- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Тізбектей қоздырылатын тұрақты ток қозғалтқыштың механикалық сипаттамалары
3.6. Тізбектей қоздырылатын тұрақты ток қозғалтқыштың механикалық сипаттамалары
Электр механикалық сипаттаманың тендеуі
w =  ,
,
мұндағы R - якорь тізбегі мен қоздыру орама кедергілерінің қосынды кедергісі.
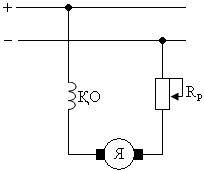
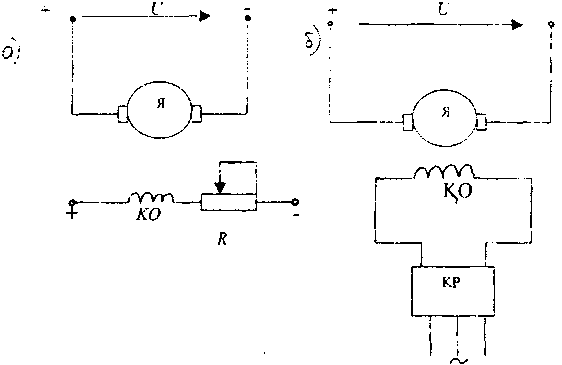
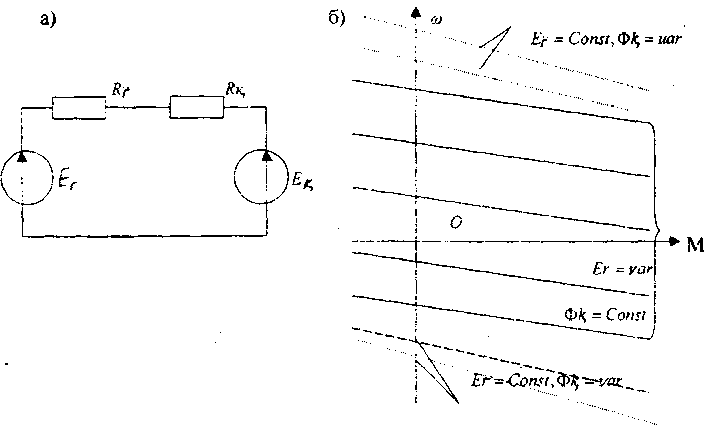
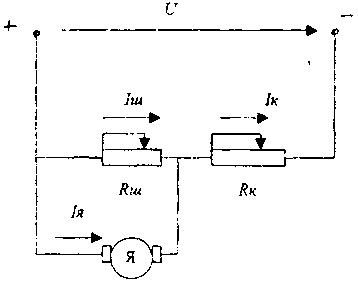
3.16 сурет- Тізбектей қоздырылатын тұрақты ток қозғалтқыштың жалғану сұлбасы
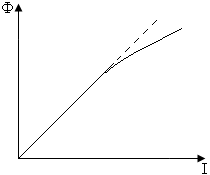
3.17-сурет.Тізбектей қоздырылатын тұрақты ток қозғалтқыштың магниттелу қисығы
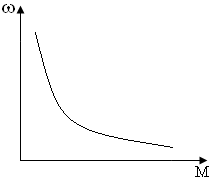
3.18 сурет - Тізбектей қоздырылатын тұрақты ток қозғалтқыштың механикалық сипаттамасы
Тәуелсіз қоздырылатын қозғалтқышқа қарағанда тізбектей қоздырылатын қозғалтқышта магнит ағыны Ф токқа тәуелді.
Егер де магнит жүйенің канығуын есепке алмасақ, онда магнит ағыны мен токтың арасындағы тәуелділік сызықты деп есептеуге болады, яғни Ф = а І.
Бұл жағдайда қозғалтқыштың моменті
М = КФІ = α K I2 = m I2 (3.26)
Бұрыштық жылдамдықгың теңдеуіне теңдеуден токтың мәнін қойсақ механикалық сипаттаманың формуласын табамыз:
w =  (3.27)
(3.27)
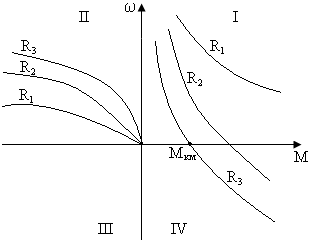
Бұдан шығатыны, егер де магниттік тізбек қаныққан болмаса, онда механикалық сипаттама қисық сызықпен көрсетіледі (3.19-сурет).
