- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Электрлік жетек механикасының негізі
АЛҒЫ СӨЗ
Электр энергиясын механикалық энергияға айналдыратын машиналарды электр қозғалтқыштар деп атайды. Электр қозғалтқыштар тұрақты және айнымалы электр тоғына арналып шығарылады. Олар негізінен механикалық энергия көзі ретінде өндірістегі, темір жолдағы, автомобиль, теңіз, әуе және ғарыш көліктеріндегі, ауыл және тұрмыс шаруашылықтардағы мыңдаған машиналар мен тетіктерді қозғалысқа келтіреді.
Электр қозғалтқыштар жұмысшы машиналарды немесе механизмдерді қозғалысқа келтіруге және сол қозғалыс пен технологиялық процестерді басқаруға арналған электрмеханикалық жүйенің, яғни электр жетегінің негізі болып табылады.
Электр жетегі технологиялық процесстермен тығыз байланысты, оның салдары электр жетегіне жетілдіруші әсер етіп келеді. Технологиялық қондырғыларға қойылатын талаптардың үздіксіз артуы электр жетегінің тиісті дамуын, оның элементтік базасының жетілдірілуін қамтамасыз етті.
Өз кезегінде, электр жетегінің дамуы технологиялық ортаға да әсерін тигізді, бұрын болмаған жаңа мүмкіндіктер ашылып, көптеген өндірістерді толық автоматтандыруға қол жетті. Қазіргі күндерде электр жетектері электр энергиясының 70% артығын тұтынады. Күн тәртібіне электр жетектерін тиімді пайдалану мәселесі үздіксіз қойылып келеді.
Сондықтан, электр жетегінің негіздерін оқып үйрену, оның заңдылықтарын біліп игеру электр энергиясын тиімді пайдаланудың алғашқы шарты болады.
Оқу құралында электр жетегінің теориялық негіздері, қозғалыс теңдеулері, механикалық сипаттамалар, бұрыштық жылдамдық пен моментті реттеу, өтпелі процесстер, жұмыс режимдері, электр қозғалтқыштың қуатын таңдау негіздері қарастырылған.
Оқу құралы 5В071800-«Электр энергетикасы», 5В081200-«Ауыл шаруашылығын энергиямен қамтамасыз ету» мамандықтарының қазақ бөлімінде оқитын студенттеріне арналған, сонымен қатар оны басқа да инженерліқ мамандықтар 5В080600-«Аграрлық техника және технология», 5В072400-«Технологиялық машиналар және жабдықтар», 5В0071700- «Жылу энергетикасы» үшін де пайдалануға толығымен болады.
Еңбек қазақ тілінде алғаш жарияланып отырғандықтан кездесетін кемшіліктерді автор сөзсіз мойындайды, оқулықты жетілдіру туралы ой- пікірлеріңізді, ұсыныстарыңызды үлкен ризашылықпен қабылдайды.
ҚАЗҰАУ
Алматы қаласы, Сәтпаев көш., № 7., 6-оқу ғимараты.
«Энергетикалық және ақпараттық жүйелер» факультеті.
Жалпы мағлұматтар
1.1. Электр жетегі ұғымының анықтамасы
Электр жетегі дегеніміз басқарылатын электрмеханикалық жүйе. Бұл жүйенің міндеті электр энергиясын механикалық энергияға және керісінше түрлендіру, сонымен қатар осы процесті басқару.
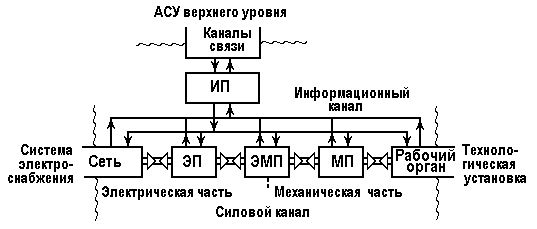
Электр жетегінің күштік және ақпараттық деп аталатын екі арналары бар (1.1-сурет). Бірінші арнамен түрлендіретін энергия тасымалданады (1.1-суреттегі жалпақ жебелер), екінші арна бойынша энергия ағынын басқару, жүйенің күй-қалпы, қызметі туралы мағлұматтарды жинау, өңдеу және ақаулықтарды іздестіру жүзеге асырылады (1.1-суреттегі жіңішке жебелер).
| Байланыс арналары |
| Желі |
| ЭТ |
| ЭМТ |
| МТ |
| Жұмысшы бөлік |
| Жоғарғы деңгейдің автоматты басқару жүйесі |
| Электрмен қамтамасыз ету жүйесі |
| Ақпараттық арна |
| Техноло- гиялық қондырғы |
| Электрлік бөлімі |
| Механикалық бөлімі |
| Күштік арна |
| АТ |
1.1-сурет. Электр жетегінің жалпы құрылымы
Күштік арна электрлік, механикалық бөлімдерден және міндетті түрде байланыстырушы буын-электрмеханикалық түрлендіргіштен құралады.
