- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
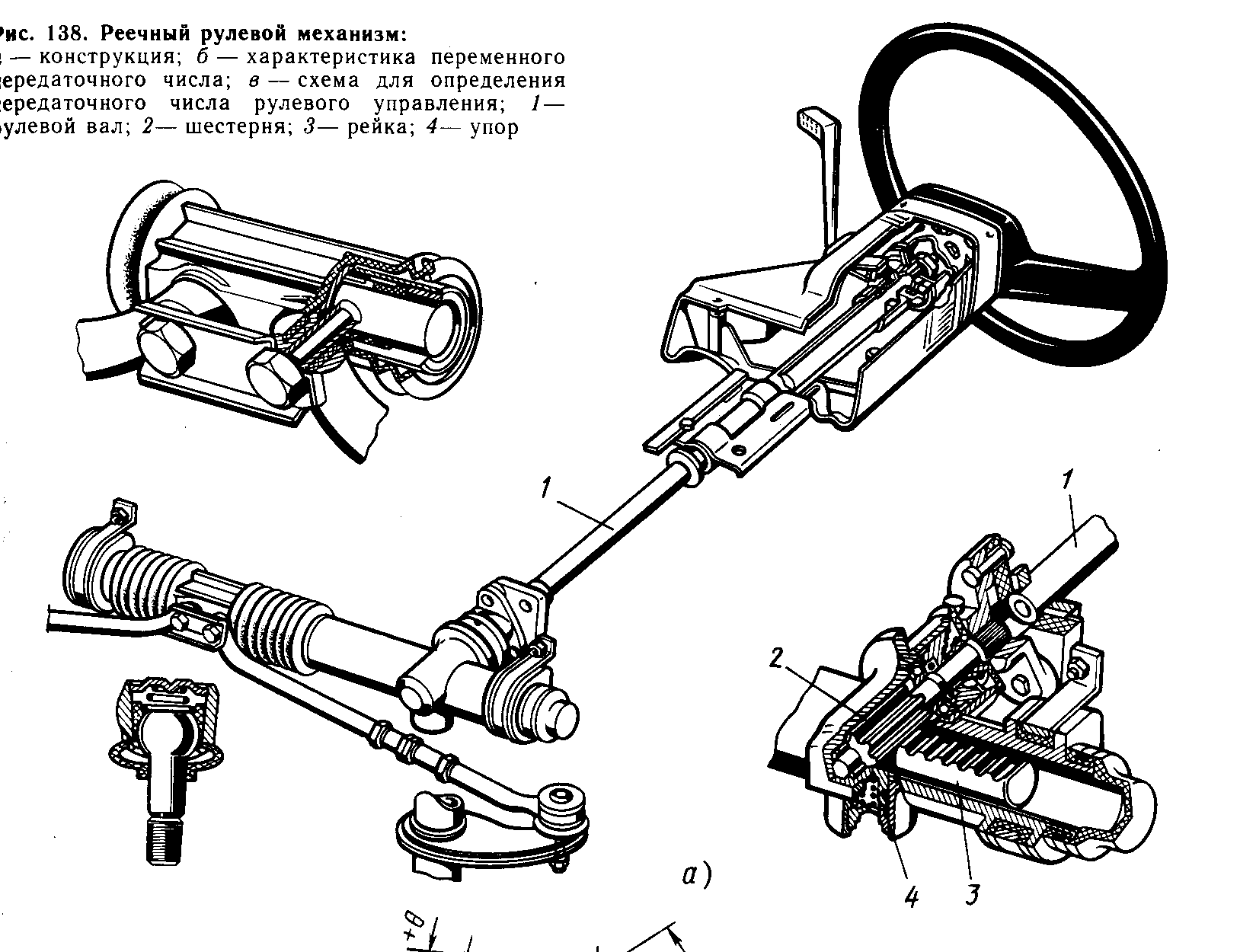
Зарщиков А.М. 8 страница
б) винтореечные рулевые механизмы (применяются широко на автомобилях ЗИЛ, МАЗ, КамАЗ и т.д.):
|
| Рулевая сошка |
| Винт |
| Гайка - рейка |
| Сектор |
| Рулевой вал |
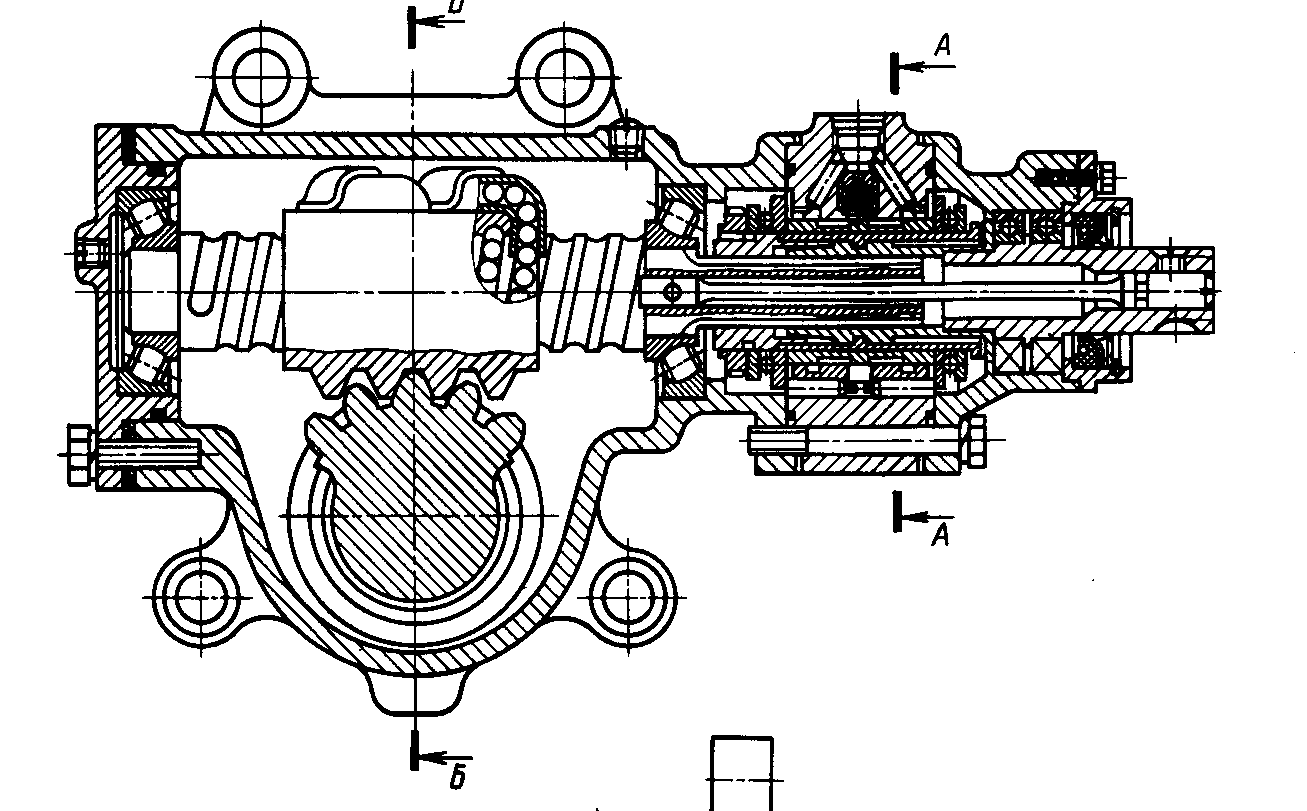
3) Шестеренные (показан реечный рулевой механизм):
|
| Рулевой вал |
| Рейка в корпусе |
| Поворотный рычаг амортизаторной стойки |
| Шестерня |
Другой вид шестеренных рулевых механизмов в виде редуктора из зубчатых колес применяется редко.
4) Кривошипные (практически не применяются).
4. По типу усилителя.
1) С гидравлическим усилителем руля.
2) С пневматическим.
3) С вакуумным.
4) С комбинированным.
Передаточные числа рулевого управления
Передаточное число РУ выбирается исходя из нормированных усилий на рулевом колесе (220…500 Н – максимальное усилие без усилителя) с учетом максимально возможной маневренности и возможности сохранения управления автомобилем при отказе усилителя руля.
Общее передаточное число рулевого управления определяется как произведение передаточного числа рулевого механизма на передаточное число рулевого привода:  .
.
uру – 10…15 у легковых автомобилей;
uру – 20…25 у грузовых и автобусов.
