- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Асинхронды қозғалтқыштың механикалық сипаттамалары
, (4.1)
мұндағы п — айналу жиілігі, мин -1; f — айнымалы ток жиілігі, Гц; р — полюстер жұбының саны.
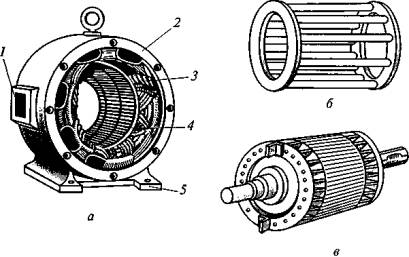
4.1-сурет. Асинхронды қозғалтқыштың құрылысы:
а — статор; б — ротордың қысқаша тұйықталған орамы (тиіннің торы);
в — жиналған түрдегі ротор; 1 — клеммалық қалқан; 2 — станин 3 — орама;
4 — өзекше; 5 — табан
Ротор — қозғалтқыштың айналмалы бөлігі. Ол қысқаша тұйықталған және фазалық бола алады. Қысқаша тұйықталған роторлы қозғалтқыштарда орама шеттерінен тұйықталған мыс немесе құйылған алюминий стержендер түрінде жасалған (4.1,б,в-сурет).
Фазалық роторлы қозғалтқыштарда соңғысының фазалық орамалары болады (4.2,а,б-сурет). Олар статор орамасының түріне байланысты болады және фазаларының саны да сонша болады. Орамалары «жұлдызша» жалғанады, яғни шығыстары бір нүктеге жалғанған, ал бастары білікке бекітілген мыс сақиналарға жалғанады. Мұндай қозғалтқыштарда роторлық орамалы реостатпен іске қосу кезінде тізбектей жалғауға немесе оны жұмыс істеп тұрғанда қысқаша тұйықтауға мүмкіндік беретін құрал болады.
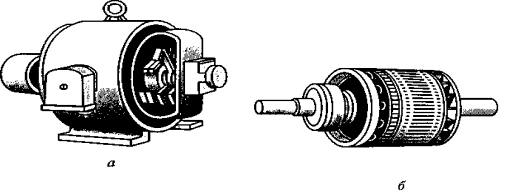
4.2-сурет. Фазалық роторлы асинхронды қозғалтқыш: а — жалпы түрі;
б — қозғалтқыштың контактілі сақиналы роторы
Құйынды токтарға шығындарды азайту үшін асинхронды қозғалтқыштардың статорлары мен роторы жеке бір-бірінен оқшауланған, қалыңдығы 0,5мм электротехникалық болаттан қаңылтырлардан жасалған.
Егер қозғалтқыштың статорлық орамаларын үшфазалы айнымалы ток желісіне қосса, онда статордың ішінде айнымалы магнит өрісі пайда болады. Бұл өріс бір уақытта статор мен ротордың орамаларын қиып өтеді. Статорлық орамаларда орамның ток күшін анықтайтын теріс ЭҚК-тері индукцияланады.
Роторлық орамаларда ЭҚК индукцияланады, оның әсерінен орамаларда токтар өтеді. Ол токтар статордың құйынды айнымалы магнит өрісімен әсерлесіп айналу моментін тудырады, осының нәтижесінде ротор статордың өрісінің айналу жағына қарай айнала бастайды.
Демек, ротор айналғанда оның айналу жиілігі статор өрісінің айналу жиілігінен аз болу керек. Осыдан қозғалтқыш асинхронды деген (біруақыттылы емес) деген атқа ие болды. Статордың өрісінің айналу жиілігі п мен ротордың айналу жиілігінің п1 айырмашылығы s сырғанау деп аталатын шамамен сипатталады:
 (4.2)
(4.2)
Асинхронды қозғалтқыш үшін сырғанау бірден нөлге жақын шамаға дейін өзгереді.