Күштік арнаның электрлік бөліміне электр түрлендіргіштер ЭТ кіреді. Электр түрлендіргіштер электр энергиясын қоректендіру көзінен, яғни электр желісінен, генератордан, аккумуляторлық батареядан және т.б. электрмеханикалық түрлендіргішке ЭМТ жеткізеді, ал егер қажет болса электр энергиясының параметрлерін түрлендіруді іске асырады.
Механикалық бөлім электрмеханикалық түрлендіргіштің қозғалмалы бөлігінен, механикалық берілістерден МБ, механикалық энергия пайдалы ұқсатылатын қондырғының жұмысшы бөлігінен құралады.
Электр жетегі бір жақтан электрмен жабдықтау жүйесі немесе электрэнергиясы көзімен, екінші жақтан технологиялық қондырғы немесе машинамен және ақпараттық түрлендіргіш АТ арқылы жоғары деңгейлі ақпараттық жүйемен, үшінші жақтан жиі түрде орындаушы-адаммен өзара әрекеттеседі. (1.1-сурет)
Электр жетегі ішкі жүйе ретінде аталған жүйелерге олардың бөлімдері болып кіреді. Нақты алғанда, электрмен жабдықтау, маманын электр жетегі әдетте электр энергиясын тұтынушы ретінде қызықтырса, технолог немесе машиналар конструкторын-механикалық энергия көзі ретінде, АБЖ әзірлейтін және пайдаланатын инженерді оның жүйесін технологиялық процесспен немесе электрмен жабдықтау жүйесімен байланыстырушы жетілдірілген интерфейс ретінде қызықтырады.
Практика жүзінде механикалық энергиямен байланысты, қозғалыспен байланысты барлық процестер электр жетегімен іске асырылады. Тек қана, кейбір электрлік емес қозғалтқыштарды пайдаланатын автономдық көлік құралдары: автомобильдер, ұшақтар, кемелер ғана бұл қатарға кірмейді. Аздаған өндірістік қондырғыларда гидрожетек, ал одан да сирек пневмо жетек пайдаланылады.
Электр жетегінің соншалық кең көлемде таралуы электр энергиясының ең әмбебаб энергия болуымен, оның кез-келген қашықтыққа жеткізілуі мүмкіндігімен, пайдалануға тұрақты дайындығымен, кез-келген энергия түріне жеңіл айналуымен тікелей байланысты.
Бүгінде, аспаптық жүйелерде қуаты микроватт бірлігімен теңесетін электр жетегі пайдаланылса, ал ірі газ станцияларында компрессор қондырғының электр жетегінің қуаты ондаған мегаваттқа жетеді.
Электр жетегінің айналу жиілігінің диапозоны да осындай мөлшерде, мысалы жартылай өткізгіш кристалдарын тартып шығаратын қондырғының қозғалтқышының білігі ондаған сағаттарда қозғалыс бірқалыптылығына қатаң талаптарды орындай отырып бір ғана айналым жасайтын болса, қазіргі заманғы жақсы деген станоктың ажарлаушы дөңгелегінің айналу жиілігі 150000 айн/мин жетеді.
Қазіргі электр жетегінің қолдану аясы шексіз кең, жасанды жүректен адымдаушы экскаваторға, желдеткіштен радиотелескоп антеннасына, кір жуғыш машинадан икемді өндіріс жүйесіне дейін қамтиды. Электр жетегінің технологиялық аямен тығыз өзара әрекеті оның өзіндік ерекшелігі болып табылады және осы жағдай оның дамып жетілуіне қуатты әсер беріп келеді. Технологиялық қондырғылар тарапынан үздіксіз өсіп келе жатқан талаптар электр жетегін жетілдіру, оның элементтік базасын дамыту методикалық негіздерін тереңдету қажеттіліктерін анықтайды. Өз кезегінде дамып келе жатқан электр жетегі технологиялық аяға оң ықпал етеді, бұрын қол жетпеген жаңа мүмкіндіктерді қамтамасыз етеді.
Энергетикалық тұрғыдан алғанда электр жетегі электр энергиясын бас тұтынушы болып табылады, өркендеген елдерде ол барлық өндірілетін электр энергияның 60% артығын тұтынады. Ал, бұл жағдай, энергетикалық ресурстар тапшылығы кезінде электр жетегінде және электр жетегі құралдарында энергия үнемдеудің өткір мәселесін көтереді.