Ввиду низкого значения КПД привода (особенно в обратном направлении от управляемых колес на руль  = 0,4…0,45) принято различать угловое и силовое передаточные числа рулевого управления. Угловое передаточное число определяется как отношение элементарного угла поворота рулевого колеса к углу поворота управляемого колеса:
= 0,4…0,45) принято различать угловое и силовое передаточные числа рулевого управления. Угловое передаточное число определяется как отношение элементарного угла поворота рулевого колеса к углу поворота управляемого колеса:  , силовое передаточное число определяется как отношение момента на управляемом колесе к моменту на рулевом колесе:
, силовое передаточное число определяется как отношение момента на управляемом колесе к моменту на рулевом колесе:  . Во втором случае передаточное число будет меньше из-за потерь на трение:
. Во втором случае передаточное число будет меньше из-за потерь на трение:  .
.
Для компромисса между легкостью управления и минимальными обратными толчками обычно применяют рулевые механизмы червячного и винтового типов, для которых  = 0,8…0,85, = 0,4…0,45. Низкий обратный КПД значительно уменьшает толчки и удары, проходящие от колеса на руль.
= 0,8…0,85, = 0,4…0,45. Низкий обратный КПД значительно уменьшает толчки и удары, проходящие от колеса на руль.
Реечный рулевой механизм также получил распространение на легковых автомобилях из-за удобства компоновки, простоты и технологичности конструкции. Однако, реечный механизм имеет одинаковый КПД в прямом и обратном направлении и поэтому удары со стороны дороги на рулевое колесо чувствительнее. Особенно выгодно сочетание реечного рулевого механизма и усилителя, который противодействует воздействию неровностей дороги.
С целью обеспечения минимальных затрат усилий на рулевом колесе и безопасности управления автомобилем на высоких скоростях предпочтение следует отдавать рулевым механизмам с переменным передаточным числом, изменяющимся по закону:
| uрм |
| Угол поворота рулевого колеса |
| β |
| β' |
| rmax |
| rmin |
β' > β – угол подъема винтовой линии в середине червяка меньше, а значит ролик будет перемещаться на меньший угол за тот же поворот червяка, передаточное число больше.
Такие механизмы позволяют обходиться без применения усилителей у автомобилей с ограниченной нагрузкой на управляемую ось (легковые и малотоннажные грузовые). Для других автомобилей применяют рулевой механизм с постоянным передаточным числом (реечный или винтовой), который обычно дополняется усилителем руля.
Основы расчета деталей РУ на прочность
При расчете силовых характеристик привода и расчетах на прочность деталей обычно исходят из максимального момента сопротивления повороту управляемых колес неподвижного груженого автомобиля на асфальтированной площадке:
 , где Мφ – момент сопротивления повороту колеса относительно середины контакта; Мf – момент сопротивления перекатыванию колеса относительно оси шкворня на плече обкатки
, где Мφ – момент сопротивления повороту колеса относительно середины контакта; Мf – момент сопротивления перекатыванию колеса относительно оси шкворня на плече обкатки  .
.
|
|
| Мφ |
| Мf |
| r0 |
| Направление поворота |
 , здесь 0,132 ∙ r0 – принятое из опыта плечо приложения силы сцепления в контакте. Gось∙ φmax – сила сцепления в контакте (на асфальте φmax = 0,8).
, здесь 0,132 ∙ r0 – принятое из опыта плечо приложения силы сцепления в контакте. Gось∙ φmax – сила сцепления в контакте (на асфальте φmax = 0,8).
 , – плечо обкатки (от середины шкворня до середины контакта колеса с дорогой); f – коэффициент сопротивления качению (Gось∙ f - сила сопротивления качению).
, – плечо обкатки (от середины шкворня до середины контакта колеса с дорогой); f – коэффициент сопротивления качению (Gось∙ f - сила сопротивления качению).
С учетом потерь на трение в приводе:
 . Кроме того, известно:
. Кроме того, известно:
| Rрк |
| Pрк |
 , то есть:
, то есть:
 .
.
Таким образом, подставив в последнее уравнение выражение для момента на управляемом колесе, определяется сила на рулевом колесе. Диаметр рулевого колеса (а значит Rрк) задается отраслевой нормалью (380…500 мм).
Если сила на рулевом колесе получается больше, чем допускается отраслевой нормалью (60…120 Н), то устанавливается усилитель.
Поскольку РУ является очень ответственной системой, расчету подлежат все детали.
