- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Электр жетігінің бұрыштық жылдамдығын және моментін автоматты реттеу
5. Электр жетігінің бұрыштық жылдамдығын және моментін автоматты реттеу
Реттеудің диапазонын кеңейту үшін және дәлдікті көтеру үшін тұйықталған реттеу жүйелері қолданылады. Тұйықталған реттеу жүйелерінде сыртқы ауытқулар әсерлерінің орнын жабу, қозғалтқыштың бұрыштық жылдамдығын немесе моментін жоғарғы дәлдікпен қажетті шекте ұстау автоматты түрде орындалады.
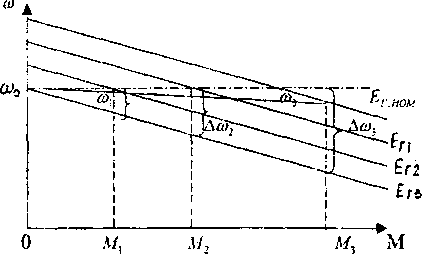
5.1-сурет. Ажыратылған Г-Қ жүйенің механикалық сипаттамалары
5.1- суретте механикалық сипаттаманың қаттылығын жоғары ұстау үшін және реттеу диапазонын кеңейту үшін генератордың ЭҚК-ін жүктеме өскен кезде үлкейту керек.
Автоматталған реттеу жүйесі сыртқы кері байланысты қажет етеді:
кемінде жүйеде шығысын кірісімен қосатын сыртқы байланысы болуы керек. Бұдан басқа автоматталған реттеу жүйенің бөлек элементтердің шығындарын кірістерімен қосатын ішкі кері байланыстары болады.
Сыртқы кері байланыстар қатаң және иілгіш түрлерге бөлінеді. Қатаң сыртқы кері байланыс өтпелі және қалыптасқан режимдерінде, ал иілгіш-тек өтпелі режимде әсер етеді. Оң және теріс сыртқы кері байланыстар болып ажыратылады. Реттелетін шама үлкейсе, оң кері байланыс оны одан бетер үлкейтеді, ал теріс-азайтады. Кері байланыстар кернеудің, токтың, моменттің, жылдамдықтың, бұрылу бұрыштың мәніне немесе туындысына пропорционалды тәуелді сигналдарды жеткізеді. Автоматталған реттеуді орындау үшін кері байланыстың сигналын өлшеу керек, ал содан кейін кернеу түрінде болатын нәтижені кернеу түрінде берілген реттеу шамасының мәнімен салыстырып, (алгебралык қосындыны тауып) нәтижені реттеліп жатқан объектіге жіберу керек. Әдетте, өлшеу кұралдың реттеуіш құралға әсер ететін энергиясы жеткіліксіз болғандықтан күшейткіш құралдың қажеттігі туады. Айтылған элементтер (күшейткіш, өлшегіш және реттеуіш құралдар) реттеу үрдісін орындайды да, реттеуіштің жабдығына кіреді.
Сонымен, автоматталған реттеу жүйесі реттелетін объектіден және реттеліп жатқан шаманын өзгеруіне әсер тигізетін реттеуіштен құралады.
5.7. Кернеу бойынша қатаң теріс кері байланыспен
бұрыштық жылдамдықты автоматты түрде реттеу жүйесі
Жүйенің құрылымдық сұлбасы 5.2-суретте келтірілген.
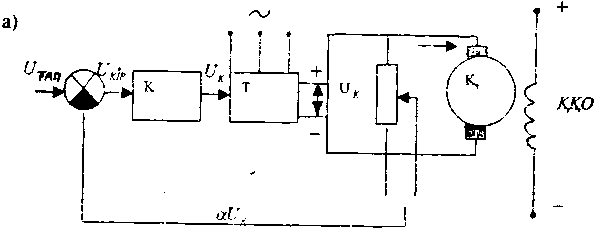
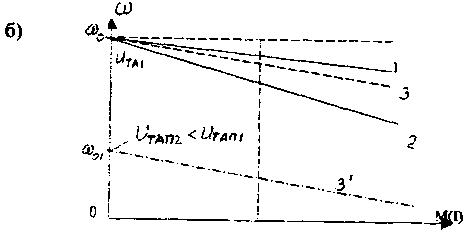
5.2-сурет. Құрылымдық сұлба (а) және қозғалтқыштың сипаттамалары (б)
Қалыптасу режимінде жүйенің барлық элементтерінің теңдеулерінің түрі мынадай болады:
Uкір = Uтап –аUк , Ет=Кк Кт Uк (5.1)
Uқ =Eт – IRт , Uқ =Eқ+ IRқ
Еқ=Cw , М=EI
Мұнда Kк =Uк / Uкір , Kт =Eт / Uк -күшейткіш К және түрлендіргіш Т -ның күшейткіш коэффициенттері; Ет , Ек -түрлендіргіш Т -ның және қозғалтқыш К-ның ЭҚК-тері; Rт , Rк-түрлендіргішпен қозғалтқыштың кедергілері; а = Uк.б. / Uк-кернеу бойынша кері байланыстың күшейту коэффициенті.
