- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Сведения об авторах 5 страница
Рассмотрим пример вычислительного процесса при обработке прерываний от внешних устройств. Пусть программы обслуживания прерываний находятся по адресам 101-200 для диска (нулевой приоритет), 201-300 для принтера (1-й приоритет), 301-400 для мыши (2-й приоритет) и 401-500 для клавиатуры (3-й приоритет). Исполняемый код программы находится в области памяти 701-1500. Для сохранения адресов возврата предусмотрен стек.
Пусть при выполнении команды основной программы по адресу 809 пришло прерывание от клавиатуры. Затем, при выполнении команды по адресу 441 ПОП клавиатуры, пришло прерывание от принтера.
Надо изобразить ход вычислительного процесса в этих условиях.
7.4. Цикл прерывания
Управлением циклов в УУ ЦП занимаются триггеры F и R. Рассмотрим, как происходит управление при поступлении требований прерывания. В такте c2t3 цикла выполнения команды вырабатывается сигнал
Если  c2t3:
c2t3: 
Если  c2t3:
c2t3: 
То есть, если имеется требование прерывания и разрешено прерывание от ОС, то выполняется установка в 1 триггера R, означающая переход к циклу прерывания.
В этом цикле выполняются следующие действия:
C3t0: M[SP] ← PC / запомнить адрес возврата в стеке.
C3t1: INTACK ← 1, VAD ← CD / подтвердить обработку прерывания, занести в VAD вектор прерывания.
C3t2: PC ← VAD / передать в счетчик команд адрес ПОП.
C3t3: IEN ← 0, C ← C0 / Запретить прерывания. Перейти к выборке команды, адрес которой находится в PC.
Запрет прерывания необходим для того, чтобы обеспечить правильное выполнение прерывания, которое начал обслуживать процессор. В начале и в конце каждой ПОП имеются команды, которые нельзя прерывать.
В начале каждого драйвера имеются следующие стандартные команды:
1) Сбросить маски всех устройств, которые имеют приоритет ниже приоритета того устройства, прерывание которого обслуживается;
2) Сбросить регистры прерывания;
3) Запомнить содержание тех регистров процессора основной (прерванной) программы, которые используются в драйвере;
4) IEN ← 1 разрешить прерывания устройствам с более высоким приоритетом;
5) Перейти к выполнению основной части драйвера УВВ.
В конце драйвера:
1) IEN ← 0 запретить прерывания;
2) Восстановить содержание всех регистров процессора основной (прерванной) программы;
3) Сбросить требование прерывания того устройства, которое обслуживалось;
4) Восстановить регистр маски и шифратор приоритетный;
5) Восстановить адрес возврата в прерванную программу из стека PC ← M[SP];
6) Разрешить прерывания IEN ← 1.
Таким образом, мы рассмотрели мероприятия по обслуживанию прерываний.
8. Классификация и тенденции развития архитектур современных компьютеров
8.1. Классификации ЭВМ и ВС
Самой ранней и наиболее известной считается классификация архитектур вычислительных систем, предложенная в 1966 году М. Флинном. Классификация базируется на понятии потока,под которым понимается последовательность элементов, команд или данных, обрабатываемая процессором. На основе числа потоков команд и потоков данных М. Флинн выделяет четыре класса архитектур: SISD, MISD, SIMD и MIMD.

Рис. 8.1. Структура архитектуры класса SISD
SISD(single instruction stream/single data stream) – одиночный поток команд и одиночный поток данных. К этому классу относятся, прежде всего, классические последовательные машины, или иначе, машины фон-неймановского типа, например, PDP-11 или VAX 11/780. В таких машинах есть только один поток команд, все команды обрабатываются последовательно и каждая команда инициирует одну операцию с одним потоком данных. Для увеличения скорости обработки команд и скорости выполнения арифметических операций может применяться конвейерная обработка. Поэтому в этот класс попадают ВМ со скалярными и с конвейерными функциональными устройствами.

Рис. 8.2. Структура архитектуры класса SIMD.
SIMD (single instruction stream/multiple data stream) – одиночный поток команд и множественный поток данных. В архитектурах подобного рода сохраняется один поток команд, включающий, в отличие от предыдущего класса, векторные команды. Это позволяет выполнять одну арифметическую операцию сразу над многими данными – элементами вектора. Способ выполнения векторных операций не оговаривается, поэтому обработка элементов вектора может производиться либо процессорной матрицей, как в ILLIAC IV, либо с помощью конвейера, как, например, в машине CRAY-1.