1. Рулевое колесо – рассчитывается по напряжению изгиба спиц и напряжению среза и смятия шлицев в ступице.
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| Rрк |
| Pрк |
| l |
 . Сила на рулевом колесе принимается 400 Н для легковых и 700 Н для грузовых. Z – число спиц, WX – момент сопротивления изгибу (для сплошного круглого сечения́ ≈ 0,1d 3).
. Сила на рулевом колесе принимается 400 Н для легковых и 700 Н для грузовых. Z – число спиц, WX – момент сопротивления изгибу (для сплошного круглого сечения́ ≈ 0,1d 3).
Напряжение смятия и среза шлицев определяется, как в сцеплении.
2. Рулевой вал считается на напряжение кручения и угол закручивания:
 100 МПа (Wp – здесь момент сопротивления кручению подставлен для сплошного круглого сечения, а для трубчатого:
100 МПа (Wp – здесь момент сопротивления кручению подставлен для сплошного круглого сечения, а для трубчатого:  ).
).
Допускается угол закручивания вала на один метр длины 5…80.
3. Рулевой механизм.
На примере червячного рулевого механизма:
| β |
| Рокр |
| Qосев |
| Sсм |
| rср |
| β |
| dс |
| Вал сошки |
Червяк давит на ролик в окружном направлении с силой:
 . Окружная сила на угле подъема винтовой линии β создает осевую силу
. Окружная сила на угле подъема винтовой линии β создает осевую силу  . Тогда напряжение смятия поверхности контакта ролика и червяка выразится
. Тогда напряжение смятия поверхности контакта ролика и червяка выразится  300 МПа.
300 МПа.
4. Вал сошки рассчитывается на напряжение кручения
 .
.
5. Сошка считается на сложнонапряженное состояние по сечению 1-1 от силы, действующей на шаровой палец:
 ,
,
 , у прямоугольного сечения
, у прямоугольного сечения  .
.
| l2 |
| Rс |
| l1 |
| l3 |
| D |
| d |
| Pш |
6. Шаровой палец считается на смятие шаровой поверхности и на изгиб по основанию (сечение 2-2):
 ,
,
 .
.
7. Шаровые пальцы рулевого привода рассчитываются по аналогии с пальцем сошки (необходимо учитывать передаточное число рулевого привода).
8. Рулевые тяги считают на растяжение-сжатие и на устойчивости при сжатии с использованием формулы Эйлера.
Материалы: тяги и валы – сталь 30…40; рычаги и сошка – сталь 40, 40Х, 40ХН; шаровые пальцы – 12ХН3, 15НМ; червяк и ролик – 30ХН3А, 20Х или 12ХН3А.
ЛЕКЦИЯ № 17
Тормозное управление
Тормозное управление служит для быстрого уменьшения скорости движения автомобиля до полной его остановки и удержания в неподвижном состоянии на уклоне.
Требования
1. Минимально возможное время срабатывания.
2. Максимальное тормозное замедление.
3. Сохранение управляемости и устойчивости движения в процессе торможения (исключение заноса).
4. Малые затраты энергии водителем на торможение (в городе происходит 2…3 торможения на один километр пути).
5. Пропорциональность между усилием на педали и тормозным моментом на колесах.
6. Плавность срабатывания тормозов.
7. Сохранение эффективности торможения при длительном непрерывном или циклическом процессах торможения.
8. Сохранение тормозных качеств не ниже номинальных в процессе длительной эксплуатации тормозов.
9. Автоматическое затормаживание прицепных звеньев автопоезда при отрыве от тягача в процессе движения.
Классификация
1. По назначению
1) Основная тормозная система (служебная).
2) Стояночная тормозная система.
3) Вспомогательная (тормоз-замедлитель).
4) Аварийная.
5) Противооткатная (башмаки).
2. По типу тормозного механизма
1) Барабанные колодочные.
2) Барабанные ленточные.
3) Дисковые.
4) Комбинированные.
3. По компоновке
1) Колесные.
2) Полуосевые.
3) Центральные (трансмиссионные).
4. По типу привода
1) С механическим приводом.
2) Гидравлическим.
3) Пневматическим.
4) Электрическим.
5) Комбинированным.
5. По типу усилителя привода
1) Без усилителя.
2) Вакуумный усилитель.
3) Пневматический усилитель.
4) Электрический усилитель.