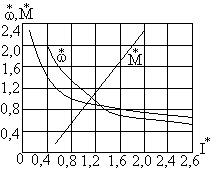
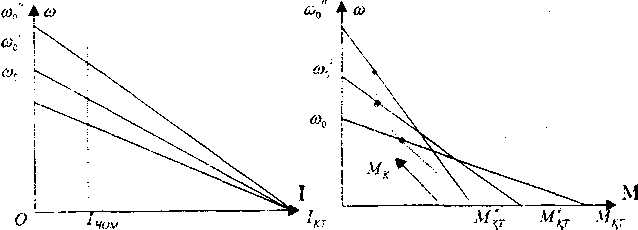
3.19 сурет. Тізбектей қоздырылатын тұрақты ток қозғалтқышының моменті мен бұрыштық жылдамдығының якорь тоғына тәуелділігі
Табиғи механикалық сипаттамалар (2.17) теңдеумен тұрғызылған сипаттамалардан айырмашылығы болғандықтан сипаттамалар графоаналиттік әдіспен тұрғызылады. Табиғи механикалық сипаттамалар, әдетте каталогтарда келтірілетін п – f (І ) және М =Ψ (1) табиғи механикалық сипаттамалар арқылы тұрғызылады.
Жекелеген типті сериялы қозғалтқыштар үшін бұл сипаттамалар салыстырмалы бірлікте беріледі: ω*= ƒ(I*) және M* = Ψ(I*). Осындай әмбебап деп аталатын сипаттамалар 3.19-суретте көрсетілген.
Табиғи сипаттамаларды тұрғызу үшін келесі әдісті пайдаланайық. Табиғи сипаттаманың теңдеуі
ωт = U – I Rk / KФ,
мұндағы Rk= Rя+Rқо немесе
ωт = U / KФ(1 – I Rқ / U) (3.28)
Егерде якорь тізбегіне қосымша кедергі Rр (реостат) қосылса, онда қозғалтқыш реостаттық сипаттамада жұмыс істейді, ол үшін
ω =  (3.29)
(3.29)
осы теңдеуді (2.18) теңдеуге бөлсек:
осы арадан шығатыны
ω =wқ  (3.30)
(3.30)
немесе салыстырмалы бірліктерде
ω*= ω*k  (3.31)
(3.31)
мұндағы R* =  - зәкір тізбегінің салыстырмалы бірліктеріндегі
- зәкір тізбегінің салыстырмалы бірліктеріндегі
жасанды кедергі: Rқ*=  , w*=
, w*=  , wт*=
, wт*=  , I*=
, I*= 
Реостаттық сипаттамаларды тұрғызу тәртібі мынандай:
Токтың I* кейбір мәнін алып, табиғи сипаттама арқылы ωс1*- ты табады. Содан кейін белгілі (2.21) тендеуі бойынша R* = R1* , сондай-ақ I1*, бойынша белгісіз ω1* мәнін анықтаймыз. Дәл осы сияқты токтың I* басқа мәндерінен жылдамдықтың белгісіз ω2*, ω3* және т.б. керекті мәндерін анықтаймыз.
3.20-суретте тізбектей қоздырылатын қозғалтқыштың табиғи Rқ* және Rр* реостаттықсипаттамалары, көрсетілген әдіс бойынша тұрғызылған.
3.19-суреттегі келтірілген ω*= ƒ(I*) қисығын және электрмеханикалық сипаттамаларды пайдаланып қозғалтқыштың механикалық сипаттамаларын
ω*= ƒ(М*) сипаттайтын қисықтарды оңай тұрғызуға болады.