Рис. 8.3. Структура архитектуры класса MISD.
MISD (multiple instruction stream/single data stream) – множественный поток команд и одиночный поток данных. Определение подразумевает наличие в архитектуре многих процессоров, обрабатывающих один и тот же поток данных. Однако ни М.Флинн, ни другие специалисты в области архитектуры компьютеров до некоторого времени не могли представить убедительный пример реально существующей вычислительной системы, построенной на данном принципе. Ряд исследователей относят конвейерные машины к данному классу. К данному классу, по-видимому, можно отнести появившиеся многоядерные компьютеры.

Рис. 8.4. Структура архитектуры класса MIМD.
MIMD (multiple instruction stream/multiple data stream) – множественный поток команд и множественный поток данных. Этот класс предполагает, что в вычислительной системе есть несколько устройств обработки команд, объединенных в единый комплекс и работающих каждое со своим потоком команд и данных.
Можно отметить два недостатка в классификации М. Флинна. Во-первых, некоторые заслуживающие внимания архитектуры, например, dataflow и векторно-конвейерные машины, четко не вписываются в данную классификацию. Во-вторых, класс MIMD чрезвычайно заполнен. Поэтому необходимо средство, более избирательно систематизирующее архитектуры, которые по М.Флинну попадают в один класс, но совершенно различны по числу процессоров, природе и топологии связи между ними, по способу организации памяти и, конечно же, по технологии программирования.
 |
Роджер Хокниразработал свой подход к классификации для более детальной систематизации компьютеров, попадающих в класс MIMD по систематике М. Флинна. Пытаясь систематизировать архитектуры внутри этого класса, Р. Хокни получил иерархическую структуру, представленную на рис. 8.5. Основная идея классификации состоит в следующем. Множественный поток команд может быть обработан двумя способами: либо одним конвейерным устройством обработки, работающем в режиме разделения времени для отдельных потоков, либо каждый поток обрабатывается своим собственным устройством. Первая возможность используется в MIMD-компьютерах, получивших название конвейерных.
Рис. 8.5. Иерархическая структура архитектуры класса MIMD
Архитектуры, использующие вторую возможность, в свою очередь, делятся на два класса. В первый класс попадают MIMD-компьютеры, в которых возможна прямая связь каждого процессора с каждым, реализуемая с помощью переключателя. Во втором классе находятся MIMD-компьютеры, в которых прямая связь каждого процессора возможна только с ближайшими соседями по сети, а взаимодействие удаленных процессоров поддерживается специальной системой маршрутизации.
Среди MIMD-машин с переключателем Р. Хокни выделяет те, в которых вся память распределена среди процессов как их локальная память, например, PASM, PRINGLE, IBM SP2 без SMP-узлов. В этом случае общение самих процессоров реализуется с помощью сложного переключателя, составляющего значительную часть компьютера. Такие машины носят названиеMIMD-машин с распределенной памятью. Если память – разделяемый ресурс, доступный всем процессорам через переключатель, то MIMD-машины являются системами с общей памятью (BBN Butterfly, Cray C90). В соответствии с типом переключателей можно проводить классификацию и далее: простой переключатель, многокаскадный переключатель, общая шина и т. п. Многие современные вычислительные системы имеют как общую разделяемую память, так и распределенную локальную. Такие системы принято называть гибридными MIMD с переключателем.
Особенности организации и функционирования архитектур с общей, распределенной и смешанной памятью
Классифицируя современные компьютеры, которые практически все относятся к классу MIMD, будем основываться на анализе используемых в системах способах организации оперативной памяти. На рис. 8.6 приведена классификация систем MIMD, основанная на разных способах организации памяти.
Данный поход позволяет различать два важных типа многопроцессорных систем – мультипроцессоры(multiprocessors или системы с общей разделяемой памятью) и мультикомпьютеры(multicomputers или системы с распределенной памятью).
Для мультипроцессоровучитывается способ построения общей памяти. Возможный подход – использование единой (централизованной) общей памяти. Такой подход обеспечивает однородный доступ к памяти (uniform memory access или UMA) и служит основой для построения векторных суперкомпьютеров (parallel vector processor, PVP) и симметричных мультипроцессоров (symmetric multiprocessor или SMP). Среди примеров первой группы суперкомпьютер Cray T90, ко второй группе относятся IBM eServer p690 и др.