Выбор основных параметров колодочных тормозных механизмов
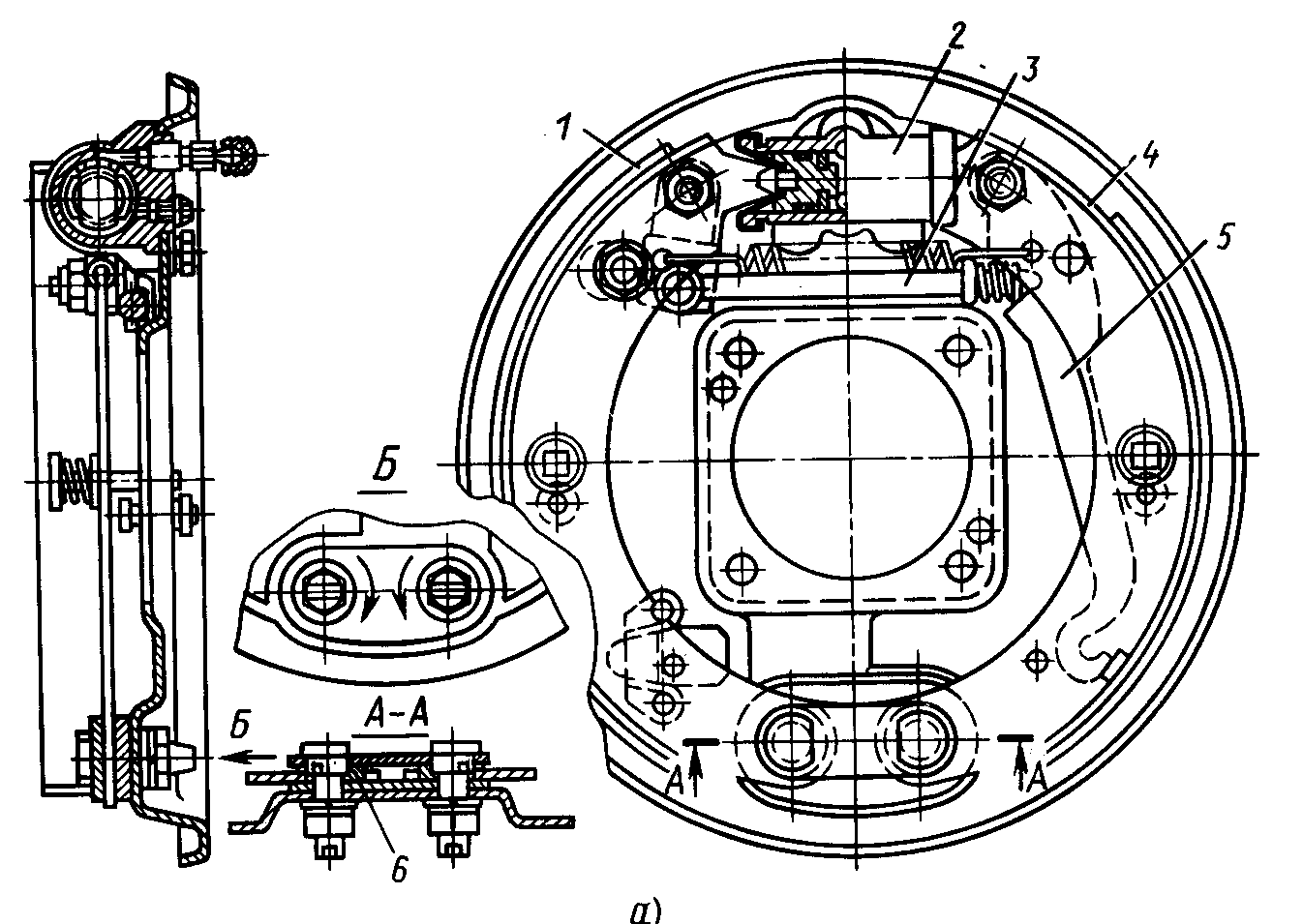
Схема барабанного колодочного тормозного механизма (гидравл.):
| Р1 |
| Р2 |
| b |
| a |
| y2 |
| y2∙μ |
| y1∙μ |
| y1 |
| β2 |
| β1 |
| c |
| c |
| R |
| R |
Чертеж барабанного колодочного тормозного механизма (гидравл.):
|
Из условий сцепления колеса с опорной поверхностью максимальный потребный тормозной момент определится:
 (1)
(1)
здесь mT – величина перераспределения нормальной нагрузки на ось при торможении (1,2…1,4).