Қозғалтқышты іске қосқанда, ротор қозғалмай тұрғанда (s=1), ротор орамасының айналатын магнит өрісімен қиылысу жиілігі ең үлкен болады. Ротордың орамаларында үлкен ток күшін әкелетін ең үлкен ЭҚК-тері индукцияланады. Ротор орамаларының токтары өзінің айнымалы магнит өрісін тудырады, ол өріс статорды айналдыратын магнит өрісіне қарсы бағытталады және оны азайтады. Нәтижесінде теріс ЭҚК-і азаяды, ал статор орамаларындағы ток артады. Іске қосу тогы номинал токтан 4-7 есе артық болады.
Қысқаша тұйықталған роторлы қозғалтқыштардың роторының айналу жиілігі полюстар жұбын ауыстырып қосу арқылы немесе кернеудің шамасын өзгерту арқылы реттеледі.
Фазалық роторлы қозғалтқыштың айналу жиілігі ротордың орамасына қосылған реостатпен реттеледі. Реостаттың кедергісін өзгерту арқылы ротордағы ток күшін өзгертеді, бұл кезде ротордың өрісі өзгереді, сонымен қатар ротордың және статордың өрістерінің әсерлесу күші өзгереді. Демек, сырғанаудың шамасы өзгереді.
4.2. Синхронды машиналар
Синхронды машиналар көбінесе генератор ретінде пайдаланылады. Синхронды электр қозғалтқыштары асинхронды қозғалтқыштарға қарағанда сирек қолданылады, оларды тек берілген қуат пен жұмыс режимінде тиімді болғанда ғана қолданылады.
Машинаның роторының жылдамдығы статордың орамасындағы ток тудыратын айнымалы магнит ағынының жылдамдығымен бірдей болады, яғни ротордың айналуы және магнит ағынының өзгеруі синхронды болады, сол себепті бұл машинаны синхронды теп атайды.
Синхронды машинаның құрылысы.
Синхронды машина асинхронды машина сияқты қозғалмайтын статордан және қозғалатын ротордан тұрады. Статордың үшфазалы асихронды қозғалтқыштың статорынан айырмашылығы жоқ. Ротор айналатын электромагнит түрінде болады, оның орауыштары тұрақты токпен қоректендіріледі.
Құрылыс жағдайында жетегі іштен жану қозғалтқышынан болатын синхронды генераторлар жылжымалы электрлік станциялар үшін қолданылады.
Синхронды қозғалтқыштардың механикалық сипаттамасы абсолютті қатаң болады, яғни айналу жылдамдығы тұрақты болады. Өндірісте және құрылыста бұл қозғалтқыштар компрессорлық және сораптық қондырғылардың жетектері үшін, сонымен қатар тас ұнтақтау және экскаваторлардың жетегі үшін қолданылады.
4.3.Асинхронды электр жетегінің қарапайым моделдері
Асинхронды машинаның жалпы түрдегі жұмыс істеу принципі мынадай: машинаның элементтерінің бірі – статор белгілі бір жылдамдықпен қозғалатын магнит өрісін тудыру үшін қолданылады, ал басқа элементтің тұйықталған өткізгіш контурларында – роторда магнит өрісімен әсерлескенде күштердің (моменттердің) пайда болуын және токтардың жүруін тудыратын ЭҚК пайда болады. Бұл құбылыстар өріске қатысты ротордың синхронды емес – асинхронды қозғалысы кезінде болады, сол себепті машиналардың бұл түрін – асинхронды деп атайды.
Статор әдетте бірнеше паздарда орналасқан катушкалар түрінде орындалады, ал ротор - “ақ тиін торы” (қысқаша тұйықталған ротор) түрінде немесе бірнеше катушкалар (фазалық ротор) түрінде (катушкалар бір-бірімен жалғанған және білікте орналасқан сақиналарға шығарылып, олар арқылы сырғитын щеткалардың көмегімен сыртқы резисторларға тұйықталған) орындалады.
Құрылымдық және физикалық құбылыстардың қарапайымдылығына қарамастан асинхронды машинадағы процестердің толық математикалық сипаттамасы күрделі болады:
біріншіден, барлық кернеулер, токтар, ағын ілінісі – айнымалы шамалар, олар жиілікпен, амплитудамен, фазамен немесе сәйкес векторлық шамалармен сипатталады;
екіншіден, қозғалатын контурлар әсерлеседі, олардың кеңістікте өзара орналасуы өзгереді;
үшіншіден, магнит ағыны магниттеу тогымен бейсызықты байланысқан (магниттік тізбек қанығады), ротор тізбегінің активті кедергілері жиілікке тәуелді (токты ығыстыру эффектісі), барлық тізбектердің кедергілері температураға тәуелді және т.с.с.