Рис. 8.6. Классификация систем MIMD
Общий доступ к данным может быть обеспечен и при физически распределенной памяти (при этом, естественно, длительность доступа уже не будет одинаковой для всех элементов памяти). Такой подход именуется как неоднородный доступ к памяти (non-uniform memory access или NUMA).
Среди систем с таким типом памяти выделяют:
· Системы, в которых для представления данных используется только локальная кэш память имеющихся процессоров (cache-only memory architecture или COMA); примерами таких систем являются, например, KSR-1 и DDM;
· Системы, в которых обеспечивается однозначность (когерентность) локальных кэш памяти разных процессоров (cache-coherent NUMA или CC-NUMA); среди систем данного типа SGI Origin2000, Sun HPC 10000, IBM/Sequent NUMA-Q 2000;
· Системы, в которых обеспечивается общий доступ к локальной памяти разных процессоров без поддержки на аппаратном уровне когерентности кэша (non-cache coherent NUMA или NCC-NUMA); к данному типу относится, например, система Cray T3E.
Мультикомпьютерыуже не обеспечивают общий доступ ко всей имеющейся в системах памяти (no-remote memory access или NORMA). Данный подход используется при построении двух важных типов многопроцессорных вычислительных систем – массивно-параллельных систем (massively parallel processor или MPP) и кластеров (clusters). Среди представителей первого типа систем
– IBM RS/6000 SP2, Intel PARAGON/ASCI Red, транспьютерные системы Parsytec и др.; примерами кластеров являются, например, системы AC3 Velocity, NCSA/NT Supercluster и др.
Следует отметить чрезвычайно быстрое развитие кластерного типа многопроцессорных вычислительных систем.
Далее приводятся базовые характеристики основных классов современных компьютеров.
Массивно-параллельные системы (MPP)
 |
На рис.8.7 представлена типовая архитектура вычислительных систем с распределенной памятью.
Рис. 8.7 Типовая архитектура машины с распределенной памятью
Архитектура:Система состоит из однородных вычислительных узлов, включающих:
· один или несколько центральных процессоров (обычно RISC),
· локальную память (прямой доступ к памяти других узлов невозможен),
· коммуникационный процессор или сетевой адаптер,
· иногда – жесткие диски (как в SP) и/или другие устройства Вв/Выв.
К системе могут быть добавлены специальные узлы ввода-вывода и управляющие узлы. Узлы связаны через некоторую коммуникационную среду (высокоскоростная сеть, коммутатор и т.п.)
Примеры:IBM RS/6000 SP2, Intel PARAGON/ASCI Red, SGI/CRAY T3E, Hitachi SR8000, транспьютерные системы Parsytec и др.
Масштабируемость:Общее число процессоров в реальных системах достигает нескольких тысяч (ASCI Red, Blue Mountain).
Операционная система:Существуют два основных варианта реализации:
1. Полноценная ОС работает только на управляющей машине (front- end), на каждом узле работает сильно урезанный вариант ОС, обеспечивающий только работу расположенной в нем ветви параллельного приложения. Пример: Cray T3E.
2. На каждом узле работает полноценная UNIX-подобная ОС (вариант, близкий к кластерному подходу). Пример: IBM RS/6000 SP + операционная система AIX, которая устанавливается отдельно на каждом узле.
Модель программирования:Программирование в рамках модели передачи сообщений (MPI, PVM, BSPlib)
Распределенность памяти означает, что каждый процессор имеет непосредственный доступ только к своей локальной памяти, а доступ к данным, расположенным в памяти других процессоров, выполняется другими способами.
Чтобы переслать информацию от процессора к процессору, необходим механизм передачи сообщений по сети, связывающей вычислительные узлы. Для абстрагирования от подробностей функционирования коммуникационной аппаратуры и программирования на высоком уровне, используются библиотеки передачи сообщений. Несмотря на существенные различия средств межпроцессорного взаимодействия в разных системах по скоростным параметрам и по способу аппаратной реализации, библиотеки обмена сообщениями выполняют приблизительно одни и те же функции.
Выбор топологии машины часто определяет способ решения прикладной задачи. Надо заметить, что оптимизация алгоритмов для параллельных архитектур существенно отличается от той же работы для последовательных систем. Если переход с одного скалярного процессора на другой практически никогда не требует пересмотра алгоритма, то алгоритм, идеально приспособленный для одной параллельной архитектуры, на другой машине (с тем же числом процессоров того же типа) может работать неприемлемо медленно. Для оценки производительности распределенной системы, кроме топологии связей, необходимо знать скорость выполнения арифметических операций, время инициализации канала связи и время передачи единицы объема информации. Если топология системы не тривиальна, то в состав операционной системы или пакета передачи сообщений приходится включать процедуры маршрутизации сообщений, работающие на каждом узле и обеспечивающие пересылку транзитных сообщений. Они также вызывают задержку при передаче информации между узлами, не имеющими прямого канала связи.