Мамандардың есебі бойынша, мысалы 1 тонна шартты отынды үнемдегеннен, энергетикалық ресурстарды үнемдеу, оны өндіруден екі есе арзанға түседі. Ал келешекте бұл қатынастың өзгеретініне көз жеткізу қиын емес: отын өндіру қиындай түсуде және оның қоры сарқылып барады.
1.2. Электр жетегінің құрамы және міндеттері
Электр жетегінің күштік (энергетикалық) арнасын дәлірек қарастырайық (1.2-сурет). Айталық қуат  желіден (Р1) жұмысшы бөлікке (Р2) беріледі. Бұл процесс басқаруға келеді және қуатты беру мен түрлендіру кезінде күштік арнаның әрбір элементінде шығасылар ∆Р болады.
желіден (Р1) жұмысшы бөлікке (Р2) беріледі. Бұл процесс басқаруға келеді және қуатты беру мен түрлендіру кезінде күштік арнаның әрбір элементінде шығасылар ∆Р болады.

| ЭТ |
| ЭМТ |
| МТ |
| Ж |
| ЖО |
| DРж |
1.2-сурет. Энергетикалық арна
Электрлік түрлендіргіштің ЭТ міндеті қоректендіру көзінен  берілетін кернеуі r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">
берілетін кернеуі r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  ж тоғы
ж тоғы  ж электр энергиясын қозғалтқышқа қажет сипаттары
ж электр энергиясын қозғалтқышқа қажет сипаттары  электр энергиясына түрлендіру. Түрлендіргіштер басқарылмайтын: трансформатор, түзеткіш, параметрлік ток көзі және басқарылатын: мотор-генератор, басқарылатын түзеткіш, жиілік түрлендіргіш болып келеді. Олар, біржақты (түзеткіш) немесе екіжақты (мотор-генератор, екі комплекті тиристоры бар басқарылатын түзеткіш) өткізу қабілеті бар болып келеді. Түрлендіргіштің бір жақты өткізу қабілеті болғанда және энергияның кері ағыны (жүктемеден) болғанда тежелу энергиясын «ағызу» үшін қосымша резистор r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">
электр энергиясына түрлендіру. Түрлендіргіштер басқарылмайтын: трансформатор, түзеткіш, параметрлік ток көзі және басқарылатын: мотор-генератор, басқарылатын түзеткіш, жиілік түрлендіргіш болып келеді. Олар, біржақты (түзеткіш) немесе екіжақты (мотор-генератор, екі комплекті тиристоры бар басқарылатын түзеткіш) өткізу қабілеті бар болып келеді. Түрлендіргіштің бір жақты өткізу қабілеті болғанда және энергияның кері ағыны (жүктемеден) болғанда тежелу энергиясын «ағызу» үшін қосымша резистор r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  пайдаланылады.
пайдаланылады.
Электр механикалық түрлендіргіш ЭМТ (қозғалтқыш) электржетегінде әрқашан болады, электр энергиясын ( ) механикалық энергияға (  ) және керісінше түрлендіреді.
) және керісінше түрлендіреді.
Механикалық түрлендіргіш (беріліс): редуктор, бұрама-бұрандалық қосағы, шығырлар жүйесі, айналшақ-бұлғақ механизм және с.с. қозғалтқыштың моментімен  жылдамдығын
жылдамдығын  технологиялық машинаның жұмысшы бөлігінің ЖБ моментімен
технологиялық машинаның жұмысшы бөлігінің ЖБ моментімен  (күшімен
(күшімен  ) және жылдамдығымен
) және жылдамдығымен  үйлестіруді іске асырады.
үйлестіруді іске асырады.
Түрлендірілетін энергияны сипаттайтын шамалар: кернеулер, токтар, моменттер (күштер), жылдамдықтар электр жетегінің координаталары деп аталады.
Электр жетегінің негізгі міндеті координаторларды басқару болып табылады, яғни оларды технологиялық процесстің талабына сәйкес мәжбүрлі түрде бағытты өзгерту.
Координаталарды басқару электр жетегі элементтерінің құрылымы рұқсат беретін шектерде іске асырылу керек және бұл жүйенің жұмысының сенімділігін қамтамасыз етеді. Бұл рауалы шектер әдетте жабдықтарды шығарушылар мен оларды оңтайлы пайдаланушылар тағайындаған координаталардың номинальды мәндерімен байланысты болады. Дұрыс ұйымдастырылған жүйеде координаталарды (энергия ағынын) басқарғанда барлық элементтердегі шығасылар ∆  азайуға және берілген сәтте жұмысшы бөлікке қажетті қуат жеткізілуі тиіс.
