- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Сферы применения и функции роботов
1.3 Сферы применения и функции роботов
Современный робот – это устройство, способное своими функциональными способностями заменить человека в какой-либо деятельности. На данном этапе развития, функциональный набор робота очень широк, и выбор из полного перечня возможностей именно тех функций, которые обеспечат эффективное выполнение определенного процесса – является одной из задач робототехники. Чтобы решить данную задачу и выбрать наиболее оптимальное техническое устройство, требуется сопоставить действия человека и робота, совершаемые при выполнении одних и тех же действий.
При анализе действий, можно найти заметное различие в сложности выполнения одного и того же действия роботом и человеком. Рассмотрим простой пример: требуется взять стакан со стола, поднести его к губам и выпить. Чтобы выполнить данное действие нужно: осмотреть стол и найти на нем стакан, наполненный водой; дотянуться вытянутой рукой до наполненного стакана; схватить стакан и удерживать его с такой силой, чтобы стакан не треснул; поднести стакан ко рту; приложить ко рту стакан; опрокинуть стакан; отвести стакан на стол и поставить его на стол, не разбив при этом. Человек с данной задачей справится, не задумываясь, одним плавным движением, ведь у него есть все для выполнения этой операции. Роботизирование данной
операции может вызвать некоторые трудности, связанные с выполнением всех вышеперечисленных операций [5].
Опишем то, что потребуется роботу для выполнения последовательности вышеперечисленных действий. Для выполнения первого действия, потребуется воспользоваться техническим зрением – для этого потребуется сенсор и алгоритм распознавания образов. При первой же операции, возникает проблема идентификации наполненного стакана из-за большого количества посторонних предметов. Чтобы выполнить вторую операцию, требуется использовать методы управления движением манипулятора робота, но, чтобы воспользоваться этими методами, нужно получить данные о расположении стакана в пространстве. Эти данные получаются от системы технического зрения. Стоит заметить, что сам по себе расчет траектории манипулятора представляет собой сложную задачу. Для четкого выполнения третьего действия, нужны датчики, реализующие осязательные функции человеческой руки – это датчик, фиксирующий касание предмета, а также датчик измерения силы, с которой давит кисть манипулятора на предмет (рисунок 1.3.). Для выполнения четвертой операции, потребуется рассчитать усиление, которое нужно приложить к стакану – это делается по данным идентификации объекта средствами технического зрения. Операция «поднести стакан ко рту» выполняется методами управления движением манипулятора робота, как при выполнении второго действия. При выполнении пятого действия требуется, чтобы все составные части робота обладали высокочувствительными силовыми датчиками (рисунок 1.3.). Также, движение манипулятора должно быть скорректировано, с изменением положения головы. Следующая операция, под номером шесть, является одной из самых простых и относится к классу задач управления движением манипулятора. В данной операции от робота требуется тщательно контролировать положение стакана, управлять углом наклона стакана и скоростью опрокидывания. При выполнении седьмой операции, нужно осуществить плавное опускание стакана на стол без резкого удара, также кисть манипулятора не должна разомкнуться 
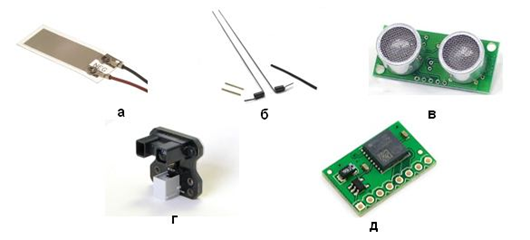
раньше, чем стакан коснется стола. Это операция требует наличия высокочувствительных тактильных и силовых датчиков (рисунок 1.3.).
Рисунок 1.3 – некоторые датчики, используемые в робототехнике: а, б-
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|