Таким образом, применение дешевых процессоров позволяет сделать относительно недорогой суперкомпьютер. Широкому распространению подобных архитектур препятствует в основном отсутствие эффективных параллельных программ, полностью использующих их возможности.
Симметричные мультипроцессорные системы (SMP)
 |
На рис. 8.8 приведена типовая архитектура мультипроцессорных вычислительных систем с общей памятью.
Рис. 8.8. Типовая архитектура мультипроцессорной системы с общей памятью
Архитектура: Система состоит из нескольких однородных процессоров и массива общей памяти (обычно из нескольких независимых блоков). Все процессоры имеют доступ к любой точке памяти с одинаковой скоростью. Процессоры подключены к памяти либо с помощью общей шины (базовые 2–4 процессорные SMP-сервера), либо с помощью crossbar-коммутатора (HP 9000). Аппаратно поддерживается когерентность кэшей.
Примеры: HP 9000 V-class, N-class; SMP-cервера и рабочие станции на базе процессоров Intel (IBM, HP, Compaq, Dell, ALR, Unisys, DG, Fujitsu и др.).
Масштабируемость: Наличие общей памяти сильно упрощает взаимодействие процессоров между собой, однако накладывает сильные ограничения на их число – не более 32 в реальных системах. Для построения масштабируемых систем на базе SMP используются кластерные или NUMA- архитектуры.
Операционная система:Вся система работает под управлением единой ОС (обычно UNIX-подобной, но для Intel-платформ поддерживается Windows NT). ОС автоматически (в процессе работы) распределяет процессы/нити по процессорам (scheduling), но иногда возможна и явная привязка.
Модель программирования:Программирование в модели общей памяти. (POSIX threads, OpenMP). Для SMP-систем существуют сравнительно эффективные средства автоматического распараллеливания.
SMP - это один компьютер с несколькими равноправными процессорами, но с одной памятью, подсистемой ввода/вывода и одной ОС. Каждый процессор имеет доступ ко всей памяти, может выполнять любую операцию ввода/вывода, прерывать другие процессоры и т.д., но это представление справедливо только на уровне программного обеспечения. На самом же деле в SMP имеется несколько устройств памяти.
Каждый процессор имеет, по крайней мере, одну собственную кэш-память, что необходимо для достижения хорошей производительности, поскольку основная память работает слишком медленно по сравнению со скоростью процессоров (и это соотношение все больше ухудшается), а кэш работает со скоростью процессора, но дорог, и поэтому устройства кэш-памяти обладают относительно небольшой емкостью. Из-за этого в кэш помещается лишь оперативная информация, остальное же хранится в основной памяти. тсюда возникает проблема когерентности кэшей – получение процессором значения, находящегося в кэш-память другого процессора. Это решается при помощи отправки широковещательного запроса всем устройствам кэш-памяти, основной памяти и даже подсистеме ввода/вывода, если она работает с основной памятью напрямую, с целью получения актуальной информации.
Имеется еще одно следствие, связанное с параллелизмом. Неявно производимая аппаратурой SMP пересылка данных между кэшами является наиболее быстрым и самым дешевым средством коммуникации в любой параллельной архитектуре общего назначения. Поэтому при наличии большого числа коротких транзакций (свойственных, например, банковским приложениям), когда приходится часто синхронизовать доступ к общим данным, архитектура SMP является наилучшим выбором; любая другая архитектура работает хуже.
Тем не менее, архитектуры с разделяемой общей памятью не считаются перспективными. Основная причина довольно проста. Рост производительности в параллельных системах обеспечивается наращиванием числа процессоров, что приводит к тому, что узким местом становится доступ к памяти. Увеличение локальной кэш-памяти не способно полностью решить проблему: задача поддержания согласованного состояния нескольких банков кэш-памяти столь же трудна. Как правило, на основе общей памяти не создают систем с числом процессоров более 32, при необходимости объединяя их в кластерные или NUMA- архитектуры.
