×xn, автомобілів/год,
де x1, x2, x3…xn - коефіцієнти, які враховують склад потоку, кількість смуг, уклони, стан покриття і т.д.).
Розрахункова пропускна здатність багатосмугової міської магістралі Рм обчислюється за формулою
Рм = Р× n× ε× α, автомобілів/год,
де n – кількість смуг руху;
ε=0,66...1,0 – коефіцієнт, що враховує кількість смуг руху (чим більша їх кількість тим меншим приймається коефіцієнт ε);
α = 0,9 – коефіцієнт, що враховує вплив пересічень.
7.3 Дослідження дорожнього руху
Дослідження характеристик дорожнього руху, а також дорожніх умов (геометричні елементи і технічний стан дороги, її обладнання і облаштування) проводять з метою одержання фактичних даних про рух транспортних і пішохідних потоків і перевірки умов забезпечення безпеки дорожнього руху.
Залежно від способу отримання необхідної інформації методи дослідження характеристик і умов дорожнього руху можна розділити на три основних групи і кілька підгруп:
а) документальне вивчення;
– аналіз планових і звітних даних про перевезення;
– анкетні обстеження;
– аналіз статичних матеріалів про ДТП;
– вивчення проектно-технічної документації вулично-дорожньої сітки;
б) натурні дослідження;
– обстеження дорожніх умов;
– дослідження транспортних і пішохідних потоків;
в) моделювання руху;
– фізичне;
– математичне.
7.3.1 Документальне вивчення
Основною ознакою цього методу є вивчення матеріалу в кабінетних умовах, тому цей метод інколи називають ще камеральним. Документальне вивчення може здійснюватись як на базі спеціально зібраних даних, так і шляхом обробки існуючих і призначених для іншої мети матеріалів. Зокрема, досить докладно можна спрогнозувати транспортні потоки в зоні майбутнього крупного будівництва на основі вивчення проектних і планових матеріалів перевезень у відповідних організаціях.
Іншим прикладом може служити аналіз документів, що характеризують роботу маршрутного пасажирського транспорту, зокрема кількість проданих квитків у різних напрямках. За ними можна скласти характеристики руху рухомого складу, не проводячи безпосереднього спостереження.
Спеціальний збір матеріалів про розміри і напрямки перевезень часто здійснюють організацією анкетного обстеження. Типовим прикладом анкетного обстеження є опитування власників приватних автомобілів про величини і напрямки здійснюваних ними поїздок. Основним елементом такого обстеження є анкета, яка містить необхідний мінімум питань.
Вивчення картотеки обліку ДТП в ДАІ дозволяє провести їх всебічний аналіз і дати узагальнену характеристику причин і факторів, які сприяють виникненню ДТП без виїзду на місця пригод. Аналіз проектної документації на вулично-дорожню мережу, що є в наявності, дозволяє підготовити попередню характеристику доріг (ширина, кількість смуг, радіуси закруглень і т.д.), необхідних для розробки рішень щодо організації руху.
Як правило, документальні дані уточнюються або є початковим етапом натурних досліджень.
7.3.2 Натурні дослідження
Натурні дослідження полягають у фіксації конкретних умов і показників дорожнього руху, який фактично проходить протягом даного періоду часу. Натурні дослідження являються єдиним способом отримання достовірної інформації про стан доріг, дозволяють дати точну характеристику існуючих транспортних і пішохідних потоків.
Залежно від способу отримання і характеру інформації, натурні дослідження діляться на дві групи: 1) вивчення на стаціонарних постах; 2) вивчення за допомогою рухомих засобів.
Найбільш поширеним є спосіб дослідження (вивчення) на стаціонарних постах. Безпосередньо це може бути опитування, талонне обстеження, наклеювання спеціальних міток на транспортні засоби, запис номерних знаків. Суттєвим недоліком такого способу дослідження є висока трудомісткість і необхідність одночасної праці кількох спостерігачів.
При вивченні руху на стаціонарному посту отримувана інформація відноситься тільки до даної точки (січення) дороги. Щоб мати просторово-часову характеристику режимів руху по вулично-дорожній мережі, використовують рухомі засоби – пересувну лабораторію (автомобіль), вертоліт тощо. Широкого поширення набув метод дослідження за допомогою “плаваючого” автомобіля, тобто автомобіля, який рухається зі швидкістю, що характерна основній масі транспортних засобів у потоці.
Натурні дослідження характерних транспортних потоків на вулицях і дорогах дозволяють:
– виявити місця затримок на перегонах і пересіченнях;
– скоректувати режими роботи світлофорної сигналізації;
– ввести обмеження швидкостей;
– визначити зони заборони обгонів;
– виявити місця, де потрібно встановити дорожні знаки;
– виявити місця ДТП, зв’язані з порушенням швидкісного режиму або невідповідністю умов руху.
7.3.3 Моделювання руху
Моделювання руху полягає в штучному відтворенні процесу руху фізичними або математичними методами при допомозі ЕОМ. Як приклад фізичних методів моделювання можуть бути названі дослідження на різних макетах елементів дороги або випробовування на полігоні, де створюються штучні умови, що імітують реальний рух транспортних засобів. Простим прикладом фізичного моделювання є метод перевірки можливостей маневрування і паркування моделей автомобілів на площі, відтвореній у вигляді макета у зменшеному масштабі.
Більш прогресивним є математичне моделювання, засноване на математичному описові транспортних потоків. Дякуючи швидкодії ЕОМ, на яких здійснюється таке моделювання, можна у мінімальний термін провести дослідження впливу багатьох факторів і їх поєднання на зміну різних параметрів та отримати дані для оптимізації управління рухом, які часто неможливо зафіксувати при натурних дослідженнях.