Асинхронды электр жетегіндегі негізгі құбылыстарды түсіндіру үшін асинхронды машинаның қарапайым моделі қарастырылады.
4.3.1. Қозғалтатын магнит өрісін алу принципі
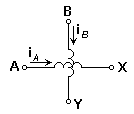
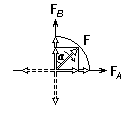
Статорда айнымалы ток iA = Imsinwt (w = 2pf1) өтетін орам (орауыш) А-Х (4.3,а,б-сурет)орналассын. Осы токтан пайда болған магнит қозғауыш күш (МҚК) FА орамының өсімен пульсацияланады (4.3,в-суреттегі көлденең штрих стрелкалары).
FА = Fmsinwt
 а)
а)
 б)
б)
 в)
в)
|
 г)
г)
|
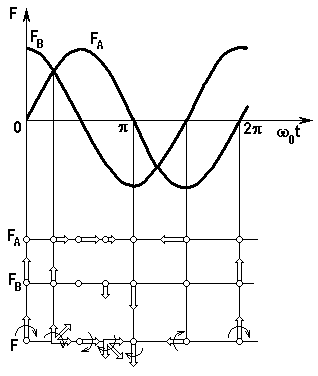
4.3-сурет. Машинадағы айналдыратын магнит өрісінің пайда болуы
Егер 900 бұрышпен орналасқан орамды (орауышты) BY қосса және ол арқылы iB = Imcoswt тогын жіберсе, онда МҚК FВ осы орамның өсі бойынша пульсацияланады (тік стрелкалар):
FВ = Fmcoswt. (4.3)
Нәтижелік ЭҚК-інің векторының модулі
 (4.4)
(4.4)
Оның a фазасы келесі шарттан анықталады
 (4.5)
(4.5)
Сонымен, қабылданған шарттарда, яғни кеңістікте екі орамның  бұрышына және уақыт бойынша -ге токтың ығысуы кезінде, нәтижелік МҚК-інің векторы
бұрышына және уақыт бойынша -ге токтың ығысуы кезінде, нәтижелік МҚК-інің векторы  бұрыштық жылдамдығымен айналады, мұндағы f1 – орамдардағы ток жиілігі.
бұрыштық жылдамдығымен айналады, мұндағы f1 – орамдардағы ток жиілігі.
Жалпы алғанда, р полюстар жұбы (р=1,2,3...) бар машина үшін  , (рад/с) синхронды бұрыштық жылдамдығы, яғни өрістің жылдамдығы, келесідей анықталады:
, (рад/с) синхронды бұрыштық жылдамдығы, яғни өрістің жылдамдығы, келесідей анықталады:
 ; (4.6)
; (4.6)
n0 айналу жиілігі, айн/мин:
 , (4.7)
, (4.7)
Яғни f1=50Гц желіден қоректенгенде синхронды айналу жиілігі машинаның құрылымына байланысты 3000, 1500, 1000, 750, 600... айн/мин бола алады.
(4.1) және (4.2) өрнектердің принциптік сипаттамасы бар: олар берілген машина үшін өрістің жылдамдығын өзгертудің бір ғана мүмкіндігі барын көрсетеді және ол – f1 қоректену көзінің жиілігін өзгерту.
4.3.2.w = w0 кезіндегі процестер
Ротор w0 жылдамдығымен айналсын, яғни оның орамалары магниттік өрістің күштіік сызықтарын қимайды және процестерге елеулі әсер етпейді.