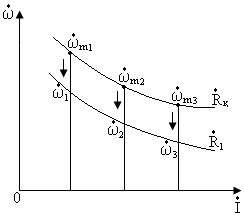
3.20 сурет. Тізбектей қоздырылатын қозғалтқыштың табиғи және реостаттық электрмеханикалық сипаттамалары
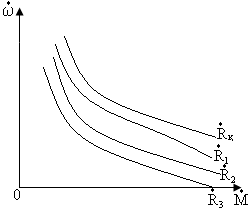
3.21 сурет. Тізбектей қоздырылатын тұрақты ток қозғалтқыштың табиғи және реостаттық механикалық сипаттамалары
3.7. Тізбектей қоздырылатын тұрақты ток қозғалтқышының тежелу режимдеріндегі механикалық сипаттамалары
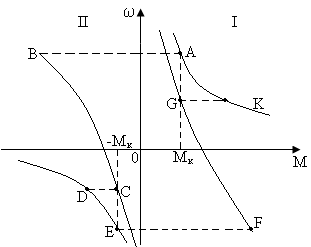
Тізбектей қоздырылатын ЭҚ тежеудің екі режимі болады: динамикалық тежеу және қарсы қосу арқылы тежеу. Динамикалық тежеудің сипаттамасы, қозғалтқыштық режим сипаттамаларының жалғасы ретінде теріс бұрыштық жылдамдық аймағындағы өтетін жалғасы болады. Бұл 3.22-суретте І және ІV квадранттарда өтетін сипаттамалармен көрсетілген.
Егер де жүкті қозғалту моменті электр қозғалтқыштың қысқа тұйықгалу Мқ.т. моментінен үлкен болса ғана қарсы қосу арқылы тежеу мүмкін болады.
Зәкірге келтірілген кернеуді қарама-қарсы өзгерту арқылы қарсы қосу режимін құруға болады. Бұл жағдайда зәкір тоғын өзгеріп, қоздыру токтың бағыты өзгермеуі керек. Кернеу қарама-қарсы өзгерту кезіндегі механикалық сипаттамалар 3.22-суретте келтірілген.
3.22 сурет- Әр түрлі режимдегі тізбектей қоздырылатын қозғалтқыштың механикалық сипаттамалары
3.23 сурет. Қарсы қосу арқылы тежеу режиміндегі тізбектей қоздырылатын қозғалтқыштың механикалық сипаттамалары
Динамикалық тежеу екі әдіспен жүргізіледі: өзін-өзі қоздыру және тәуелсіз қоздыру. Өзін-өзі қоздырып тежеу кезінде (3.24 сурет) қозғалтқыштың зәкірі және қоздыру орамасы желіден ажыратылып кедергіге (резисторға) жалғанады.
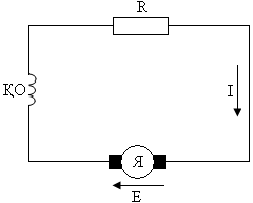
3.24 сурет. Өздігінен қоздырылатын динамикалық тежеу кезіндегі тізбектей қоздырылатын тұрақты ток қозғалтқыштың қосылу сұлбасы
Осындай жағдайлар үшін машинаның механикалық сипаттамалары 3.10.- суреттегі II квадрантта келтірілген. Бұл тежеу әдісі кезінде бастапқыда өте үлкен өзін-өзі қоздыру болады, ол кедергі моментінің ырғақтауына апарады. Сол себептен механизмде қажетсіз соққылар туады. Осы себептен 3.25 суретте көрсетілген сұлба бойынша ЭҚ-тың тәуелсіз қоздырылатын динамикалық тежеу қолданылады.
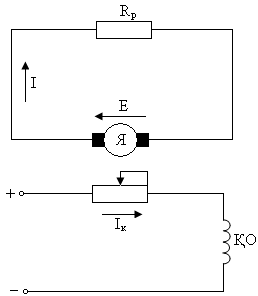
3.25сурет. Тәуелсіз қоздырылатын динамикалық тежеу кезіндегі тізбектей қоздырылатын тұрақты ток қозғалтқыштың қосылу сұлбасы
ЭҚ тәуелсіз қоздырылатын генератор ретінде жұмыс істегендіктен оның сипаттамасы тәуелсіз қоздырылатын ЭҚ динамикалық тежеу сипаттамасы сияқты болады . Бұл сипаттамалар сызықты болады және бәрі де координат басында қиылысады.