азайуға және берілген сәтте жұмысшы бөлікке қажетті қуат жеткізілуі тиіс.
Осы сұрақтар, яғни әр түрлі электр жетектердің қасиеттері мен сипаттамалары, қалыптасқан-статикалық және өтпелі-динамикалық режимдерде олардың координаталарын қалай дұрыс басқару, энергетикалық қасиеттерді қалай бағалау және ақырында, электр жетегінің күштік бөлімін қалай дұрыс жобалау оқу құралымыздың мазмұнын құрайды. Бұл кітапта электр жетегінің ақпараттың арнасына жататын мәселелер қарастырылмайды. Біздің ойымызша қазіргі техникалық құралдар керек болатын кез-келген ықпал әрекетті іске асыра алады. Біздің көңіл аударып қарайтын мәселеміз - электр жетегінің басқару жүйесі не істеуі қалай істеуі керек, ал тәжірибе жүзінде бұл қалай істелетінін қарастырылмайды.
Электр жетегінің күштік бөлімінің құрылымына көз жүгіртсек зерттелмекші нысанның өте күрделі екенін түсінеміз, мұнда әр текті элементтер: электрлік, электрондық, электр механикалық, механикалық тоғысқан, басқарылатын процесстер де қарапайым емес.... Демек, пәнді оқығандағы тиімділік негізгі құбылыстарды терең түсініп практика үшін маңызды қарапайым мәселелерді шеше білуде болмақ. Бұған бір қатар шарттарды орындағанда қол жеткіземіз.
Біріншіден, нақты, ереже бойынша өте күрделі нысандардың модельдерімен жұмыс істеп үйрену керек, яғни нақты нысанның зерттелетін қасиеттерін шағылыстырып көрсететін жасанды қарапайым нысандармен жұмыс істей білу.
Екіншіден, тек қана қажетті нәрсені шағылыстыратын моделдерді пайдалануға тырысу керек, сонымен қатар қажетті, артық та емес, қарабайыр да емес. Ал бұған айтарлықтай көңіл бөлу керек.
Үшіншіден, қайсыбір моделдің жасалу жағдайын қатаң түрде сипаттау керек. Олай болмағанда, нәтижелердің мән-мағынасы болмайды.
Ең соңында, ең басты мәселені бөліп алып, аса маңызсыз жеке мәселелерді шегіндіре білу керек. Атап айтқанда, бұл кітаптың мақсаты оқушының негізгі принциптерді, өлшемдерді, басты қатынастарды, заңдылықтарды терең түсінуіне және оларды практика жүзінде қолдана білуіне қол жеткізу.
1.3. Электр жетегінің қысқаша тарихы
Электр жетегінің даму тарихы электр машиналарының, аппараттардың, түрлендіргіштердің және басқару құрылғыларының мақсатты түрде табиғи байланысқан үйлесімі және электр жетегін түзетін бөліктерден бастау алады. Сонымен қатар, электр жетегінің энергияны басқарылатын электрмеханикалық түрлендіруді іске асыратын жүйе ретінде өз тарихы бар.
Электр жетегінің дамуы XIX ғасырдың бірінші жартысында жұмыс істеуге қабілетті электр қозғалтқыштардың үлгілерін жасаумен басталды. Электр жетегіне тән элементтермен: механикалық беріліс, басқару бөліктері және с.с. жабдықталған тұрақты ток электр қозғалтқышын іс жүзінде пайдалану 1834-1838 ж. басталды. Онда Нева өзенінің ағысына қарсы қайықтың жүзуі іске асырылды және бұл жұмыс академик Б.С. Якоби атымен байланысты болды. Жұмыс әлемдік белгілік алды, бірақ сол кездегі техникалық құралдардың, ең бастысы қоректену көзі-гальваникалық батарея жетілмегендігінен жарқын өнер тапқыш Б.С. Якоби және оның ізбасарларының жұмыстары кең практикалық қолдану таба алмады. Тек XIX ғасырдың 70 жылдары ғана, практика жүзінде қолдануға болатын тұрақты ток қозғалтқыштары әзірленіп Вена, Париж, Мюнхень көрмелерінде көрсетілді.
Көпшілік электр жетегінің дамуы үшін қажетті жағдайлар XIX ғасыр аяғында 1886 жылы Г.Феррарис пен Н.Тесла ашқан айнымалы магнит өрісі құбылысы арқасында жасалды.