В основу обчислюваного експерименту із застосуванням ЕОМ покладене поняття моделі об’єкта, тобто математичний опис, що відповідає даній конкретній системі і відбиває з необхідною точністю поведінку її в реальних умовах.
Обчислювальний експеримент дешевший, простіший ніж натурний, легко керується. Він відкриває шлях до вирішення великих комплексних проблем і оптимального розрахунку транспортних систем. Недолік обчислювального експерименту полягає в тому, що застосування його результатів обмежене рамками прийнятої математичної моделі, побудованої на основі закономірностей, отриманих з допомогою натурного експерименту.
7.4 Оперативна організація дорожнього руху
7.4.1 Завдання організації руху
Основним завданням організації дорожнього руху є розробка і здійснення заходів, які забезпечували б ефективність та безпеку транспортних і пішохідних потоків. До конкретних заходів, що вдосконалюють процес автомобільного руху, можна віднести:
– будівництво пересічень в різних рівнях;
– введення примусового регулювання на пересіченнях;
– заборона ліво- і правоповоротних маневрів, розворотів, обгонів;
– введення каналізованого руху, тобто примусового розподілу транспортних потоків по напрямках;
– заборона зупинок транспортних засобів;
– розміщення і обладнання необхідної кількості стоянок і пунктів зупинок;
– організація і облаштування доріг необхідними засобами інформації;
– віднесення поворотів і розворотів за межі перехрестя;
– розподіл потоків в просторі (додаткові смуги, паралельні дороги) і в часі (зміщення початку роботи, регулювання випуску автомобілів на лінію);
– диференціація смуг руху для легкових і вантажних автомобілів;
– виділення спеціальних смуг для пасажирського транспорту;
– організація одностороннього руху;
– заборона руху окремих видів транспорту в районі, магістралі, вулиці;
– забезпечення високого коефіцієнта зчеплення на дорозі (>0,4);
– обмеження швидкості руху;
– вирівнювання швидкісного режиму руху за допомогою обмеження верхньої і нижньої границі;
– виділення транзитного руху із загальноміських потоків;
– створення зон без транспорту та інші.
Необхідно відзначити, що втручання у транспортний потік у вигляді реалізації одного або декілька заходів може бути виправдане тільки у тому випадку, коли ефект на ділянці дороги буде отриманий не за рахунок втрат на іншій, сусідній ділянці.
7.4.2 Організація руху громадського транспорту
Існують такі види наземних транспортних засобів для громадських пасажирських перевезень: автобус; тролейбус;
 Крутизна підйому або спуску дільниці дороги характеризується відношенням різниці h відміток перевищення між крайніми точками полотна дороги А і В до віддалі l між ними (див. рис. 6.4). Ця величина називається поздовжнім уклоном “і”. Він визначається як тангенс кута нахилу проектної лінії дороги до горизонту:
Крутизна підйому або спуску дільниці дороги характеризується відношенням різниці h відміток перевищення між крайніми точками полотна дороги А і В до віддалі l між ними (див. рис. 6.4). Ця величина називається поздовжнім уклоном “і”. Він визначається як тангенс кута нахилу проектної лінії дороги до горизонту: Рекомендований поздовжній уклон не повинен перевищувати 30‰. В тих випадках, коли за умовами рельєфу місцевості цю вимогу виконати не вдається, виходячи з розрахункових швидкостей руху, поздовжні уклони можуть бути збільшеними. Наприклад, для швидкості руху 100км/год – це 50‰, для 60км/год – 70‰ і т.д.
Рекомендований поздовжній уклон не повинен перевищувати 30‰. В тих випадках, коли за умовами рельєфу місцевості цю вимогу виконати не вдається, виходячи з розрахункових швидкостей руху, поздовжні уклони можуть бути збільшеними. Наприклад, для швидкості руху 100км/год – це 50‰, для 60км/год – 70‰ і т.д.
 ,
, ,
, ,
,
 Швидкість V визначається як відношення пройденої дільниці дороги x1– x2 (див. рис.7.1) до проміжку часу t, за який ця дільниця пройдена. В практиці організації дорожнього руху застосовують такі швидкості: миттєва, сполучення, експлуатаційна, транспортного потоку та інші.
Швидкість V визначається як відношення пройденої дільниці дороги x1– x2 (див. рис.7.1) до проміжку часу t, за який ця дільниця пройдена. В практиці організації дорожнього руху застосовують такі швидкості: миттєва, сполучення, експлуатаційна, транспортного потоку та інші. Зрозуміло, що різні транспортні засоби по-різному впливають на формування і характеристики транспортного потоку. Щоб врахувати цей вплив, використовуються коефіцієнти приведення Kn, які визначаються відношенням динамічного габариту транспортного засобу даного типу до динамічного габариту легкового автомобіля. Коефіцієнти дозволяють фактичну інтенсивність транспортного потоку подати у вигляді умовної (приведеної) Nп, яка відповідає потокові легкових автомобілів. Для різних транспортних засобів вони мають такі значення:
Зрозуміло, що різні транспортні засоби по-різному впливають на формування і характеристики транспортного потоку. Щоб врахувати цей вплив, використовуються коефіцієнти приведення Kn, які визначаються відношенням динамічного габариту транспортного засобу даного типу до динамічного габариту легкового автомобіля. Коефіцієнти дозволяють фактичну інтенсивність транспортного потоку подати у вигляді умовної (приведеної) Nп, яка відповідає потокові легкових автомобілів. Для різних транспортних засобів вони мають такі значення: і т. д.,
і т. д., ,
,


 7.2 Поняття про пропускну здатність дороги
7.2 Поняття про пропускну здатність дороги , автомобілів/год,
, автомобілів/год,