3.8. Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштың бұрыштық жылдамдығын магнит ағынын өзгерту арқылы реттеу
w =  (3.32)
(3.32)
теңдеуден үш әр түрлі бұрыштық жылдамдықты реттейтін тәсілі шығады:
а) қоздыру токты (магнит ағынын) өзгерту арқылы;
б) зәкір тізбегінің кедергісін өзгерту арқылы (реостаттық);
в) қозғалтқыштың зәкір кернеуін өзгерту арқылы.
а) кедергі арқылы және б) кернеу реттеуіші арқылы
3.26 сурет-Магнит ағынын өзгерту арқылы бұрыштық жылдамдықты реттеуге арналған ЭЖ-нің сұлбалары.
ЭҚ-тың қоздыру орамасы қозғалтқыштың 2-2,5% қуатын тұтынады, сол себептен қоздыру токты өзгерту арқылы реттеу өте үнемді.
| 3.27-сурет. Қоздыру токты өзгерту арқылы жылдамдықты реттеудің электр механикалық сипаттамалары | 3.28-сурет. Қоздыру токты өзгерту арқылы бұрыштық жылдамдықты реттеудің механикалық сипаттамалары |
Бұл әдісті қолданғанда жылдамдық негізгі жылдамдықтан жоғары реттеледі, ал рұқсат етілетін момент гипербола заңы бойынша өзгереді және рұқсат етілетін қуат тұрақты болып қалады. w = f (І) электрмеханикалық сипаттамаларға қоздыру тоғы өзгерген кезде, идеал бос жүрістің бұрыштық жылдамдығының әртүрлі мәндері сәйкес келеді, ол мына өрнекпен анықталады
wо =  (3.33)
(3.33)
3.27,3.28-суреттерде Ф = Фном кезде тәбиғи сипаттама үшін идеал бос жүрістің бұрыштық жылдамдығы wо ордината өсінде көрсетілген.
Барлық электр механикалық сипаттамалар абцисса өсінің бір нүктесінде қиылысады. Бұл мынадан шығады, w = 0 кезде электр механикалық сипаттамасының тендеу түрінен
0 =  ,
,
ал мұнан токты белгілесек I =  = I қт
= I қт
Механикалық сипаттамалар ординат биікте бір нүктеде қиылысады, себебі магнит ағыны азайғанда қысқа тұйықталу моментінде азаяды
Mқ.т.=KIқ.т.F (3.34)
Реттеу диапазоны 5:1 ден 10:1-ге дейін болады.
Жылдамдық ырғақтылығын берілген диапазон шекте реттеу реостаттың саты санына тәуелді. Бұрыштық жылдамдықтың тұрақтылығы жеткілікті жоғары болады.
3.9. Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштың бұрыштық жылдамдығын реостаттық және импульстік параметрлік тәсілмен реттеу
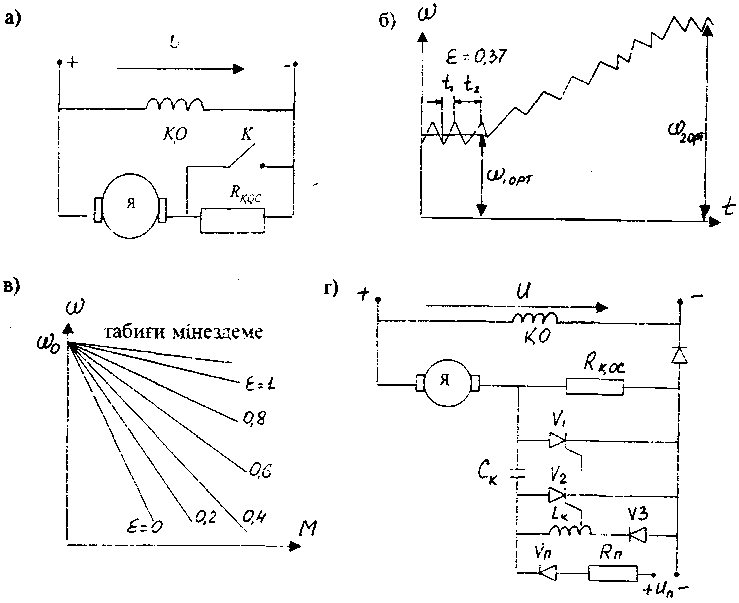
а) қосу сұлбасы; б) жылдамдықты қуыстылық ε өзгерту арқылы реттегендегі график; в) механикалык сипаттамалар; г) тиристорлық кілттің сұлбасы
3.29-сурет. Бұрыштық жылдамдықты импульстік тәсіл арқылы реттеу
Зәкір тізбегіне қосылған қосымша кедергі Rқос сұлбаға толық кіргізіледі немесе кілтпен тұйықталады. Rқос қысқа тұйықталған кезде тізбектегі ток және бұрыштық жылдамдық өседі, ал кілт К ажыратылған кезде ток және жылдамдық азаяды. Кілттің коммутациясы периодтық түрде жүзеге асырылады.