Жуықталған, бірақ кейде пайдалы жақындауда статордың фазасының орамасын белгілі бір идеалды орауыш түрінде қарастыруға болады, ол орауышқа айнымалы кернеу  берілген. Әрі қарай біз не бас әріптеріне сәйкес басқа да синусойдалы өзгеретін айнымалыларын белгілейміз, егер олардың әсер етуші мәндері керек болса, не жоғарыда нүктені қосумен, онымен біз
берілген. Әрі қарай біз не бас әріптеріне сәйкес басқа да синусойдалы өзгеретін айнымалыларын белгілейміз, егер олардың әсер етуші мәндері керек болса, не жоғарыда нүктені қосумен, онымен біз  амплитудасы және j фазасы бар уақыт бойынша өзгеретін вектор туралы айтылатынын көрсетеміз.
амплитудасы және j фазасы бар уақыт бойынша өзгеретін вектор туралы айтылатынын көрсетеміз.
Берілген  кернеуі
кернеуі  өздік индукцияның ЭҚК-імен теңесетіні анық (4.4,а,б-сурет).
өздік индукцияның ЭҚК-імен теңесетіні анық (4.4,а,б-сурет).
 , (4.8)
, (4.8)
Мұндағы: w – ораманың орам саны; kоб – ораманың нақты орындалуына байланысты коэффициент.
Магнит ағыны берілген кернеумен, жиілікпен және ораманың шама-шарттарымен анықталады деп санауға болады:
 . (4.9)
. (4.9)
Статордың орамасындағы (фазадағы) ток – магниттелу тогы кезінде тек магнит ағынымен және машинаның магниттелу сипаттамасымен анықталады (4.4,в-сурет):
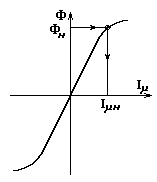
а) б) в)
4.4-сурет. w = w0 кезіндегі асинхронды машинаның идеалдандырылған моделі (а), векторлық диаграмма (б) және магниттелу қисығы (в)
Сериялық машиналарда U1=U1н және f1=f1н кезінде, яғни номиналды магнит ағыны кезінде бос жүріс тогы I10 әдетте статордың I1н номиналды тогының 30%-40%-ын құрайды.
4.3.3. Жүктелген кездегі процестер
Білікті жүктеген кезде  ; w және w0 жылдамдықтарының айырмашылығын сырғанаумен сипаттайды.
; w және w0 жылдамдықтарының айырмашылығын сырғанаумен сипаттайды.
 (4.10)
(4.10)
Енді ротордың тізбегінде электромагниттік индукция заңына сәйкес ЭҚК  пайда болады:
пайда болады:
=E1¢s (4.11)
Мұнда және әрі қарай штрихпен келтірілген шамалар белгіленеді, олар статордың және ротордың орамаларының бірдей еместігін ескереді. Шыққан ЭҚК-інің жиілігі:
f2=f1s (4.12)
Кедергісі R2¢ және индуктивтілігі L2¢ ротордың тізбегінде ток I2¢ келесідей анықталады:
немесе қарапайым түрлендірулерден кейін
 (4.13)
(4.13)
мұндағы Х2¢ – f1 жиілігі кезіндегі екінші ретті ораманың шашырауының индуктивті кедергісі.
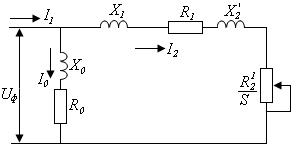
Асинхронды қозғалтқыштың фаза алмастыру дәстүрлі сызбасына сәйкес теңдеуді алдық (4.5-сурет), онда статордың да шама-шарттары R1 және Х1 ескерілген. Бұл қарапайым модель арқылы орныққан режимдерді симметриялы қоректенілетін симметриялы қозғалтқыш кезінде талдауға болады.
4.5-сурет. Асинхронды қозғалтқыштың алмастыру сұлбасы
4.3.4. Энергетикалық режимдер
Механикалық сипаттаманы алу үшін, электр машиналар курсында жиі пайданылатын, магниттеу контурын қыспақтарға шығаратын моделді қарастырады. (4.6,а-сурет).
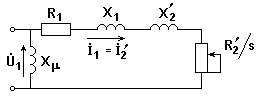
а)
б)
4.6-сурет. Асинхронды машинаның қарапайым алмастыру сұлбасы (а) және сипаттамалары (б)
 болғандықтан,
болғандықтан,
Мұндағы: I2а – ротордың тогының активті құраушысы, y2 –  және
және  арасындағы бұрыш.
