- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
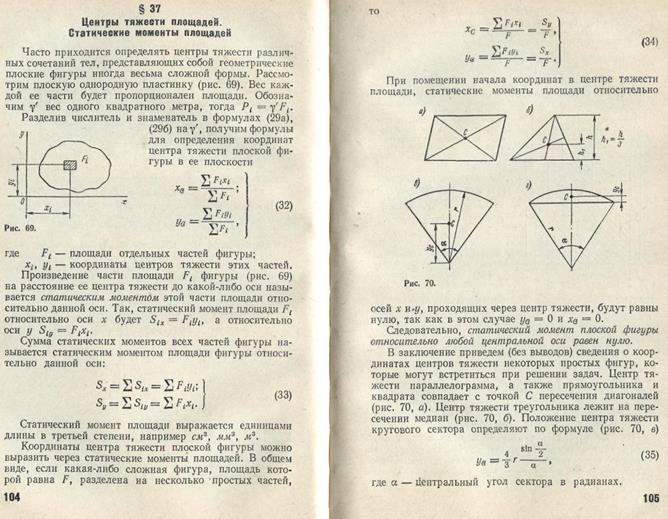
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Билет 5. я –проверка прочности
Билет 5
1 Принцип освобождаемости
Связями называют ограничения, налагаемые на положения и скорости точек тела в пространстве. Сила, с которой тело действует на связь, называется силой давления; сила, с которой связь действует на тело, называется силой реакции или просто реакцией. Согласно аксиоме взаимодействия, эти силы по модулю равны и действуют по одной прямой в противоположные стороны. Силы реакций и давлений приложены к различным телам и поэтому не представляют собой систему сил.
Силы, действующие на тело, делятся на активные и реактивные. Активные силы стремятся перемещать тело, к которому они приложены, а реактивные препятствуют этому перемещению. Принципиальное отличие активных сил от реактивных заключается в том, что значение реактивных сил, вообще говоря, зависит от значения активных сил, но не наоборот. Активные силы часто называют нагрузками.
При решении большинства задач статики несвободное тело условно изображают как свободное с помощью гак называемого принципа освобождаемости, который формулируется так: всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их реакциями.
В результате применения этого принципа получаем тело, свободное от связей и находящееся под действием некоторой системы активных и реактивных сил.
Направление реакций определяется тем, в каком направлении данная связь препятствует перемещению тела. Правило для определения направления реакций можно сформулировать так: направление реакции связи противоположно направлению перемещения, уничтожаемого данной связью.

 Если связи считать идеально гладкими, то во многих случаях можно сразу указать направление их реакций. Рассмотрим
Если связи считать идеально гладкими, то во многих случаях можно сразу указать направление их реакций. Рассмотрим
направление реакций основных видов связей, встречающихся в различных конструкциях.
1. 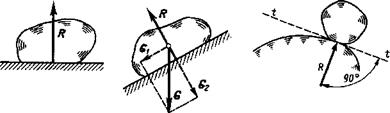 Идеально гладкая плоскость (рис. 1.11). В этом случае реакция R направлена перпендикулярно опорной плоскости в сторону тела, так как такая связь не дает телу перемещаться только в сторону опорной плоскости и перпендикулярно ей.
Идеально гладкая плоскость (рис. 1.11). В этом случае реакция R направлена перпендикулярно опорной плоскости в сторону тела, так как такая связь не дает телу перемещаться только в сторону опорной плоскости и перпендикулярно ей.
Если тело находится на наклонной плоскости, то, разложив силу тяжести G на две составляющие  и G2, параллельную и перпендикулярную опорной плоскости, можно видеть, что составляющая будет двигать тело вдоль плоскости, а составляющая G2 будет прижимать тело к плоскости и уравновешиваться реакцией R.
и G2, параллельную и перпендикулярную опорной плоскости, можно видеть, что составляющая будет двигать тело вдоль плоскости, а составляющая G2 будет прижимать тело к плоскости и уравновешиваться реакцией R.
2. Идеально гладкая поверхность (рис. 1.12). В этом случае реакция R направлена перпендикулярно касательной плоскости t — t, т. е. по нормали к опорной поверхности в сторону тела, так как нормаль есть единственное направление перемещения тела, которое не допускает данная связь.
3. Закрепленная точка или ребро угла (рис. 1.13, ребро В). В этом случае реакция Rв направлена по нормали к поверхности идеально гладкого тела в сторону тела, так как нормаль к поверхности тела есть единственное направление перемещения, которое не допускают эти связи.
4. Гибкая связь (рис. 1.13). Реакция R гибкой связи не дает телу лишь удаляться от точки подвеса и поэтому направлена вдоль связи от тела к точке подвеса. Из рис. 1.13 видно, что гибкая связь, перекину гая через блок, изменяет направление передаваемого усилия (натяжения нити).
В конструкциях широкое распространение имеют связи, которые называют шарнирами. Шарнир представляет собой подвижное соединение двух тел, допускающее только вращение вокруг общей оси (цилиндрический шарнир) или общей точки (шаровой шарнир).