Бұрыштық жылдамдықтың орташа мәні жүктеме момент және кілт К-ның ажыратылған және бекітілген ұзақтылықтың қатынасына тәуелді, яғни басқару импульстердің қуыстылығына
ε =  . (3.35)
. (3.35)
Егер де қозғалтқыштың білігіндегі жүктеме тұрақты кезінде ε өссе, онда бұрыштық жылдамдықта да өседі, ал ε =1 болғанда (кілт К тұрақты жабылып тұр) қозғалтқыш табиғи сипаттамада жұмыс істейді. ε=0 кезде қозғалтқыш Rқос тұрақты қосылған реостат сипаттамада жұмыс істейді (кілт К ажыратылып тұрады) ε басқа мәндері кезінде эквивалентті қосымша кедергі былай белгіленеді
Rқос.экв. = Rқос (1-ε) (3.36)
Ал механикалық сипаттамалар мына теңдеумен белгіленеді
ω =  (3.37)
(3.37)
3.10. Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштың якоріне бурілген кернеуді өзгерту тәсілі арқылы бұрыштық жылдамдықты реттеу
М = КΦI= cопst (3.38)
I = Iном =соnt; Ф = Фном = соnt
Әр түрлі кернеу мәні кезінде қозғалтқыштың бұрыштық жылдамдығы :
 (3.39)
(3.39)
Олардың қатынасы
 (3.40)
(3.40)
Бұдан шығады: кернеу өзгерген кезде реттеулік сипаттамалар бір-біріне параллель жатады, яғни қаттылықтары бірдей, ол бұрыштық жылдамдықтың салыстырмалы жоғары тұрақтылығын анықтайды (3.30- сурет).
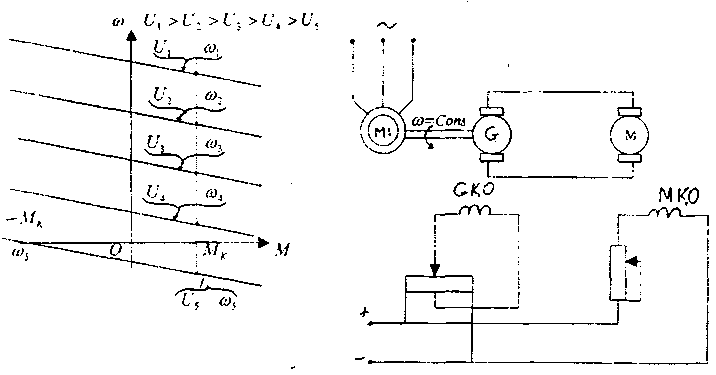
3.30 сурет. Әр түрлі кернеу кезіндегі 3.31 сурет. Г-Қ жүйе бойынша механикалық сипаттамалар қосылған негіздік сұлба
Реттеу диапазоны
 (3.41)
(3.41)
Генератор-қозғалтқыш жүйесінде генератор тұрақты жылдамдықпен айналуға М1 АҚ арқылы келтіріледі. Ал генератордың және реттелетін қозғалтқыштың қоздыру тізбектері тәуелсіз тұрақты ток көзінен қоректенеді. Қозғалтқыштың зәкір тізбегі мен генератордың зәкір тізбегі тікелей қосылады.