Бұл, айнымалы токтың көп фазалы электр қозғалтқыштарын жасаудың басын ашты және оған ең басты себеп М.О. Доливо-Добровольскийдің атақты жұмыстары болды. Ол 1888 жылы айнымалы ток электр энергиясын берудің үш фазалық жүйесін ойлап тауып ұсынып іске асырды. 1889 жылы статор орамасы таратылған, роторы ақ-тиын дөңгелегі тәріздес қысқа тұйықталған үш фазалы асинхронды қозғалтқышты әзірлеп шығарды.
XIX ғасырдың соңы XX ғасырдың басы электр станцияларын салумен, электр желілерінің дамуымен сипатталады. Электр энергиясын орталықтан өндіру және бөліп тарату өндірістік электр жетегін жасаудың негізін қалады.
Бұрынғы пайдаланып жүрген айыл, арқан көмегімен энергияны механикалық жолмен бөліп тарататын бу немесе су қозғалтқыштары бар топтық жетек орнына топтық электр жетегі келді. Ол жабдықтардың жалпы жайғасуын өзгертпей-ақ әрбір фабрикадағы жеке жылу станциясының, бу қазандарының немесе су доңғалақты гидростанциясының болуын керексіз етіп орталықтандырылған электр жабдықтауға-электр желілеріне негізделді.
Бұл жаңа енгізулер алғашында көпшілікте жете түсінбеушілік туғызды, себебі жабдықтар күрделеніп қымбаттай түсті, энергияны сымдар бойынша едәуір қашықтыққа жеткізгенде елеулі шығасылар болды.
Одан да артық жете түсінбеушілік және қарсылық XX ғасырдың басында жеке, дербес электр жетегіне көшу туралы болды, яғни энергияны механикалық жолмен бөліп таратуды электрлік жолмен ауыстыру, электр қозғалтқышты жұмысшы машинаға жақындату түсінбеушілік туғызды. Мұндай шешімдердің жағымды мысалдары болуына қарамастан XX ғасырдың бірінші ширегі топтық және дербес электр жетегі жақтастары арасындағы күреспен өтті.
25 жылдан артық созылған топтық және дербес электр жетегі жарысының табиғи нәтижесі соңғының барлық жаңадан салынған кәсіпорындарда толық жеңісімен қорытындыланды.
Осылай, электр жетегі механикалық жетектің барлық түрін ығыстырып шығарды. Мысал үшін, электр қозғалтқыштардың қуаты жалпы орнатылған қозғалтқыштардың қуатының 1890 жылы 5 % құраса, 1927ж.-75%, 1950ж-100% жетті.
Жаңа салынған кәсіпорындарда электр жетегінің көптеген әр түрлері пайдаланыла бастады. Аздау және орта қуатты реттелмейтін электр жетектерінде қысқа тұйықталған роторлы асинхронды қозғалтқыштар, ал үлкен қуатты электр жетегінде синхронды қозғалтқыштар орын алды. Реттелетін электр жетегі әр түрлі болып қалыптасты: реостаттық реттегенде немесе магнит өрісін әлсіреткенде қоздыру сұлбалары әр түрлі: тәуелсіз, параллель, тізбектей, аралас тұрақты ток қозғалтқыштары кеңінен пайдаланылды, сондай-ақ фазалы роторлы асинхронды қозғалтқыштар, айнымалы токтың коллекторлық қозғалтқыштары қолданыс тапты.
Орташа және үлкен қуатты реттелетін электр жетектерінде XIX ғасырдың соңында Вард-Леонарда ұсынған жүйе (генератор-қозғалтқыш) көп қолданылды. Жүйе бірнеше электр машиналарынан құралғанымен статика да болсын, динамика да болсын өте жақсы реттеуші мүмкіндіктері болды.
Дербес электр жетегі көптеген технологиялық машиналармен агрегаттардың дамуына, жетілдіруіне үлкен ықпал жасады. Ал, мұның өзі ең бастысы қозғалтқышты жұмысшы бөлікке жақындату арқылы, рабайсыз механикалық берілістерді жою арқылы, жылдамдықты басқарудың механикалық жолынан электрлік әдіске көшу арқылы іске асырылады.
Жұмысқа қабілетті электр жетегін жасағанға дейінгі туындаған автоматты басқару идеясы (Уатт-Ползунов идеясы) 1930 жылдардан бастап электр жетектеріне бейімделіп қарқынды дамыды.
1940 жылдары дербес электр жетегінің электрмеханикалық бөлімі, соның ішінде көп қозғалтқышты электр жетектер қазіргі сипаттарын ала бастады. Олардың ерекшеліктері болып релелік-контакторлық басқару қала берді, дегенмен әр түрлі машиналық, электронды-иондық, магниттік күшейткіштер: пайдаланылатын тұйық құрылымдар қолданылатын үзіліссіз басқару жүйелері енгізіле бастады.