2. РАСТЯЖЕНИЕ И
СЖАТИЕ
Растяжение (сжатие) – вид нагружения бруса, при котором в его поперечных сечениях возникает один силовой фактор - продольная сила N.
Δl= l1-l ε=Δl/l продольная деформация
F F d Δd=d-d1 εT=Δd/d поперечная деформация
d1 Если брус нагружен не 2-мя, а большим коли-
 чеством сил, направленные в противополож-
чеством сил, направленные в противополож-
 l ные стороны, то пользуются правилом:
l ные стороны, то пользуются правилом:
проекции внешних сил, направленных от се-
 l1 чения с + к сечению с -.
l1 чения с + к сечению с -.
Если в результате сложения получилось, что N>0, то растяжение, N<0 – сжатие.
Гипотезе Бернулли. Сечения плоские и ┴ оси бруса до растяжения (сжатия) остаются плоскими и ┴ оси бруса после растяжения (сжатия).




 F σ
F σ  N
N
σ – распределенное равномерно.
σ – нормальное напряжение
N - нормальная сила
А – площадь поперечного сечения стержня.
 - коэффициент Пуассона.
- коэффициент Пуассона.
εT и ε –деформации
μ – зависит от материала
μ = 0 – пробка
μ = 0,5 – резина
μ = 0,25÷0,33 – сталь.
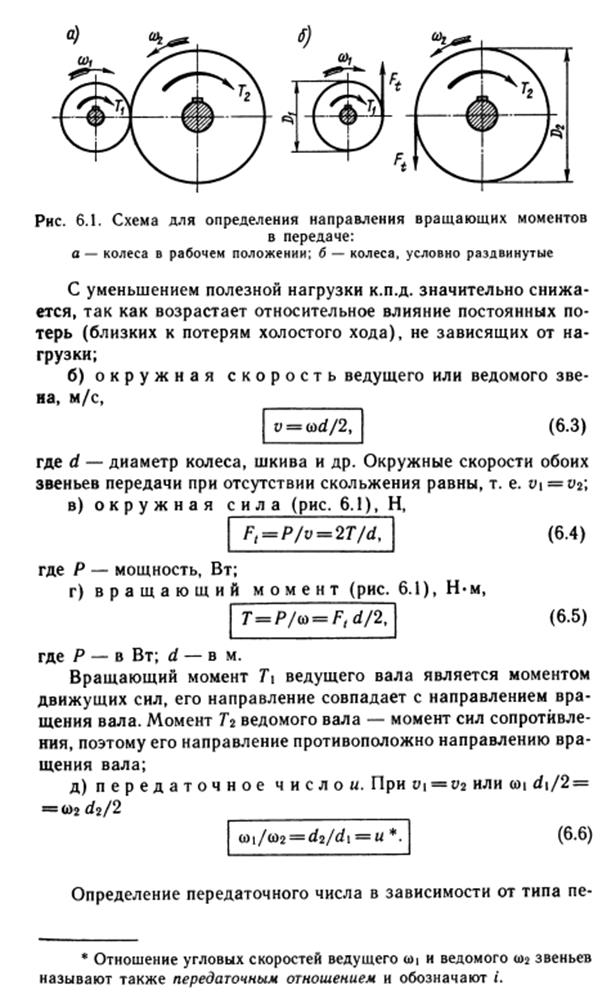
3 ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Классификация передач и их назначение
Наиболее распространенными являются передачи вращательного движения. Это объясняется существенным преимуществом вращательного движения по сравнению с движением возвратнопоступательным. В последнем случае имеют место потери времени на холостые ходы (вперед — рабочий ход назад — холостой), а также большие динамические нагрузки, связанные е изменениями направления движения, что ограничивает увеличение рабочих скоростей машин.
Нецелесообразность, а иногда невозможность прямого соединения двигателя и машины объясняется следующими факторами: несовпадением их скоростей (двигатели обычно имеют большие угловые скорости, что позволяет делать их компактными, в рабочих же органах машин-орудий часто требуется большой момент при относительно небольших скоростях);