Генератордың электр қозғаушы күші
Eг =KгΦг ωг , (3.42)
мұнда
ЭҚК-тердің тепе-теңдік тендеуі:
 (3.43)
(3.43)
Немесе

Бұдан қозғалтқыштың бұрыштық жылдамдығы:
 (3.44)
(3.44)
 болғаңдықтан
болғаңдықтан
 (3.45)
(3.45)
Қозғалтқыштың магнит ағыны тұрақты болғанда:
Мұнда
3.32 сурет - Алмастыру сұлба және механикалық сипаттамалар
Бос жүріс кезіндегі бұрыштық жылдамдық мына формуламен белгіленеді:
Мәндері -тең  - дейін өзгереді. ЭҚК-тің мәндерінің теріс мәнін генератордың қоздыру орамасының кернеуін қарама-қарсы өзгерту арқылы табуға болады.
- дейін өзгереді. ЭҚК-тің мәндерінің теріс мәнін генератордың қоздыру орамасының кернеуін қарама-қарсы өзгерту арқылы табуға болады.
Қозғалтқыштың механикалық сипаттамалары төрт квадрантта жатады, бұл жүйенің негізгі құндылығы - реттеудің ырғақтылығы.
3.11. Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштың зәкірін шунттау тәсілі арқылы бұрыштық жылдамдығын реттеу
 (3.46)
(3.46)
 (3.47)
(3.47)
 (3.48)
(3.48)
Сәйкестендіруші түрлендіруді өткізгеннен кейін табамыз:
 (3.49)
(3.49)
 деп алайық.
деп алайық.
(3.49) теңдеудің сол және оң жағын С=КФ-ке бөлеміз және А мәнін қойғаннан кейін электрмеханикалық сипаттаманың теңдеуін табамыз:
 (3.50)
(3.50)
3.33-сурет. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының зәкір орамасын шунттау сұлбасы
Қозғалтқыштың механикалық сипаттамасының теңдеуі
 (3.51)
(3.51)
Егер де  болса, онда ортақ нүктесі А бар топтас сипаттамалары 3.11 —суретте көрсетілген.
болса, онда ортақ нүктесі А бар топтас сипаттамалары 3.11 —суретте көрсетілген.
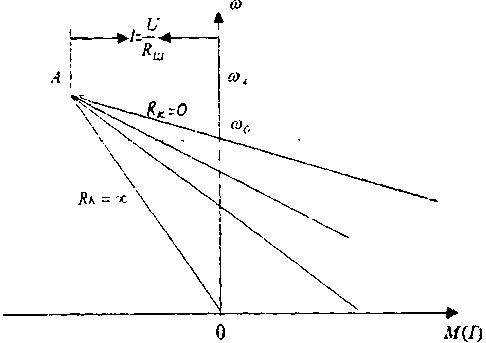
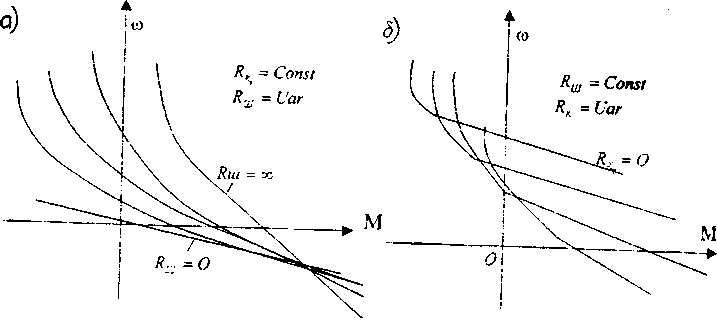
3.34-сурет. Шунттық резистор Rш тұрақты, ал тізбектегі резисторды Rк өзгертіп тұрған кездегі топтас механикалык сипаттамалары
Сипаттамалардың қиылысқан нүктесі А тізбекті резистор арқылы ток өтпейтін жағдайға сәйкес. Бұл зәкірдің бұрыштық жылдамдығы идеал бос жүрістің бұрыштық жылдамдығынан үлкен болған кезде, яғни wа >w 0 , мүмкін болады.
