- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Лемма о параллельном переносе силы
§ 5.1. Лемма о параллельном переносе силы
Лемма. Механическое состояние твердого тела не нарушится, если данную силу перенести параллельно самой себе в произвольную точку тела, добавив при этом пару, момент которой равен моменту данной силы относительно новой точки приложения.
Возьмем тело, находящееся под действием некоторой системы сил, в числе которых есть сила Р, приложенная в точке
|
|

 А (рис. 5.1). Выберем произвольную точку О, которую назовем центром приведения, и на основании аксиомы IV приложим в этой точке две равные силы F' и F", параллельные данной силе F, причем
А (рис. 5.1). Выберем произвольную точку О, которую назовем центром приведения, и на основании аксиомы IV приложим в этой точке две равные силы F' и F", параллельные данной силе F, причем
F'= F"=F.
Систему сил (F, F', F"), эквивалентную силе F, представим как силу F, перенесенную параллельно самой себе в произвольно выбранный центр приведения О, и пару (F, F"), момент которой равен моменту данной силы относительно центра приведения О, являющегося новой точкой приложения силы:
М(F,F")=Fа=М0(F).
Лемма доказана.
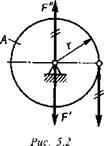
Описанный выше перенос силы можно показать на примере. Рассмотрим колесо А радиуса r , вращающееся на оси в подшипниках (рис. 5.2). Пусть к ободу колеса по касательной приложена сила F (такую силу называют окружной).
Для определения действия силы F на колесо и подшипники применим доказанную лемму и перенесем эту силу параллельно самой себе на ось колеса. В результате получим силу F' =F, вызывающую давление на подшипники, и пару сил (F, F") с моментом, равным Fr, которая будет вращать колесо.
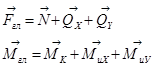
2 МЕТОД СЕЧЕНИЙ
























 В.С.Ф.- внутренние силовые факторы – силы, которые внутри и препятствуют изменению формы и размера.
В.С.Ф.- внутренние силовые факторы – силы, которые внутри и препятствуют изменению формы и размера.
Y N=∑FnZ; MK=∑MZ(FK) Условия
 Mи QY=∑FnY; MиX=∑MX(Fn) равновесия
Mи QY=∑FnY; MиX=∑MX(Fn) равновесия
QY QX=∑FnX; MиY=∑MY(Fn)
N-продольная сила
QX, QY –поперечные

 QX X MK- крутящий момент
QX X MK- крутящий момент
NZ MиХ, МиУ – изгибающие моменты
Z
Mкр 
Вид деформации зависит от наличия внутренних силовых факторов
N-растяжение или сжатие;
Mк- кручение;
MиХ или МиУ – чистый изгиб;
МиХ+QY или МиУ+QX – прямой поперечный изгиб;
QX или QY – сдвиг;
МиХ и МиУ – косой изгиб.
Для выявления внутренних сил в сопротивлении материалов применяется метод сечений. Метод сечений позволяет определить внутренние силовые факторы и виды нагрузок.
3 ВИНТОВЫЕ МЕХАНИЗМЫ
Общие сведения.
Кинематические и силовые соотношения
Передача винт—гайка предназначена для преобразования вращательного движения одного из элементов пары в поступательное перемещение другого. При этом как винт, так и гайка могут иметь либо одно из названных движений, либо оба движения вместе.
К достоинствам винтовых механизмов относятся: простота получения медленного поступательного движения и возможность большого выигрыша в силе, плавность, бесшумность, способность воспринимать большие нагрузки, возможность осуществления перемещений с высокой точностью, простота конструкций.
Недостатками винтовых механизмов являются: большие потери на трение и, как следствие, низкий КПД.
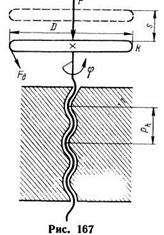
Винты в винтовых механизмах в зависимости от назначения разделяют на грузовые (домкраты, прессы) и ходовые (служащие для точной передачи движения в станках, измерительных устройствах). Определим кинематические соотношения в винтовой паре. На рис. 167 показана схема винтового механизма. Винт вращается вокруг продольной оси и перемещается вдоль нее. Поступательное перемещение винта 5 определяется ходом резьбы рь и углом поворота <р

Скорость поступательного движения

и угловая скорость вращения винта равны производным от соответствующих перемещений по времени.

Отсюда находим
|
|

|
|

|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|