необходимостью изменять скорость машины при постоянной скорости выбранного двигателя;
необходимостью в ряде случаев одним двигателем приводить в движение несколько механизмов.
В современных машинах применяют механические, гидравлические, пневматические и электрические передачи. В данном разделе рассматриваются только детали механических передач.
Механические передачи классифицируют по следующим признакам:
по физическим условцям передачи движения: трением (фрикционные, ременные, канатные); сцеплением одного звена с другим (зубчатые, червячные, цепные);
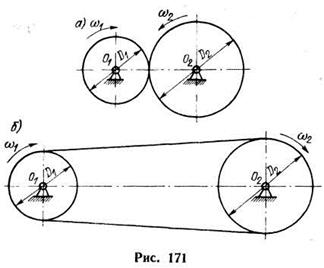
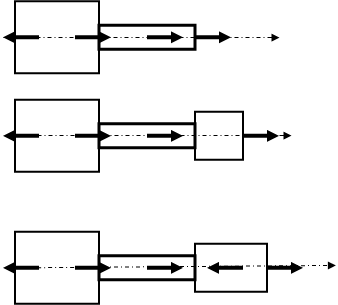
по способу соединения ведущего и ведомого звеньев: передачи с непосредственным касанием ведущего и ведомого звеньев (рис. 171, а)—фрикционные, зубчатые, червячные; передачи с промежуточным звеном, соединяющим ведущее и ведомое звенья (рис. 171, б) — ременные, канатные, цепные.
В каждом передаточном механизме различают два основных звена: ведущее и ведомое. Между ведущим и ведомым звеньями в многоступенчатых передачах размещаются промежуточные звенья.
Билет 6
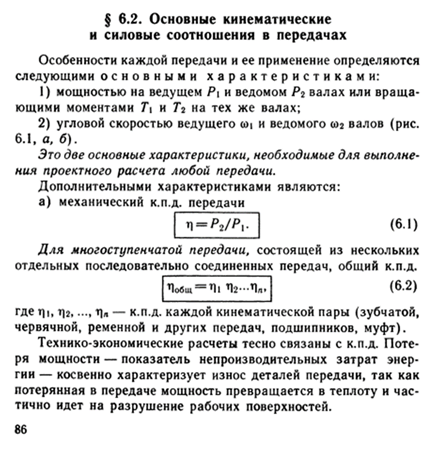
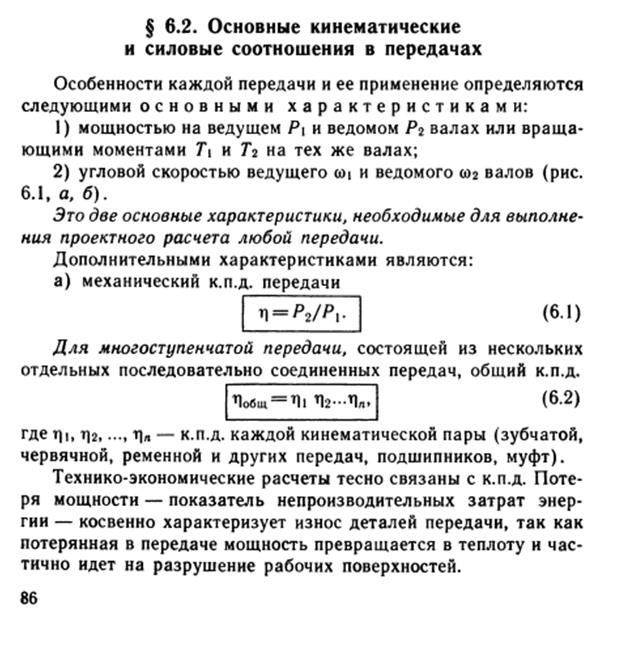
1 § 6.1. Понятие о трении
Абсолютно гладких и абсолютно твердых тел в природе не существует, и поэтому при перемещении одного тела по поверхности другого возникает сопротивление, которое называется трением. Трение — явление сопротивления относительному перемещению, возникающего между двумя телами в зонах соприкосновения поверхностей по касательной к ним.
Трение—явление, чрезвычайно распространенное в природе и имеющее большое значение. На трении основана работа ременных и фрикционных передач, тормозных устройств, прокатных станов, наклонных транспортеров, фрикционных муфт и т. п. Трение обеспечивает сцепление с землей и, следовательно, работу автомобилей, тракторов и других транспортных машин. При отсутствии трения человек не мог бы ходить. Наряду с этим трение во многих случаях является вредным сопротивлением, на преодоление которого затрачивается нередко весьма большое количество энергии. Эти затраты энергии бесполезны и их стремятся уменьшить.