арасындағы бұрыш.
М(s) механикалық сипаттама туралы түсінікті үш көбейткіштің әрқайсысының s-ке тәуелділігін бақылау арқылы алуға болады.
Магнит ағыны Ф бірінші жақындауда (4.4)-ке сәйкес s-ке тәуелді емес (4.6,б-сурет). s=0 кезінде ротордың тогы (4.8) нөлге тең және s ® ±¥ кезінде асимптотикалық түрде  қатынасына ұмтылады (4.6,б-сурет). Алмастыру сұлбасы арқылы соңғы көбейткішті анықтауға болады:
қатынасына ұмтылады (4.6,б-сурет). Алмастыру сұлбасы арқылы соңғы көбейткішті анықтауға болады:
 ;
;
s аз шама болғанда cosy2 мәні ±1-ге жақын және s ® ±¥ болғанда асимптотикалық түрде нөлге ұмтылады. Үш көбейткіштің көбейтіндісі ретінде момент s = 0 кезінде нөлге тең (w=w0 – идеалды бос жүріс), оң Мк+ және теріс Мк- максимумдарына – критикалық мәндеріне  сырғанаудың критикалық мәдері кезінде жетеді, одан кейін үшінші көбейткіш арқылы нөлге ұмтылады.
сырғанаудың критикалық мәдері кезінде жетеді, одан кейін үшінші көбейткіш арқылы нөлге ұмтылады.
Механикалық сипаттаманың теңдеуін механикалық және электрлік шамалар арқылы берілетін ротордың тізбегіндегі шығасыларды теңестіру арқылы алуға болады. Желіден тұтынатын қуат, R1-дегі шығасыларды ескермегенде, электрмагниттік қуатпен шамалас болады:
 ,
,
Біліктегі қуат келесідей анықталады
 .
.
Ротордың тізбегіндегі шығасы
 (4.15)
(4.15)
немесе электрлік шамалармен берілгенде:
 ,
,
Осыдан:
 .
.
Соңғы өрнекке (4.8)-ден I2¢ қойып, және М=f(s) функциясының экстремумын және оған сәйкес Мк және sк тауып, келесі теңдеуді аламыз:
 (4.16)
(4.16)
мұндағы а=R1/R¢2:
 (4.17)
(4.17)
 (4.18)
(4.18)
Практикада кейде а = 0 деп алады, яғни статордың орамаларының активті кедергісін ескермейді. Бұл әдетте Рн > 5кВт болғанда елеулі қателіктерге әкелмейді, бірақ бұл аз қуаттарда моделді нашарлата алады.
а = 0 кезінде (4.16) - (4.17) өрнектері келесідей түрге ие болады:
 (4.19)
(4.19)
 (4.20)
(4.20)
 (4.21)
(4.21)
мұндағы Хк = Х1+Х2’ – машинаның шашырау индуктивті кедергісі.
(4.16) теңдеуінде, s<<sк кезінде, бөлімінде бірінші мүшені ескермеуге болады және жұмыс учаскесінде механикалық сипаттаманы келесі түрде алуға болады:
 . (4.22)
. (4.22)
4.6,б-суреті және (4.16) және (4.17) өрнектері бойынша асинхронды қозғалтқыштың механикалық сипаттамасының қатаңдығы айнымалы болса, жұмыс учаскесінде  , ал ½s½>½sкр½ кезінде – оң болады.
, ал ½s½>½sкр½ кезінде – оң болады.
Асинхронды электр жетегі тұрақты ток электр жетегі сияқты, тұрақты ток электр жетегіндегі энергия ағынының таралуымен, қозғалтқыштық және үш тежелу режимінде жұмыс істей алады (4.7-сурет).

4.7-сурет. Асинхронды электржетегінің энергетикалық режимдері
Рекуперативті тежелу (р.т.) қозғалтқыш активті моментпен w>w0 жылдамдығымен айналған кезде болады. w жылдамдығымен ротор айналғанда өрістің w0 айналу жылдамдығын азайтса, онда рекуперативті режим болады. Бұл жерде активті моменттің ролін айналатын ротордың инерциялық массаларының моменті атқарады.