Ал бұл жағдай зәкірдің ЭҚК-і желінің кернеуін және зәкір тізбегінің ішкі кернеу құлауын толық теңгергенде болады, яғни
 (3.52)
(3.52)
Бұл жағдайда қозғалтқыш динамикалық тежелу режимінде сыртқы резистор Rш-қа жұмыс істейді. Якорьдің кернеуі нөлге тең болғандыктан, Iя якорь тоғы
 (3.53)
(3.53)
(3.13) тендеуді (3.12) тендеуге қойып және Е мен U-ды оларға пропорционал wo және wА мәндеріне ауыстырылып А нүктедегі бұрыштық жылдамдықты табамыз.
 (3.54)
(3.54)
Егер де Rк = 0болса, онда зәкір кернеуі Rш тәуелді емес және зәкір тоғы өзгерген кезде тұрақты болып қалады, сол себептен Rк = 0кезі табиғи сипаттамаға сәйкес.
Егер де Rк = ¥ болса, онда қозғалтқыш желіден қоректенбейді де сыртқы резистор Rш-қадинамикалық тежеу режимінде жұмыс істейді, ал сипаттама координата басынан өтеді. Rк - ның басқа мәні кезінде сипаттамалар осы екі сипаттаманың арасында жатады.
Егер де Rк = cоnst, ал Rш = var болса, онда топтас сипаттамалар 3.35-суретте көрсетілген.
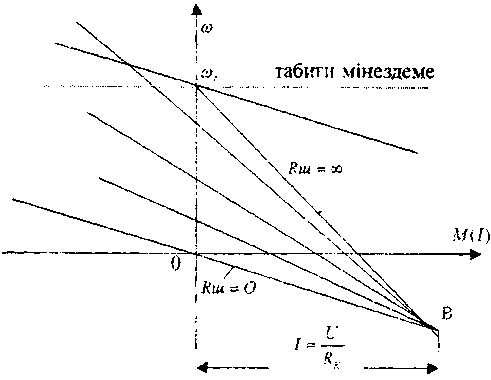
3.35-сурет. Тізбекті резистор Rк тұрақты, ал шунттық резистор Rш өзгеріп тұрған кездегі топтас механикалық сипттамалар
Бұл топтас сипаттамалар шунттық резистордың кедергісі зәкір тоғына әсер етпейтін ортақ нүктесі В бар. Бұл жағдай тек белгілі теріс бұрыштық жылдамдығы кезінде орындауға болады, яғни
 (3.55)
(3.55)
Бұл жағдай кезінде Rш кедергісі қандай да болсын ток өткізбейді, себебі зәкірдің щеткаларының арасындағы потенциалдар айырмасы нөлге тең.
Қозғалтқыш тұтынатын тоғы
 (3.56)
(3.56)
В нүктедегі бұрыштық жылдамдықгы (3.52) теңдеуге Ія токтың мәнін қойып және Е-мен U-дың мәндерін wв және w0 мәндерімен алмастырып табуға болады, яғни
 (3.57)
(3.57)
Rк тұрақты, ал Rш өзгеріп тұрған кезде шеткі жағдайларда 3.12-суретте қалың сызықпен көрсетілген екі сипаттаманы табамыз.
Егер де Rш = 0болса, онда қозғалтқыш динамикалық тежеу режимінде жұмыс істейді, ал сипаттама табиғи сипаттамаға параллел болады.
Егер де Rш = ¥болса, онда шунттық резистор ажыратылғандай болады, ал қозғалтқыш резистор Rқ бар реостаттық сипаттамада жұмыс істейді. Rш -ның аралык мәндері кезінде қалған сипаттамалар көрсетілген екі сипаттаманың арасында жатады.
3.12. Тізбектей қоздырылатын тұрақты ток қозғалтқышының бұрыштық жылдамдығын реттеу
а) Зәкір орамасын шунттау арқылы бұрыштық жылдамдықты реттеу
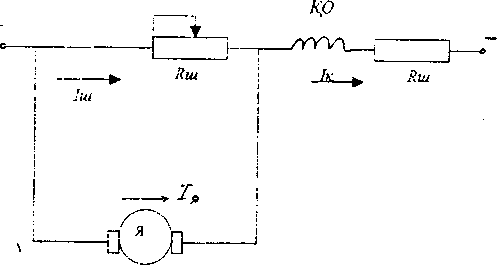
3.37-сурет. Зәкір орамасын шунттау арқылы қозғалтқыштың бұрыштық жылдамдығын реттеу
3.37-суретте келтірілген сұлба бойынша бұрыштық жылдамдықты зәкірдің кернеуін азайту, магнит ағынын өзгерту және реостатты реттеу арқылы жүзеге асырылады.