Приводим схему классификации трения по наличию и характеру движения.
Трением покоя называется трение двух тел при предварительном смещении, т. е. при малом относительном перемещении тел до перехода от покоя к относительному движению.
Трением движения называется трение двух тел, находящихся в относительном движении.
Далее рассмотрим виды трения в зависимости от наличия и характера относительного движения.
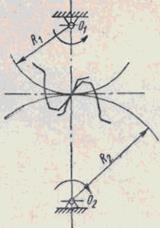
Если коэффициент трения скольжения одинаков для всех направлений движения, то множество (геометрическое место) полных реакций образует круговой конус, который называется конусом трения (рис. 6.2). Если для разных направлений движения коэффициент трения неодинаков (например, при сколь- \Ч.
жении по дереву вдоль и поперек волокон),
ТО конус трения будет некруговым.
 Свойство конуса трения заключается ' в том, что для равновесия тела, лежащего на шероховатой поверхности, равнодействующая приложенных к нему активных сил должна проходить внутри конуса трения.
Свойство конуса трения заключается ' в том, что для равновесия тела, лежащего на шероховатой поверхности, равнодействующая приложенных к нему активных сил должна проходить внутри конуса трения.
2 ПОСТРОЕНИЕ ЭПЮР ПРОДОЛЬНЫХ СИЛ И НОРМАЛЬНЫХ НАПРЯЖЕНИЙ
Эпюры продольных сил – называется диаграмма изменения продольных сил по длине стержня.
Эпюры нормальных напряжений – это диаграмма изменения нормальных напряжений по длине стержня.
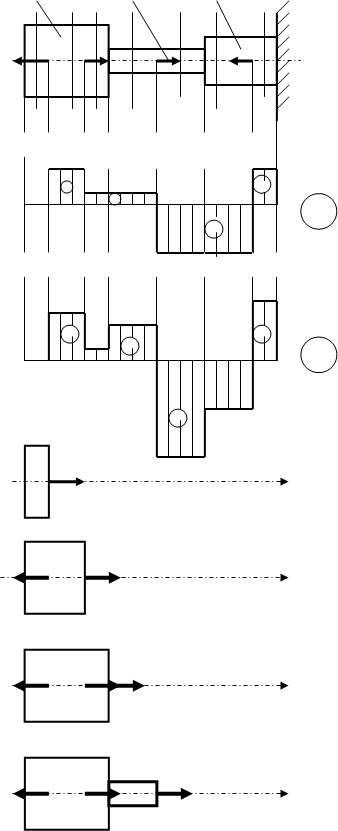 А1=5см2 А2=2см2 А3=4см2
А1=5см2 А2=2см2 А3=4см2
I II III IV V VI VII F1=15кН
F2=10кН
F1 F2 F3 F4 F3=20кН
F4=35кН
I II III IV V VI VII
ЭПЮРА ПРОДОЛЬНЫХ СИЛ
15 15
+ 5 +
N
-15 -
ЭПЮРА НОРМАЛЬНЫХ НАПРЯЖЕНИЙ
30 50
10 25
0 σ
37,5
75