Для двухколодочного тормоза тормозной момент, развиваемый тормозным механизмом равен сумме тормозных моментов, развиваемых каждой колодкой:
 (2)
(2)
Для оценки привода формулу (2) надо раскрыть и представить в более общем виде. Для этого надо найти выражения для у1 и у2 и подставить в формулу (2).
Из рисунка видно:
 ,
,
 ,
,
 . (3)
. (3)
Аналогично для правой колодки:
 (4)
(4)
Подставляя (3) и (4) в (2) получим:
 (5)
(5)
Это важное уравнение для решения ряда задач. МТ – известно из условий сцепления по формуле (1). Подставив МТ в (5) можно определить требуемые величины разжимных сил и геометрические параметры тормозного механизма.
Например, для расчета тормозного привода надо знать потребные разжимные усилия Р1 и Р2 ,которые позволят реализовать МТmax.
1. При использовании гидравлического привода тормозов или разжимного кулака плавающего типа, разжимные силы Р1 = Р2 = Р.
В таком случае в уравнении (5) разжимное усилие Р можно вынести за скобки и выразить, как неизвестное, а вместо МТ подставить его выражение по уравнению (1):
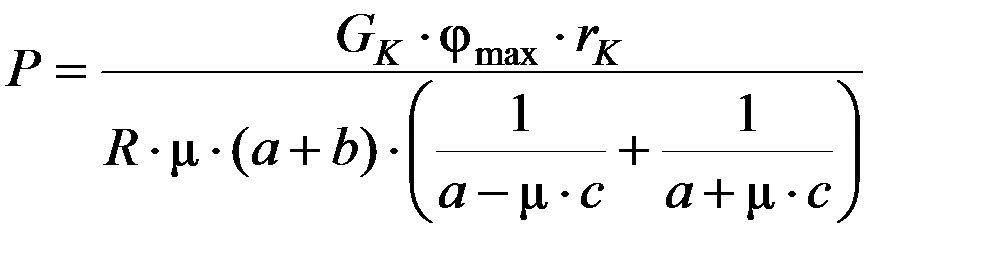 (6)
(6)
Подставив в (6) значения параметров определяется численное значение силы Р. Подставляя эту величину в (3) и (4) рассчитывают y1 и y2.
2. Для разжимного механизма с жестким кулаком (тормозной механизм барабанный колодочный с пневматическим приводом на рисунке внизу) после приработки фрикционных накладок выравниваются результирующие нормальных сил (y1 и y2), а силы Р1 и Р2 будут разными.
В уравнениях (3) и (4) для данного случая левые части получаются равными, можно приравнять правые и выразить Р2 через Р1:
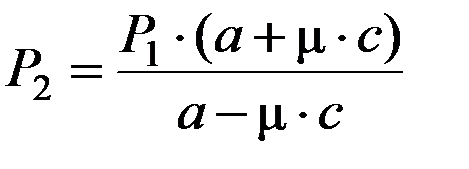 (7)
(7)
Уравнение (7) подставляем в (5) и решаем относительно Р1. Далее, подставив численные значения параметров в это уравнение находим численное значение Р1. Затем, подставив численное значение Р1 в (7), определяем численное значение Р2 . Подставляя численные значения Р1 и Р2 в уравнения (3) и (4) можно получить значения сил нормального давления на фрикционные поверхности y1 и y2.