Түрлендіруден кейін жабық жүйедегі механикалық сипаттаманың теңдеуін табамыз
 , (5.2)
, (5.2)
 , (5.3)
, (5.3)
мұнда
Кс=Кк Кт
5.8. Зәкір тоғы бойынша қатаң оң кері байланыспен бұрыштық жылдамдықты автоматты реттеу жүйесі.
Жүйенің құрылымдық сұлбасы 5.3-суретте келтірілген
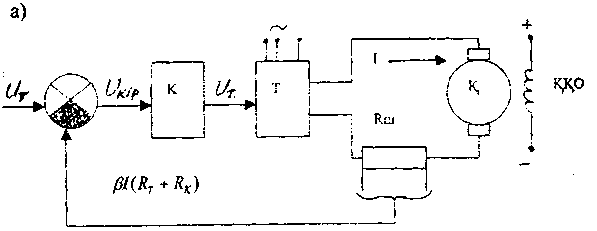
5.3-сурет. Құрылымдық сұлба (а) және қозғалтқыштың сипаттамалары (б)
Күшейткіштің кірісіндегі сигнал кернеулерінің қосындысымен белгіленеді:
Uкір = Uтап +b I (R1+RK), (5.4)
b=  .(5.5)
.(5.5)
(4.1) сияқты теңдеулер жүйесін алып, сәйкес түрлендірулерді өткізіп, тұйықталған жүйенің механикалық сипаттамасының теңдеуін табуға болады:
 , (5.6)
, (5.6)
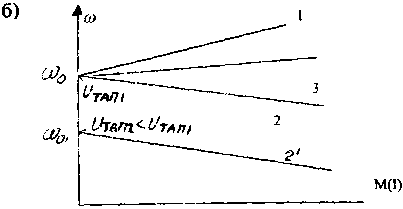
Егер де күшейткішпен түрлендіргіштің күшейту коэффициенттері тұрақты деп есептесек, онда қозғалтқыштың сипаттамалары тура сызық болады. (4.5) теңдеудің бірінші мүшесі Uтап тапсырылған кернеуге пропорционалды өте оңды бос жүріс режиміндегі бұрыштық жылдамдықты белгілейді (2 және 2´ сипаттамалардағы ω0 және ω0' нүктелер).
Статизмді анықтау үшін (4.5) теңдеудің оң жағындағы екінші мүшесін (Мном кезде) бірінші мүшесіне бөлу керек
S=  , (5.7)
, (5.7)
Егер де 
 =1 болса, онда d=0 болады (сипаттама 3) егер де > 1 болса, оңда сипаттама ұлғайған сызық болады (сипаттама 1), егер де
=1 болса, онда d=0 болады (сипаттама 3) егер де > 1 болса, оңда сипаттама ұлғайған сызық болады (сипаттама 1), егер де
< 1болса, онда сипаттама төмен түсетін сызық болады (сипаттама 2).
5.4 Қозғалтқыштың бұрыштық жылдамдығы бойынша қатаң теріс байланыспен бұрыштық жылдамдықты автоматты түрде реттеу жүйесі
Біліктегі жүктеме өскен кезде қозғалтқыштың айналу жиілігі төмендейді, ал сонымен ТГ-дың, қозғалтқышпен бір білікте орналасқан, сигналы төмендейді.
