- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Монтированием каждого маршрута в отдельности.
Монтированием каждого маршрута в отдельности.
1. Каждый маршрут монтируют на отдельную основу – кальку или тонкую бумагу.
2. Средний маршрут приклеивают к общей основе, оставляя неприклеенными его верхнюю и нижнюю части, т. е. зоны поперечного перекрытия.
3. Следующий (смежный с ним ) маршрут располагают так, чтобы в его середине по поперечному перекрытию достигалось максимальное совпадение контуров. Потом его поворачивают так, чтобы совпадали контура на краях. Или чтобы их поперечные отклонения были одинаковы как по величине, так и по знаку.
4. Поперечным смещением маршрута уменьшают эти отклонения наполовину.
5. Продольным сдвигом маршрута добиваются различных по знаку и одинаковых продольных отклонений.
6. Маршрут подклеивают к основе в средней части и разрезают оба маршрута по поперечному перекрытию. После чего приклеивают крайние части к основе.
Контроль фотосхемы, определение ее масштаба, оформление фотосхемы осуществляется описанным выше способом. Оценка точности при этом осуществляется как по продольным порезам, так и по поперечным
Задача 2.1. Изготовить одномаршрутную и многомаршрутную фотосхемы
3.Анализ одиночного снимка
3.1.Зависимость координат точек местности от координат точек снимка
Исходя из рис.3.1 установим зависимость координат точки местности от координат этой же точки, измеренной на снимке .
Исходной примем фотограмметрическую систему координат XYZ.

|

|

Рис. 3.1. Связь координат точек снимка и местности
Вектор  обозначим через RSA, т.е.
обозначим через RSA, т.е.  = RSA. А вектор
= RSA. А вектор  через r, т. е.
через r, т. е.
 = r.
= r.
Введем векторы RА и RS. А вектор RSA запишем дважды в следующем виде
RSA=mr, где m – масштабный фактор и
RSA= RА - RS; (3.1)
Очевидно, что
RА - RS= mr (3.2)
Это есть уравнение коллинеарности векторов. Оно является фундаментальным для установления связей между координатами точек снимка и местности.
Перепишем (3.2) в координатном виде:
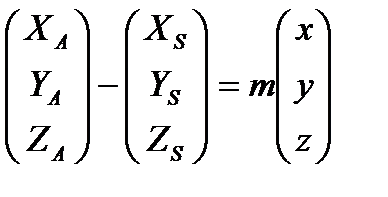 ; (3.3)
; (3.3)
Очевидно, что
XA-XS=mx;
YA-YS=my;
ZA-ZS=mz;
Тогда,
XA=XS+mx; (3.4)
YA=YS+my;
Неизвестный множитель m найдем так:
 ;
;
Тогда формулы (3.4) примут вид
 (3.5)
(3.5)
 (3.6)
(3.6)
Настоящие формулы являются основными для установления зависимости координат точек местности от координат точек снимка.
Только выразим в них координаты x,y через измеренные на снимке и элементы внутреннего и внешнего ориентирования снимка.
Координаты точек снимка x, y, z даны в фотограмметрической системе координат, начало которой перенесено в точку фотографирования S. А снимок находится под наклоном к данной системе координат на углы α, ω, æ.(рис.3.2)

| с |
| с |
Рис.3.2.Первая система внешнего ориентирования снимка
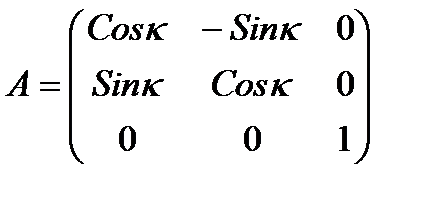
В системе координат снимка координаты точки определяются следующими значениями xc, yc, zc=-f. Задача заключается в том, чтобы от координат xc, yc, zc=-f перейти к координатам x, y, z используя углы наклона снимка α, ω, æ,, называемые еще углами Эйлера. Такой переход осуществляется по формуле
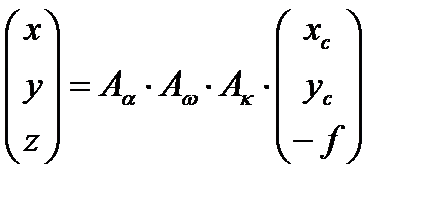 , (3.7)
, (3.7)
где 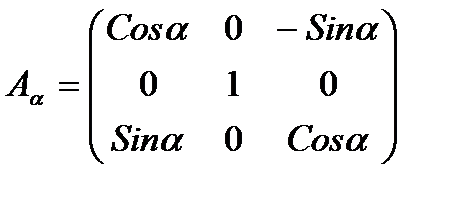 , (3.8)
, (3.8)
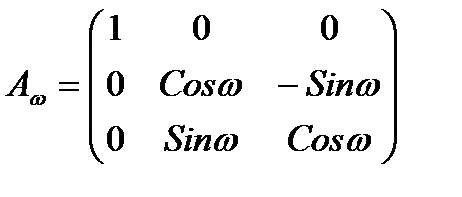 , (3.9)
, (3.9)
 . (3.10)
. (3.10)
Отметим, что матрица
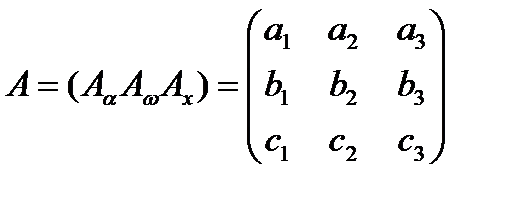
(3.11)
называется матрицей направляющих косинусов.
Таким образом, вычисляя по формуле (3.6) координаты x,y,z и подставляя их в (3.5),(3.6)
находят координаты точки местности в фотограмметрической системе координат.
 (3.12)
(3.12)
 (3.13)
(3.13)
Пример. Пусть xс=80,637мм, yс=2,517мм, α=3º, ω =0, κ=0. cosα=0,998630, sinα=0,0523360. Значения тригонометрических функций берутся в таких задачах с точностью до шестого знака после запятой и с соблюдением шести значащих чисел.
Тогда
Aα=  , Aω=E, Aκ=E, где Е – единичная матрица – матрица с единичными диагональными членами и нулевыми – недиагональными. Тогда А=Аα и в соответствии с (3.6) найдем
, Aω=E, Aκ=E, где Е – единичная матрица – матрица с единичными диагональными членами и нулевыми – недиагональными. Тогда А=Аα и в соответствии с (3.6) найдем
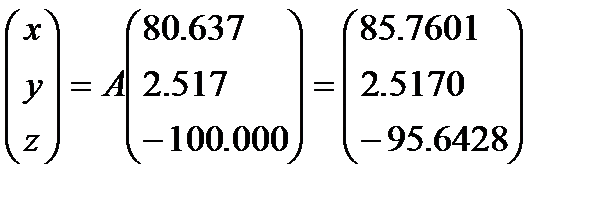
По формулам (3.5),(3.6) окончательно получим
ХА=6426,16+(154,160-1654,17)85,7601/(-95,6428)=7771,176(м),
УА=52346,11+(154,160-1654,17)2,517/(-95,6428)=52385,585(м)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|