1941 жылдан бастап әскери электр техникасы, атап айтқанда, зеңбірек атысын, радиолакация қозғалысын басқаруға арналған қадағалаушы арнаулы электр жетектері қарқынды дами бастады.
1940 жылдардың ортасында трактор, автомобиль қозғалтқыштарының цилиндр блоктарын өңдейтін станоктардың алғашқы автоматты желілері әзірленді, негізгі және көмекші өндірістік процестері автоматтандырылған завод-автоматтар пайда болды.
1935 жылы, қазіргі кең таралған статикалық түрлендіргіш –қозғалтқыш жүйесі бойынша реттелетін электр жетектердің алғашқы түрлері тиратрон түрлендіргішті электр жетектер шығарыла бастады. 1949 жылдан бастап прокаттық стандардың басты жетегі ретінде сынап түзеткіштері бар электр жетектері кеңінен ендіріледі.
1948-1950 жылдары прокаттық стандардың бас асинхронды қозғалтқышының ротор тізбегіне басқарылатын сынап түзеткіш енгізілген вентильдік каскадтар шығарылды. Осы жылдары электр жетегінің дамуына салмақты үлес қосқан ғылыми-зерттеу және жобалау-конструкторлық ұйымдар қалыптасты.
1950 жылдардың ортасында электр жетегінің теориясы мен практикасы қалыптасып бірнеше оқулықтар жарық көрді. 1953 жылы баспадан шыққан М.Г. Чиликин «Общий курс электропривода» алты рет қайталап шығарылып мамандар дайындауға салмақты үлес қосты.
АҚШ-та жинақты машина негізінде энергияны электр механикалық түрлендіру теориясының негізі қаланды, ол теория соңынан басқарылатын электр жетегін дайындау практикасында кеңінен пайдаланылды.
Соғыстан кейінгі жылдары әлемнің жетекші зертханаларында күштік электроника саласында алға шығу болды, ол дегеніңіз техниканың көп саласын түбегейлі өзгертті, атап айтқанда, электр жетегінде де айтарлықтай өзгеріс болды. 1948 жылы Дж Бардин мен В.Браттейн (АҚШ) алғашқы транзисторларды шығарды. Электр жетегі техникасына транзисторлар негізінде жасалған электрондық басқарылатын кілттер енгізіле бастады.
1955 жылы Дж. Молл, М.Танненбаум, Дж. Голдей және Голоньяк (АҚШ) күш салумен жасалған қуатты жартылай басқарылатын кілт-тиристор электр жетегі техникасына батыл ықпал етті. Мыңдаған вольт кернеумен үлкен токтарға арналған тиристорлардың пайда болуы рабайсыз, сенімсіз және үнемсіз сынап түзеткізгіштерден және тиратрондардан бас тартып, тұрақты ток электр жетегі тізбектерінде басқарылатын тиристорлық түзеткіштер қолдануға жол берді.
1970 жылдардың басында Ф.Блашке жариялаған жұмыстар векторлық басқару (трансвектор жүйесі) деп аталатын магнит өрісі бойынша бағдарланатын асинхронды электр жетегі жүйесін жасаудың басын ашты
1940 жылдардың басында А.А. Булгаков, М.П. Костенко бастаған келешегі бар жиілікті-реттелетін электр жетегі саласындағы жұмыстар жалғасып дами түсті. А.С. Сандлер және оның шәкірттерінің жұмыстарында 1970 жылдары тиристорлық негізде жиілік-түрлендіргіштер құру сұрақтары қарастырылды, жиілік түрлендіргіші бар электр жетегін автоматты басқару принциптері қалыптастырылып, бөлшектеп зерттелді.
1960-1970 жылдары М.Г. Чиликиннің жетекшілігімен адымдық қозғалтқышты дискреттік электр жетектерін әзірлеу бойынша қарқынды зерттеулер жүргізілді. Дискретті электр жетектер, машина жасау, станок жасау және өндірістің басқа салаларына кеңінен енгізіліп, техникалық жұртшылықтың құрметіне ие болды, реттелетін электр жетегінің жаңа түрлерін әрі қарай жетілдіруге негіз болды.
Осы кезеңде вентилді қозғалтқыштық электр жетегі дамыды, олар да коллектор ораманы түйістіріп-ажырататын жартылай өткізгіштер ротор орналасуына тәуелді басқарылатын кілттер тобымен ауыстырылды.
Транзисторлар және оның негізіндегі көптеген құрылғылар электр жетегін басқару жүйелері облысында бір қатар тиімді идеяларды практика жүзінде іске асыруға мүмкіндік берді.