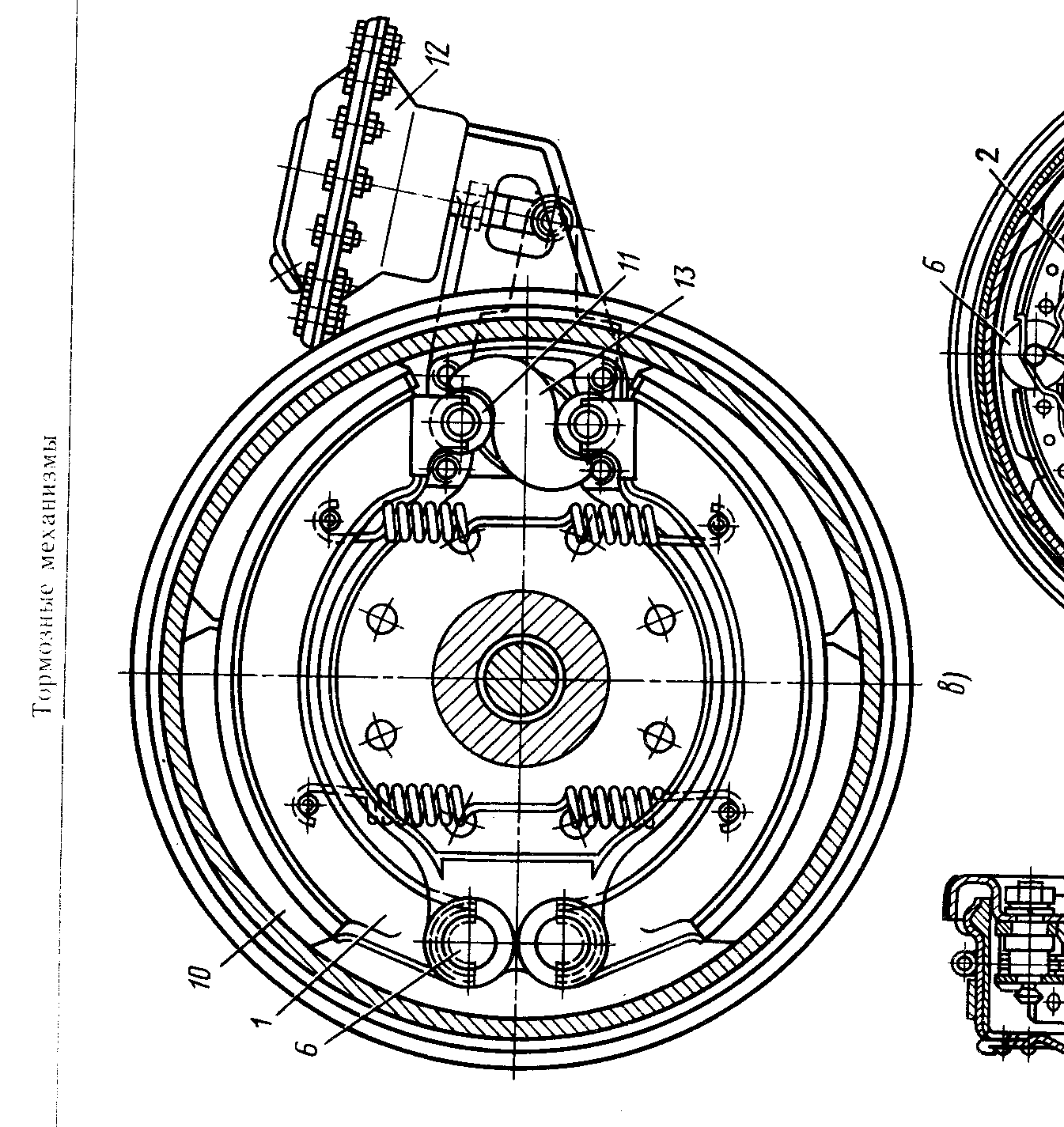
|
| y1 |
| y2 |
| P2 |
| P1 |
Оценка работоспособности тормозного механизма
После подбора и расчета основных параметров тормозного механизма (см. предыдущий раздел) необходимо произвести оценку удачности выбора параметров. Оценка производится, как в сцеплении, по трем параметрам:
1. Проверка по величине нормального давления на фрикционные накладки.
 0,2…0,25 МПа.
0,2…0,25 МПа.
 - площадь накладки (R – радиус тормозного барабана; β – угол обхвата накладки; в – ширина накладки.
- площадь накладки (R – радиус тормозного барабана; β – угол обхвата накладки; в – ширина накладки.
При больших значениях давления необходимо увеличить площадь накладки.
В тормозном механизме с гидравлическим приводом силы y1 и y2 разные ( на рисунке в начале предыдущего раздела y1 > y2 , поскольку y1 активная в нашем случае вращения колеса. Она дожимается к тормозному барабану моментом от сил трения, а другая колодка наоборот отталкивается моментом трения от барабана).
С целью выравнивания интенсивности износа накладки на активной колодке ее делают больше по сравнению со второй. Пропорция в этом случае выдерживается такая:
 .
.