Кері қосылумен тежелуді (к-қ.т.) алу үшін екі фазасын орындарымен айырбастау қажет (4.8-сурет). Бұл кезде өрістің айналу бағыты өзгереді, машина кері қосу режимінде тежеледі, одан кейін реверстеледі (кері айналады).
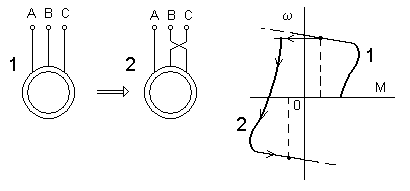
4.8-сурет. Асинхронды қозғалтқыштың реверсі
Динамикалық тежеу режимі ерекше болып табылады. Бұл режим желіден ажыратылған айнымалы ток асинхронды қозғалтқыштың генераторлық режимі болып табылады, қозғалтқыштың статорына Iт тұрақты ток берілген. Бұл режим бірқатар жағдайларда қолданылады, ол кезде қозғалтқыш желіден ажыратылғаннан кейін реверссіз жылдам тоқтатылуы қажет.
Статордың орамасына берілетін тұрақты ток кеңістікте қозғалмайтын өрісті тудырады. Ротор айналғанда оның орамасында айнымалы ЭҚК пайда болады, оның әсерінен айнымалы ток өтеді.
Статордың және ротордың өрістері қосылып, нәтижелік өрісті береді, нәтижесінде бұл өріспен ротор тогының әсерлесуінен тежелу моменті пайда болады. Қозғалтқыштың білігінен келетін энергия бұл кезде ротор тізбегінің кедергілерінде таралады.
Динамикалық тежелу режимінде статордың өрісі қозғалмайды, сырғанау келесі түрде жазылады:
және келесі өрнектер (4.16) - (4.18) механикалық сипаттамалар үшін орындалады:
 (4.23)
(4.23)
 (4.24)
(4.24)
мұндағы  статор орамалары жұлдызша жалғанғанда
статор орамалары жұлдызша жалғанғанда
және  статор орамалары үшбұрышпен жалғанғанда;
статор орамалары үшбұрышпен жалғанғанда;
 (4.25)
(4.25)
Қанықпаған машина кезінде  болғандықтан, динамикалық тежелу режиміндегі sк.т критикалық сырғанау sк сырғанауынан елеулі аз болады.
болғандықтан, динамикалық тежелу режиміндегі sк.т критикалық сырғанау sк сырғанауынан елеулі аз болады.
4.4. Асинхронды қозғалтқыштың механикалық сипаттамалары
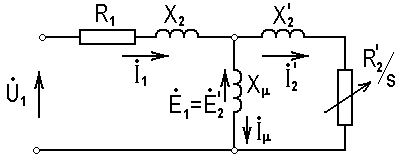
Асинхронды қозғалтқыштың механикалық сипаттамаларын тұрғызу үшін алмастыру сұлбасын пайдаланады. Сұлба 4.9-суретте келтірілген.
4.9 сурет – Асинхронды қозғалтқыштың алмастыру сұлбасы
Мұнда: S=  асинхронды қозғалтқыштын (АҚ) сырғанауы;
асинхронды қозғалтқыштын (АҚ) сырғанауы;
w0=  ; w0=
; w0=  синхронды бұрыштың айналу жиілігі;
синхронды бұрыштың айналу жиілігі;
¦1 - желінің жиілігі (50Гц),
р- полюстердің жұп саны.
Келтірілген алмастыру сұлба бойынша екінші ретті ток үшін мынадай болады:
I2/ = 
 (4.26)
(4.26)
айналдыру моменті
M =  (4.27)
(4.27)
теңдеу (2.23) теңдеуге қойып, табамыз:
М =  (4.28)
(4.28)
 = 0-ге тең деп алып, қозғалтқыштың моменті максимал (критикалық) болғандағы sк критикалық сырғанау мәнін анықтаймыз
= 0-ге тең деп алып, қозғалтқыштың моменті максимал (критикалық) болғандағы sк критикалық сырғанау мәнін анықтаймыз
sк = ±  (4.29)
(4.29)
sк мәнін (2.24) теңдеуіне қойып, Мк моменттің максимал мәні үшін өрнекті табамыз
Ммакс =  (4.30)
(4.30)
«+» - таңбасы қозғалтқыштық режимге, ал «-» таңбасы желімен параллель істейтін генераторлық режим жұмысына жатады.