1950 жылдар ортасында Кесслер (Германия) ұсынған электр жетегі координаторларын ілесінше түзетуі бар бағынышты реттеу идеясы ең бір жемісті болды. 1960-1970 жылдары өндірісте кең қолдану тапқан электр жетегін басқару құралдары кешені-«УБСР-АИ» аналогтық және «УБСР-ДИ» сандық салалары жасалды.
1960-1970 жылдар шегінде АҚШ-та шығарылған төрт разрядты бір кристалды микропроцессор INTEL 4004 және бағдарламаланатын логикалық контроллер (ПЛК) РДР 14 электр жетегін басқару саласында жаңа кезеңнің басталуын белгіледі. 1970 жылдарынан бастап бұл құралдар әлемдік практикада бұрынғы қолданып жүрген түйіспелі және түйіспесіз релелерді қарқынды түрде ығыстырып шығара бастады. Ал 1980 жылдары басқару сұлбасында 8 және одан артық релелер бар жүйелерді ПЛК мен ауыстыру экономикалық тұрғыдан тиімді бола бастады.
Басқарудың микропроцессорлық құралдарымен ПЛК дамуына қарай электр жетегінің ақпараттық бөлімі күрт өзгерді: координаторларды басқаруда функционалдық мүмкіндіктер өсе түсті, бірнеше жүйелердің өзара және сыртқы ортамен өзара әрекеттер мүмкіндіктері, нақтылы ақау іздеу, электр жетектің барлық элементтерін кез-келген қалаусыз әрекеттерден қорғау мүмкіндіктері көтерілді. Соңғы 10-15 жылдар нарыққа шыққан 600А токқа, 1200 В кернеуге, 30 кГц жиілікке арналған толық басқарылатын кілттер және оларды басқару құралдары, яғни күштік арнаның жаңа элементтік базасы электр жетегінің дамуына консептуалдық өзгеріс әкелді. Осы аспаптар шапшаң кері диодтары бар модулдарға біріктіріліп жиілік түрлендіргіштер құруға негіз болды. Түрлендіргіштер құрылымы басқарылмайтын түзеткіш-L-C фильтр-ендік-импульстік модуляциялы автономдық инвертор (ШИМ) болып түзілді. Бұл деген қуаты 600 кВт дейінгі айнымалы токтың реттелетін электр жетегіндегі негізгі техникалық шешім болды. Соңғы жылдары 3600 А токқа, 6500 В кернеуге арналған IGBT модулдері нарыққа шығарыла бастады.
Басқа да дәстүрлі емес электр машиналарымен қатар реттелетін электр жетегінің жаңа түрі – вентилдік – индукторлық жетектер қарқынды игеріліп келеді.
Өте кішкентай роботтардың микрожетектерінде жұқа қабықшалы диэлектриктік қозғалтқыштар қолданылуда.
Соңғы жылдары әлемде реттелмейтін электр жетегінен реттелетін электр жетегіне көшу үрдісі қалыптасып дамып келеді. Реттелетін электр жетегін сораптарда, желдеткіштерде, конвейрлерде және т.б. жаппай қолдану жабдықтарының технологиялық деңгейін күрт көтеріп, қомақты энергетикалық ресурстарды үнемдеуге мүмкіндік ашты.
1.4. Жаттығулар
1.4.1. Айналаңызда электр жетегі қолданылатын көптеген құрылғылар бар. Солардан жақсы білетін біреуін таңдап алып 1.1. суреттегі көрсетілген блоктарды, байланыстарды, техниканың көршілес облыстарымен және шекараларды тауып көріңіз.
1.4.2. Электр жетегі құрамына ақпараттық арна (1.1-сурет) немесе энергия ағынын басқарушы кейбір жүйе енеді. Әдебиеттерде екі әр түрлі сөздерді кездестіруге болады: «Электр жетегін басқару сұлбасы» және «электр жетектің басқару сұлбасы». Бұл сөздер тең мағыналы ма? Қайсысы дәлірек?
1.4.3. Күштік электроника саласындағы мамандар кей-кезде электр жетегі деп электрондық түрлендіргішті айтады. (1.1. сурет), электр машиналары саласындағы мамандар жиі электр жетегі деп «әлдебір нәрселер тіркелген» машинаны айтады. Осы анықтамаларға қандай түсініктемелер бересіз?
1.4.4. Қазіргі заманғы электр жетегінің дамуының негізгі кезеңдерін көрсететін қысқаша реферат жазып қарастырыңыз.