Системы с неоднородным доступом к памяти (NUMA)
На рис. 8.9 изображена типовая архитектура мультипроцессорных вычислительных систем с неоднородным доступом к памяти.
 |
Рис. 8.9. Типовая архитектура мультипроцессорной системы с неоднородным доступом к памяти
Архитектура:Система состоит из однородных базовых модулей (плат), состоящих из небольшого числа процессоров и блока памяти. Модули объединены с помощью высокоскоростного коммутатора. Поддерживается единое адресное пространство, аппаратно поддерживается доступ к удаленной памяти, т.е. к памяти других модулей. Доступ к локальной памяти узла осуществляется в несколько раз быстрее, чем к удаленной.
В случае, если аппаратно поддерживается когерентность кэшей во всей системе (обычно это так), говорят об архитектуре CC-NUMA (cache-coherent NUMA). Примеры:HP 9000 V-class в SCA-конфигурациях, SGI Origin2000, Sun HPC 10000, IBM/Sequent NUMA-Q 2000, SNI RM600 и др.
Масштабируемость:Масштабируемость NUMA-систем ограничивается объемом адресного пространства, возможностями аппаратуры поддержки когерентности кэшей и возможностями операционной системы по управлению большим числом процессоров. На настоящий момент, максимальное число процессоров в NUMA-системах составляет 256 (Origin2000).
Операционная система:Обычно вся система работает под управлением единой ОС, как в SMP. Но возможны также варианты динамического "подразделения" системы, когда отдельные "разделы" системы работают под управлением разных ОС (например, Windows NT и UNIX в NUMA-Q 2000).
Модель программирования:Аналогично SMP.
По сути своей NUMA представляет собой большую SMP-систему, разбитую на набор более мелких и простых SMP. Аппаратура позволяет работать со всеми отдельными устройствами основной памяти составных частей системы (называемых обычно узлами) как с единой гигантской памятью. Этот подход порождает ряд следствий. Во-первых, в системе имеется одно адресное пространство, распространяемое на все узлы. Реальный (не виртуальный) адрес 0 для каждого процессора в любом узле соответствует адресу 0 в частной памяти узла 0; реальный адрес 1 для всей машины – это адрес 1 в узле 0 и т.д., пока не будет использована вся память узла 0. Затем происходит переход к памяти узла 1, затем узла 2 и т.д. Для реализации этого единого адресного пространства каждый узел NUMA включает специальную аппаратуру (Dir), которая решает проблему когерентности кэшей, обеспечивая получение актуальной информации от других узлов.
Понятно, что этот процесс длится несколько дольше, чем если бы требуемое значение находилось в частной памяти того же узла. Отсюда и происходит словосочетание "неоднородный доступ к памяти". В отличие от SMP, время выборки значения зависит от адреса и от того, от какого процессора исходит запрос (если, конечно, требуемое значение не содержится в кэше).
Поэтому ключевым вопросом является степень "неоднородности" NUMA. Например, если для взятия значения из другого узла требуется только на 10% большее время, то это никого не задевает. В этом случае все будут относиться к системе как к SMP, и разработанные для SMP программы будут выполняться достаточно хорошо.
Однако в текущем поколении NUMA-систем для соединения узлов используется сеть. Это позволяет включать в систему большее число узлов, до 64 узлов с общим числом процессоров 128 в некоторых системах. В результате, современные NUMA-системы не выдерживают правила 10% – лучшие образцы замедление 200–300% и даже более. При такой разнице в скорости доступа к памяти для обеспечения должной эффективности следует позаботиться о правильном расположении требуемых данных. Чтобы этого добиться, можно соответствующим образом модифицировать операционную систему (и это сделали поставщики систем в архитектуре NUMA). Например, такая операционная система при запросе из программы блока памяти выделяет память в узле, в котором выполняется эта программа, так что когда процессор ищет соответствующие данные, то находит их в своем собственном узле. Аналогичным образом должны быть изменены подсистемы (включая СУБД), осуществляющие собственное планирование и распределение памяти (что и сделали Oracle и Informix). Как утверждает компания Silicon Graphics, такие изменения позволяют эффективно выполнять в системах с архитектурой NUMA приложения, разработанные для SMP, без потребности изменения кода.
Параллельные векторные системы (PVP)
Архитектура:Основным признаком PVP-систем является наличие специальных векторно-конвейерных процессоров, в которых предусмотрены команды однотипной обработки векторов независимых данных, эффективно выполняющиеся на конвейерных функциональных устройствах.