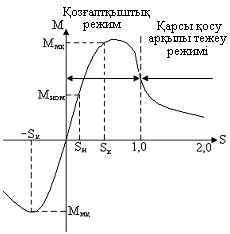
4.10- сурет. Асинхронды қозғалтқыштың механикалық сипаттамалары
4.10-суретте асинхрондық қозғалтқыштың механикалық сипаттамасының ерекше нүктелері көрсетілген.
1) s = 0; М = 0 - АҚ синхронды жылдамдықта;
2) s = sном; М = Мном - номинал моментпен номинал жылдамдыққа сәйкес;
3) s = sк; M = Mмқ - қозғалтқыштық режимдегі максимал момент;
4) s = 1,0; M = Mп = 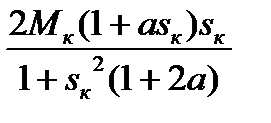 - бастапқы жүргізу момент;
- бастапқы жүргізу момент;
5) s = -sк; М = Мк.г. - желімен параллель істейтін генераторлық режим жұмысына жататын максимальды момент.
Максималды момент ротордың активтік кедергісінен R2 тәуелсіз, ал ротордың кедергісі ұлғайған сайын, критикалық сырғанауда өседі. Осы себептен фазалы роторлы АҚ-тың ротор тізбегіне кедергі қосқан кезде Ммакс қисығы да сырғанау өскен жаққа ығысады.
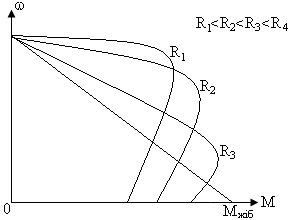
4.11- сурет. Фазалы роторлы асинхрондық қозғалтқыштың табиғи және реостаттық механикалық сипаттамалары
4.5. Тежеу режимдеріндегі АҚ-тың механикалық сипаттамалары
Асихрондық қозғалтқышын тежеудің үш негізгі әдістері бар:
а) генераторлық тежеу режимі;
б) динамикалық тежеу режимі.
в) қарсы қосу арқылы тежеу режимі
Егер де ротор айналып тұрған кезде статордың магнит өрісінің айналу бағытын екі фазалық сымдардың орындарын алмастыру арқылы өзгертсек, онда ол өріс роторға тежеу әрекетін көрсетеді. Ротор магниттік өріске қарсы айналғандықтан сырғанау s>1 болады. Егер де ротордың сақинасы бар болса, онда қарсы қосу тоғын шектеу үшін, ротор тізбегіне Rкос активтік кедергі қосады.
4.11-суретте ротор тізбегіне әр түрлі Rкос қосымша кедергілер қосылған кездегі қарсы қосу режиміндегі асинхронды машинаның механикалық сипаттамалары келтірілген.
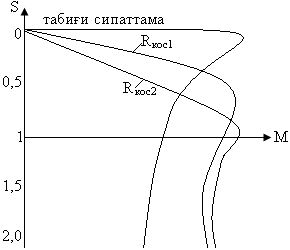
4.11- сурет. Қарсы қосу режиміндегі АҚ-тың механикалық сипаттамалары
Қарсы қосу арқылы тежеу режимі механизмдерді тез тоқтау үшіп қолданады. Оның құндылығы, айналу жылдамдығы аз болған кезде үлкен тежеу моменттерді құруы. Тежеу процесі кезінде қозғалтқыш электр энергияны коректену көзінен алады, ол энергияны қозғалтқыштың және ротор тізбегіне қосылған реостаттың активтік кедергілерінде жылу ретінде бөлініп айналаға тарап кетеді. Ротордың айналу жылдамдығы нөлге дейін төмендеген кезде қозғалтқышты желіден ажырату керек, әйтпесе ротор қарсы бағыт жаққа айналып кетеді.