 I N1 Z ∑FnZ=0
I N1 Z ∑FnZ=0
∑FnZ=N1=0
I
II
F1 N2 ∑FnZ=0
Z ∑FnZ=N2-F1=0
N2=F1=15кН
II
III ∑FnZ=0
F1 F2 N3 ∑FnZ=N3-F1+F2=0
Z N3=F1-F2=15-10=5кН
III
IV
F1 F2 N4
Z N4=N3=5кН
V
 F1 F2 F3 ∑FnZ=0
F1 F2 F3 ∑FnZ=0
N5 Z ∑FnZ=N5-F1+F2+F3=0
N5=F1-F2-F3=15-10-20=-15кН
VI
F1 F2 F3 N6
Z N6=N5=-15кН
VI
VII
N7 ∑FnZ=0
F2 F3 F4 FnZ=N7-F1+F2+F3-F4=0
N7
F1 VII Z N7=F4+F1-F3-F2=20кН
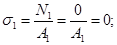

 ;
; 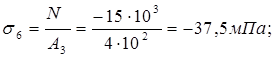
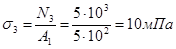 ;
; 


Билет 7
1 Балка-стержень, работающий на изгиб. Стержень- тело, один размер которого значительно больше других.
Нагрузки на балку:
А)Сосредоточенная сила;
Б) момент пары сил;
Равтомерно распределённая нагрузка.
2 В пределах упругих деформаций нормальное напряжение прямо пропорционально величине продольной деформации
 -ЗАКОН ГУКА
-ЗАКОН ГУКА
σ-нормальное напряжение
Е-коэффициент пропорциональности – модуль упругости
ε – продольная деформация.
Е – характеризует способность материала сопротивляться упругим деформациям (жесткость).
 если
если  то
то  .
.
А∙Е – жесткость сечения бруса
 - жесткость бруса при растяжении.
- жесткость бруса при растяжении.
3 Основные понятия и определения
МАШИНА – устройство, совершающее механическое движение, предназначенное для преобразования энергии, материала, информации, и служащее для замены труда человека или повышения его производительности.
Все машины, созданные человеком делятся на три группы:
1 ЭНЕРГЕТИЧЕСКИЕ МАШИНЫ - преобразовывают виды энергии. Делятся на машины - двигатели и машины – генераторы.
ДВИГАТЕЛИ преобразовывают любой вид энергии в механическую энергию.
ГЕНЕРАТОРЫ преобразовывают механическую энергию в другие виды энергии.
2 РАБОЧИЕ МАШИНЫ – делятся на технологические и транспортные.
ТЕХНОЛОГИЧЕСКИЕ – все станки, которые, которые существуют на производстве и в быту.
ТРАНСПОРТНЫЕ – все машины, служащие для перемещения.
3 ЭВМ.
АВТОМАТ – машина, работающая без участия человека.
МЕХАНИЗМ – устройство, служащее для преобразования одного вида механического движения в другой вид механического движения.
Механизм состоит из звеньев.
ЗВЕНО – твердое тело, входящее в состав механизма. Оно может состоять из нескольких деталей, жестко соединенных друг с другом.
Совокупность звеньев, позволяющая перемещение одного звена относительно другого называется кинематической парой.
Кинематические пары делятся на высшие и низшие.

 НИЗШИЕ ( Поступательные пары, вращательные пары, винтовые пары)соединения двух звеньев производится по плоскостям (поршень, цилиндр, подшипники скольжения, сферический шарнир).
НИЗШИЕ ( Поступательные пары, вращательные пары, винтовые пары)соединения двух звеньев производится по плоскостям (поршень, цилиндр, подшипники скольжения, сферический шарнир).

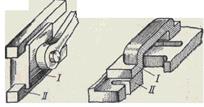
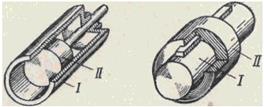

ВЫСШИЕ соединения звеньев по линии или точкам (Профилированные катки, колесо и рельс, фрикционные катки, зубчатые колеса, кулачек кулачкового механизма с острым толкателем, кулачек кулачкового механизма с роликом на конце).



ДЕТАЛЬ – изелие, изготовленное из одного куска материала без применения сборочных операций (Зубчатое колесо, шестерня , шкив, вал, ось).
СБОРОЧНАЯ ЕДИНИЦА – изделие, состоящее из нескольких деталей с применением сборочных операций (Муфта, подшипник, редуктор).
Детали машин и механизмов состоят из трех разделов:
1 соединения и соединительные детали;
2 передачи;
3 механизмы, обеспечивающие передачи (валы, оси, подшипники, муфты).
Билет 8
|
|
2 Условие прочности при растяжении – сжатии


На условие прочности решаются 3 задачи:
1-я –проверка прочности
Выполнить проверку прочности, это значит найти действующее напряжение и сравнить его с допускаемым, или найти коэффициент запаса прочности и сравнить его с допускаемым.


|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|