1.5. Түйін
Электр жетегі - электрмеханикалық (міндетті түрде), электрлік, механикалық түрлендіргіштердің және басқарушы (ақпараттық) бөлімдерден құралған жүйе, электр энергиясын механикалық энергияға және керісінше басқарылатын түрлендіруді іске асырады, электрмен жабдықтау жүйесімен, жұмысшы машинасымен, жоғары деңгейлі басқару жүйесімен өзара әрекеттесді.
Қуаты мен айналу жиілігінің диапазоны 1012 артылады.
Электр жетегі практика жүзінде технологиялардың барлық түрлерінде қолданылады, тек қана электрлік емес қозғалтқыштар пайдаланылатын салалар (авто көлік және с.с.) ғана бұған кірмейді.
Электр жетегі барлық өндірілетін электр энергиясының 70% артығын тұтынады.
2. Электрлік жетек механикасының негізі
2.1. Қозғалыс теңдеуі
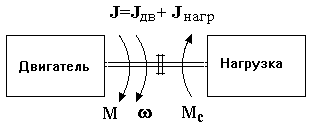
Қозғалтқыштың роторынан және онымен тікелей байланысқан жүктемеден - машинаның жұмысшы бөлігінен құралған ең қарапайым механикалық жүйені қарастырайық (2.1.-сурет). Бұл жүйе толығымен нақтылы: атап айтқанда бір қатар сораптардың, желдеткіштердің, көптеген басқадай машиналардың механикалық бөлімі осылайша іске асырылған.r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>"> 
| қозғалтқыш |
| жүктеме |
| J=Jқозғ+Jжүкт |
2.1.-сурет. Механикалық бөлімнің моделі
Суреттегі жүйеге екі момент түсірілген деп есептейік: бірі қозғалтқыш тудыратын электрмагниттік момент М, екіншісі жүктеме, механикалық бөлімдегі (үйкеліс) шығасылдар тудыратын статикалық момент Мс, әр бір моменттің өз мәні және бағыты бар. Жүйенің қозғалысы Ньютонның екінші заңымен анықталады:
 (2.1.)
(2.1.)
мұндағы -бұрыштық жылдамдық; r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  -жинақ инерция моменті;
-жинақ инерция моменті;
(2.1.) теңдеудің оң бөлімі -  дин, динамикалық момент болады. Ол,
дин, динамикалық момент болады. Ол,  с моменттердің алгебралық қосындысы нөлден басқа болғанда туындайды, динамикалық моменттің таңбасы мен мәні үдеуді анықтайды.
с моменттердің алгебралық қосындысы нөлден басқа болғанда туындайды, динамикалық моменттің таңбасы мен мәні үдеуді анықтайды.
 яғни с моменттері тең және қарсы бағытталған режимдер қалыптасқан немесе статикалық деп аталады, оларға
яғни с моменттері тең және қарсы бағытталған режимдер қалыптасқан немесе статикалық деп аталады, оларға  , соның ішінде
, соның ішінде 
 сәйкес келеді.
сәйкес келеді.
 өткелі немесе динамикалық деп аталады (үдеу, баяулау).
өткелі немесе динамикалық деп аталады (үдеу, баяулау).
(2.1.) теңдеудегі r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  с моменті практика жүзінде толығымен жүктеменің қасиеттерімен анықталады, ал
с моменті практика жүзінде толығымен жүктеменің қасиеттерімен анықталады, ал  моментін тәуелсіз айнымалы шама ретінде қабылдауға болады, оны қозғалтқыш қалыптастырады. - бұрыштық жылдамдық - тәуелді айнымалы шама,
моментін тәуелсіз айнымалы шама ретінде қабылдауға болады, оны қозғалтқыш қалыптастырады. - бұрыштық жылдамдық - тәуелді айнымалы шама,  динамикалық режимдерде кез-келген нақты жағдайлар үшін (2.1.) теңдеуінің шешімінен анықталады, ал статикалық режимдерде мына шарт бойынша табылады
динамикалық режимдерде кез-келген нақты жағдайлар үшін (2.1.) теңдеуінің шешімінен анықталады, ал статикалық режимдерде мына шарт бойынша табылады 
2.2. Механикалық сипаттамалар
(2.1.) теңдеуіндегі с моменттері уақытқа, орналасу жағдайына, жылдамдыққа тәуелді болады. Ең маңыздысы с моменттерінің жылдамдықпен байланысы.
 тәуелділігін қозғалтқыштың механикалық сипаттамасы, ал
тәуелділігін қозғалтқыштың механикалық сипаттамасы, ал  тәуелділігін жүктеменің (механизмнің) механикалық сипаттамасы деп атайды. Электр жетегінің статикалық және динамикалық режим<
тәуелділігін жүктеменің (механизмнің) механикалық сипаттамасы деп атайды. Электр жетегінің статикалық және динамикалық режим<
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|