Егер де резистор Rш кедергісін өзгертіп тұратын болсақ, ондағы ток Ія тұрақты десек, онда әр түрлі Іқ=Ія+Іш қоздыру тоғы туады.
3.38 а,б-суретте қозғалтқыш осы сұлба бойынша қосылған кездегі механикалық сипаттамалар көрсетілген.
Rш = ∞кезде якорь тізбегінің Rқ кедергісі бар резисторды қосқандағы сипаттама болады.
Егер де Rш =0 болса, онда зәкір кернеуі нөльге тең болады, сол себептен сипаттама координата басынан өтетін түзу сызық Rк =∞болса, қозғалтқыш желіден ажыратылған болады да, ол моментті құрмайды.
Егер де Rк = 0болса,онда Rш мен Rятізбектері параллел қосылған кездегі сипаттама болады.
3.38-сурет. Зәкір орамасын шунттаған кездегі тізбектей қоздырылатын тұрақты ток қозғалтқышының сипаттамалары
3.37-суреттегі сұлба бойынша реттеу шектері (2.5-3):1 болады.
Қоздыру ораманы шунттау арқылы бұрыштық жылдамдықты реттеу сұлбасы 3.39 суреттге көрсетілген.
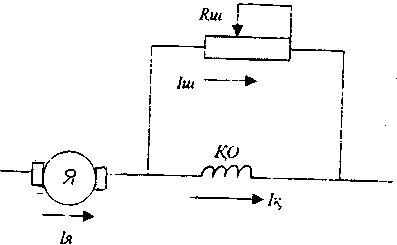
3.39 сурет-Қоздыру ораманы шунттау арқылы бұрыштық жылдамдықты реттеу сұлбасы
Бұл сұлба бойынша бұрыштық жылдамдық қозғалтқыштың магнит ағынын өзгерту арқылы орындалады, себебі якорь тоғы Ія тұрақты кезде резистор Rш арқылы қоздыру токты Іқ = Iя-Iш өзгертуге болады. Магнит ағынының азаю себебінен негізгі жылдамдықтан реттеу жоғары жасалады.
Жүктеме тұрақты кезде қозғалтқыштың бұрыштық жылдамдықты реттеу шектері 2:1.
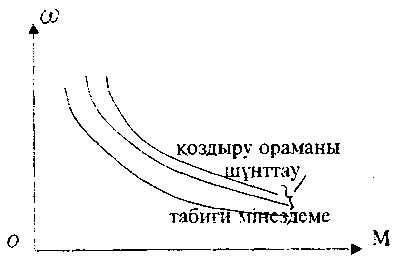
3.40- сурет.Қоздыру ораманы шунттау арқылы бұрыштық жылдамдықты реттеу кезіндегі механикалық сипаттамалар
(4.14)4. Айнымалы ток электр жетектері
4.1. Асинхронды қозғалтқыштар
Асинхронды қозғалтышдеп айнымалы ток электрлік энергияны механикалық энергияға түрлендіретін, роторының айналу жылдамдығы жүктемеге тәуелді болатын машинаны айтады. Асинхронды қозғалтқыштар үшфазалы, екіфазалы, бірфазалы болады және екі негізгі бөліктен тұрады: статор және ротор.
Статор — қозғалтқыштың қозғалмайтын бөлігі (4.1, а - сурет). Оның ішкі жағынан паздар жасалған, оларға фазалық орамалар орнатылады.
Үшфазалы асинхронды қозғалтқышта үш орама болады. Олар бірдей жасалған және 120°-пен орналасқан. Орамалар арқылы жиілігімен айналатын магниттік өрісті тудыратын үшфазалы ток өтеді.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|