б)генераторлық тежеу режимі
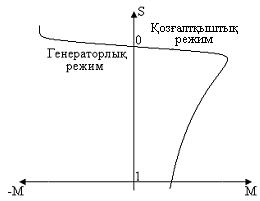
4.12- сурет. Генераторлық режимдегі АҚ-тың механикалық сипаттамасы
Генераторлық тежеу режимі ауыр жүкті түсіру кезінде пайдаланады, мысалы: жүкті кран арқылы түсіру кезінде. Қозғалткыш бұл жағдайда, түсіру бағытқа сәйкес қосылады да, жүктің жылдамдығы синхронды айналу жиілік n1- ге жақын шектеледі, ал жүктің қаныққан энергиясы желіге беріледі.
Қозғалтқыштық режимнен генераторлық режимге, ротордың айналу жиілігі n2-ге, магнит өрісінің айналу жиілігі n1-ден асқан кезінде автоматты түрде өтеді.
Генераторлық режимнің механикалық сипаттамасын қозғалтқыштың механикалық формуласына теріс сырғанауды қою арқылы кұруға болады (4.12-сурет).
Генераторлық режимде қозғалтқыштық режимдегі максималды моменттен 30-40% үлкен болады, себебі генераторлық режимде Е1 > U1, ал сондықтан магниттік ағын және максималды момент күші ұлғаяды.
в) динамикалық тежеу режимі
Динамикалық тежеу режимі кезінде қозғалтқыштың статоры желіден ажыратылады да, екі фазасы тұрақты ток көзіне қосылады (2.22-сурет).
Қаралып отырған режимде асинхрондық машинаның жұмысын сараптасақ статордың орамасынан өтетін Ік қоздыру токты эквиваленттік айнымалы ток Іэкв алмастырады. Эквиваленттік ток магниттік қозғаушы күшті тудырады, яғни Ғэкв = Ғқ , жалпы жағдайда байланысты эквиваленттік айнымалы токтың мәнін анықтаймыз: Iэкв = CIқ, мұндағы коэффициент С статор ормасының қосылу сұлбасына және фазаның орамасына тәуелді.
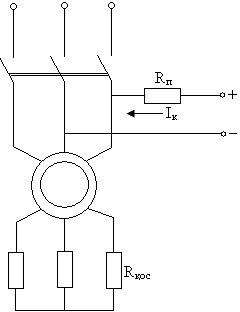
4.13- сурет. Динамикалық тежеу режиміндегі АҚ-тың қосылу сұлбасы
Егер де магниттеуші контурдың индуктивтік кедергісін Хμ = const деп есептесек, онда
Ммакс=  , Sкр =
, Sкр = 
Қаралып отырған режим үшін механикалық сипаттамаларды (4.13-сурет) мына теңдеу бойынша тұрғызуға болады:
М = 
Хт ≥ X1 болғанықтан sкр/кедергі R2 мәні өзгермегенде sкр =  ,
,
неғұрлым аз болады.
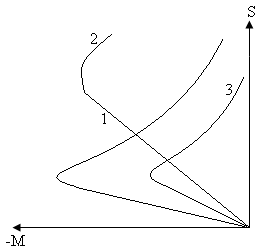
4.14- сурет. Динамикалық тежеу режиміндегі АҚ-тың механикалық сипаттамалары
Динамикалық тежеу моментінің механикалық сипаттамалар түрін реттеуді келесі мәндерді өзгерту арқылы іске асыруға болады:
-статор орамасындағы қоздыру токты Ік: неғұрлым ток Іқ үлкен болса, соғұрлым максималды момент үлкен болады;
-ротор тізбегіндегі қосымша кедергі R қос арқылы, активтік кедергіні: неғұрлым R қос үлкен болса, соғұрлым қисық жоғары жатады.
Мысалы, 4.14-суреттегі қисық 1- қоздыру токқа Ік] және қосымша R қос кедергіге сәйкес; қисық 2 – ІкІ токқа және кедергіге сәйкес; қисық 3 – Іқ токқа және кедергіге сәйкес.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|