- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
тактильные датчики; в, г- дальномеры; д- акселерометры.
тактильные датчики; в, г- дальномеры; д- акселерометры.
Делаем вывод, что даже для самых, казалось бы, простых задач
требуется серьезное техническое и программное оснащение робота. От функционального назначения робота будет зависеть и цена, поэтому при создании роботов требуется четко определится с функциями, которыми он будет обладать.
В современное время роботов можно разделить на три больших группы по типу решаемых задач (рисунок 1.4.).
Рисунок 1.4 – Классификация роботов по типу решаемых задач. Самой большой и используемой группой являются производственные 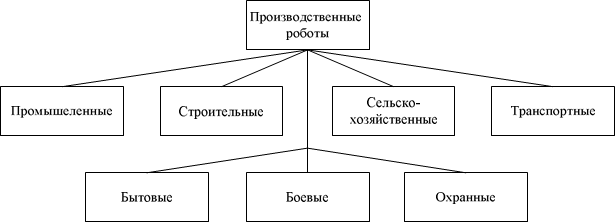
роботы. Эта группа роботов используется для выполнения тяжелой, монотонной, вредной и опасной физической работы. Их характерной чертой является наличие автоматических исполнительных устройств, таких как: манипуляторы, самоходные тележки и т.д. Так как это самая большая классификационная группа, то в ней можно провести классификацию по типу выполняемой работы (рисунок 1.5.).
Рисунок 1.5 – Классификация производственных роботов по типу
выполняемой работы.
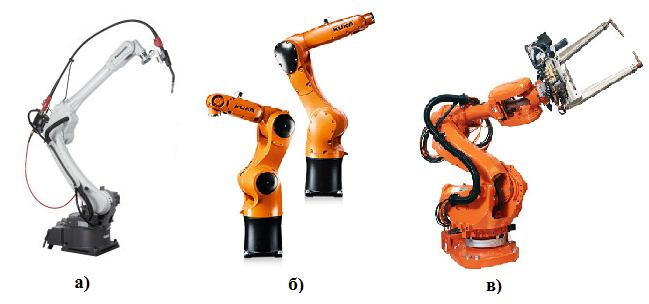
Промышленные роботы применяются для автоматизации различных
технологических процессов и операций по производству какой-либо продукции. Например, автоматизированная сварка (рисунок 1.6а), механическая обработка (рисунок 1.6б), сборка готовых изделий (рисунок 1.6в), резка металлов. Отрасли применения этих роботов очень обширны и включают в себя: машиностроение, приборостроение, автомобилестроение, нефтехимическую, металлургическую и атомную отрасли и другие.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|