ТГ-дың якорінен алынатын кернеу қозғалтқыштың бұрыштық айналу жиілігіне пропорционалды. Тапсырылған сигнал бұл кезде тұрақты болғандықтан, К күшейткіштің кірісіндегі сигнал үлкейеді, ал сондықтан Т түрлендіргіштің ЭҚК-і үлкейеді жетегінің бұрыштық жылдамдығының құлауын автоматты түрде компенсациялайды.
Жүйенің құрылымдық сұлбасы 5.4-суретте көрсетілген.
Сұлба үшін теңдеулердің жүйесін құрайық:
UКІР = UТАП –jw , ЕТ=КС UКІР
UК =EК + I RК , Uқ =EТ - IRТ
ЕК=Cw , М=сI (5.8)
мұнда J=Uк.б. /w - жылдамдық бойынша кері байланыстың беріліс коэффициенті.
Сәйкестелген түрлендірулерден кейін тұйықталған реттеу жүйесіндегі механикалық сипаттамасына арналған теңдеуді аламыз:
w = 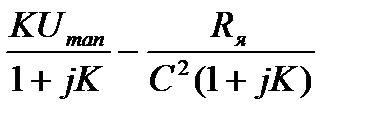 , (5.9)
, (5.9)
мұнда K=Kc /C - барлық жүйенің беріліс (күшейту) коэффициенті;
Rя =Rт+Rқ
Беріліс коэффициент К тұрақты кезде қозғалтқыштың сипаттамалары тура сызықты. Оң жақтың бірінші мүшесі қозғалтқыштың идеал бос жүрісінің бұрыштық жылдамдығын, ал екінші мүше - жүктеме моментінің өзгеруімен пайда болған бұрыштық жылдамдықтың құлауын анықтайды.
5.4 суретте көрсетілген: К  кезеңдегі сипаттама / /ІГ-ның шеткі шамасы бар кезіндегі 2 және 2' сипаттамалар; ажыратылған жүйенің сипаттамасы 3. Күшейту коэффициентінің шамасы үлкен кезде дәлдеп, түзету құрылғыларды немесе тұрақтандыру кері байланыстарды (әдетте теріс иілгіш) кіргізу қажет болады, ал олар жүйені орнықты қылады және өтпелі үрдістердің сапалары керекті болуын қамтамасыз етеді. Жоғарыда қаралған жүйелердің ең үлкен реттеу диапазоны 200:1.
кезеңдегі сипаттама / /ІГ-ның шеткі шамасы бар кезіндегі 2 және 2' сипаттамалар; ажыратылған жүйенің сипаттамасы 3. Күшейту коэффициентінің шамасы үлкен кезде дәлдеп, түзету құрылғыларды немесе тұрақтандыру кері байланыстарды (әдетте теріс иілгіш) кіргізу қажет болады, ал олар жүйені орнықты қылады және өтпелі үрдістердің сапалары керекті болуын қамтамасыз етеді. Жоғарыда қаралған жүйелердің ең үлкен реттеу диапазоны 200:1.
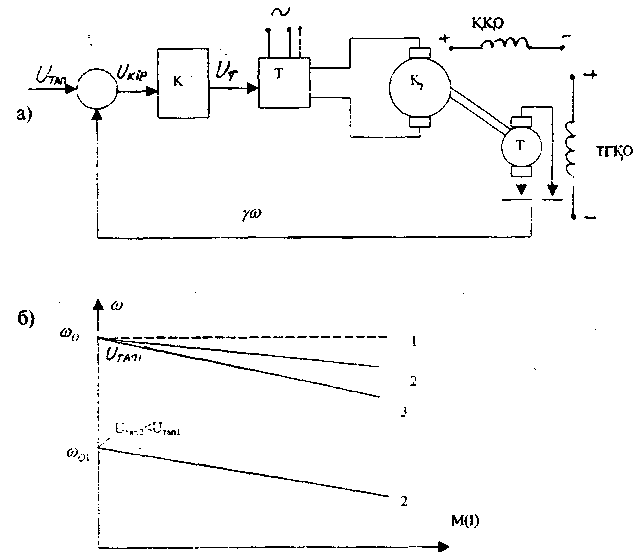
5.4.-сурет. Құрылымдық сұлба (а) және қозғалтқыштың сипаттамалары (б)
Бұл реттеу жүйенің статизмін (M=Mном кезде) мына формула бойынша анықтайды:
d =  , (5.10)
, (5.10)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|