Для тормозного механизма пневматического привода (с разжимным кулаком) β1 = β2, поскольку y1 = y2 .
2. Проверка по удельной работе трения:
 ≤ [Aуд] = 0,5…1,0 МДж/м2 - у легковых автомобилей, 0,7…2,0 - у грузовых и автобусов.
≤ [Aуд] = 0,5…1,0 МДж/м2 - у легковых автомобилей, 0,7…2,0 - у грузовых и автобусов.
Полная работа трения АБ, выделенная во всех тормозных механизмах автомобиля при его остановке со скорости 30 км/ч приравнивается к его кинетической энергии WK при этой скорости:
 .
.
∑SH – суммарная площадь накладок во всех тормозящих колесах.
3. Проверка по теплонапряженности производится определением приращения температуры тормозным барабаном за одно торможение до полной остановки со скорости 30 км/ч:
 200С.
200С.
МБ – масса одного тормозного барабана; Z – количество тормозных барабанов на автомобиле; СБ – теплоемкость металла барабана (482 Дж/кг∙градус).
Расчет тормозного привода
Гидравлический привод
| Р |
| Р |
| РГ |
| РН |
| а |
| в |
| РЦ |
| ГЦ |
1. Расчет диаметра рабочего (колесного) тормозного цилиндра гидравлической тормозной системы производится исходя из нормированного давления жидкости q = 8…10 МПа, определяемого прочностью гибких тормозных шлангов:
 ,
,
q – давление жидкости в системе,Sрц – площадь рабочего цилиндра, d – диаметр рабочего цилиндра.
Из этого уравнения можно определить диаметр рабочего цилиндра:
 .
.
Чтобы создать такое давление q в системе, главному цилиндру нужна площадь S = РГ / q. Сила РГ, развиваемая на главном тормозном цилиндре определяется произведением нормированной по ГОСТу силой на педали РН (максимально 500 Н – у легковых, 700 Н – у грузовых) на передаточное число по педали:  и КПД педали ηП.
и КПД педали ηП.
Записав формулой выше сказанное, имеем:
 ,
,
отсюда диаметр главного тормозного цилиндра:
 , КПД по педали (ηП) = 0,92…0,95.
, КПД по педали (ηП) = 0,92…0,95.
Ход поршня главного тормозного цилиндр определяется ходами рабочих тормозных цилиндров, отношением диаметров цилиндров и податливостью трубопроводов ( в основном резиновой части).
Пневматический привод
(с жестким кулаком)
| РК |
| qв |
| Р1 |
| Р2 |
| М |
| l |
| l1 |
М– момент поворота кулака  ; РК – сила на штоке тормозной камеры; Р1 и Р2 – разжимные силы; qв – давление воздуха в системе (обычно qв max – 0,6 МПа). Разжимной момент М можно выразить и через разжимные силы:
; РК – сила на штоке тормозной камеры; Р1 и Р2 – разжимные силы; qв – давление воздуха в системе (обычно qв max – 0,6 МПа). Разжимной момент М можно выразить и через разжимные силы:

В последнее уравнение вместо момента можно подставить его выражение , а РК записать, как:  , тогда получим:
, тогда получим:

 , здесь S – эффективная площадь тормозной камеры, η – 0,95, Р1 + Р2 – находится из расчета тормозного механизма (стр. 131).Из последнего уравнения можно определить требуемую площадь тормозной пневмокамеры для создания максимального по условиям сцепления тормозного момента.
, здесь S – эффективная площадь тормозной камеры, η – 0,95, Р1 + Р2 – находится из расчета тормозного механизма (стр. 131).Из последнего уравнения можно определить требуемую площадь тормозной пневмокамеры для создания максимального по условиям сцепления тормозного момента.
Список использованной литературы:
1. Приходько Г.К., конспект, записанный на лекциях по курсу "Автомобиль. Анализ конструкций, элементы расчета", СибАДИ, 1985
2. Осепчугов В.В., Фрумкин А.К. Автомобиль. Анализ конструкций, элементы расчета. Учебник для вузов по специальности "Автомобиль и автомобильное хозяйство", М.: Машиностроение, 1989, 304 с.
3. Лукин П.П., Гаспарянц Г.А., Родионов В.Ф. Конструирование и расчет автомобиля. Учебник для вузов по специальности "Автомобили и тракторы", М.: Машиностроение, 1984, 376 с.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|