Как правило, несколько таких процессоров (1–16) работают одновременно над общей памятью (аналогично SMP) в рамках многопроцессорных конфигураций. Несколько таких узлов могут быть объединены с помощью коммутатора (аналогично MPP).
Примеры:NEC SX-4/SX-5, линия векторно-конвейерных компьютеров CRAY: от CRAY-1, CRAY J90/T90, CRAY SV1, серия Fujitsu VPP и др.
Модель программирования:Эффективное программирование подразумевает векторизацию циклов (для достижения разумной производительности одного процессора) и их распараллеливание (для одновременной загрузки нескольких процессоров одним приложением).
Кластерные системы
Архитектура:Набор рабочих станций (или даже ПК) общего назначения, используется в качестве дешевого варианта массивно-параллельного компьютера. Для связи узлов используется одна из стандартных сетевых технологий (Fast/Gigabit Ethernet, Myrinet и др.) на базе шинной архитектуры или коммутатора.
При объединении в кластер компьютеров разной мощности или разной архитектуры, говорят о гетерогенных (неоднородных) кластерах.
Узлы кластера могут одновременно использоваться в качестве пользовательских рабочих станций. В случае, когда это не нужно, узлы могут быть существенно облегчены и/или установлены в стойку.
Примеры:NT-кластер в NCSA, Beowulf-кластеры, кластеры МГУ и СПбГУ, кластер МЭИ (см.рис. 8.10 и 8.11) и др.
Операционная система:Используются стандартные для рабочих станций ОС, чаще всего, свободно распространяемые – Linux/FreeBSD, вместе со специальными средствами поддержки параллельного программирования и распределения нагрузки.
Модель программирования:Программирование, как правило, в рамках модели передачи сообщений (чаще всего - MPI).
8.2. Организация схем коммутации
Важнейшим аспектом создания высокопроизводительных архитектур является построение средств коммутации.
Структура линий коммутации между процессорами вычислительной системы (топология сети передачи данных) определяется, как правило, с учетом возможностей технической реализации. Немаловажную роль при выборе структуры сети играет и анализ интенсивности информационных потоков при параллельном решении наиболее распространенных вычислительных задач. Рассмотрим основные схемы коммутации в МВС разной системы организации памяти.
Организация схем коммутации в МВС с общей памятью
На рис. 8.10 представлена типовая архитектура МВС с общей памятью.
Замечание.В реальных вычислительных системах (ВС) с общей памятью количество процессоров n не превосходит 32. Число модулей памяти m, осуществляющих хранение данных, не превосходит n, то есть m ≤ n ≤ 32.
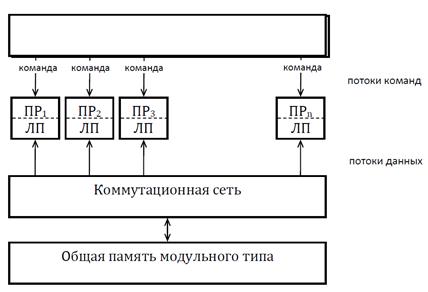
Рис. 8.10. Типовая архитектура МВС с общей памятью
Возможно несколько вариантов построения ВС с общей памятью:
1. ВС с единственным модулем памяти (m ≥ 1), или многовходовой памятью;
2. ВС с несколькими модулями памяти (1 ≤ m ≤ n ), или несколькими многовходовыми памятями;
3. ВС с количеством модулей памяти равным количеству процессоров (m≤ n) и коммутацией в виде коммутационной сети.
На рис. 8.11, 8.12 и 8.13 представлены варианты реализации.

 Рис. 8.11. Единый модуль памяти m = 1
Рис. 8.11. Единый модуль памяти m = 1
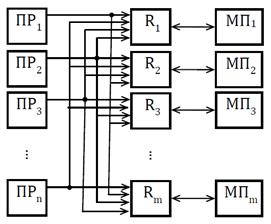

Рис. 8.12. Несколько модулей памяти 1 < m < n
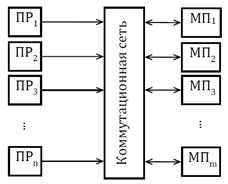
Рис. 8.13. Число модулей памяти равно числу процессоров m ≤ n
Организация средств коммутации в архитектуре “Butterfly”
Для архитектуры “Butterfly” - n = m = 256 . Коммутационный узел (КУ), как изображено на рис. 8.14, имеет 4 входа и 4 выхода, причем каждый вход соединён с каждым выходом.

|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|