- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Теорія електропривода: Підручник / М. Г. Попович, М. Г. Борисюк, В. А. Гаврилюк та ін.; За ред. М. Г. Поповича. – К.: Вища шк., 1993. – 494 с. 2 страница
Рис. 1.10.
Из основного уравнения движения электропривода:
выразим момент двигателя:
Подставляя его в выражение для потерь энергии в переходных процессах (1.18), получим:
 , т.к. характеристика динамического торможения при
, т.к. характеристика динамического торможения при  проходит через ноль.
проходит через ноль.
При электродинамическом торможении под нагрузкой потери будут меньше чем без нагрузки. Для точного их определения необходимо знать аналитическое выражение для кривой изменения скорости  при торможении.
при торможении.
Литература: 1, с. 440-445; 3, с. 483-491.
СРС: Привести энергетическую диаграмму ДПТ.
Литература: 1, с. 440-445; 3, с. 483-491.
Контрольные вопросы:
1. Как выразить потери энергии при любой нагрузке в установившихся режимах.
2. Как выразить потери энергии в переходных режимах через механические координаты электропривода?
3. Определите потери энергии в регулируемом электроприводе.
4. Чему равны потери энергии при пуске?
5. Чему равны потери энергии при динамическом торможении?
ЛЕКЦИЯ 3
Анализ потерь энергии в типовых переходных режимах работы электропривода
5. Потери при торможении противовключением без нагрузки (  ).
).
При торможении двигателя противовключением без нагрузки скорость изменяется от  до
до  , как показано на рис. 1.11:
, как показано на рис. 1.11:

Рис. 1.11.
Необходимо также отметить, что торможение противовключением осуществляется на характеристике, имеющей скорость идеального холостого хода  .
.
Из основного уравнения движения электропривода:
выразим момент двигателя:

Подставляя его в выражение для потерь энергии в переходных процессах (3.18), получим:

При торможении противовключением энергия, потребляемая из сети  и кинетическая энергия движущихся масс электропривода
и кинетическая энергия движущихся масс электропривода  рассеивается в виде тепла в обмотках двигателя и на тормозном сопротивлении.
рассеивается в виде тепла в обмотках двигателя и на тормозном сопротивлении.
6. Потери при торможении противовключением под нагрузкой(  ).
).
При торможении двигателя противовключением под нагрузкойскорость изменяется от  до , как показано на рис. 1.12.
до , как показано на рис. 1.12.
Торможение противовключением осуществляется на характеристике, имеющей скорость идеального холостого хода .
Из основного уравнения движения электропривода:
выразим момент двигателя:
Рис. 1.12
Подставляя его в выражение для потерь энергии в переходных процессах (1.18), получим:
При наличии  силы сопротивления и трения помогают в формировании тормозного момента, поэтому при торможении противовключением под нагрузкой суммарные потери энергии уменьшаются. Для точного подсчета величины потерь необходимо знать зависимость при торможении.
силы сопротивления и трения помогают в формировании тормозного момента, поэтому при торможении противовключением под нагрузкой суммарные потери энергии уменьшаются. Для точного подсчета величины потерь необходимо знать зависимость при торможении.
7. Потери энергии при реверсе без нагрузки ( ).
При реверсе двигателя без нагрузки его скорость изменяется от до  , как показано на рис. 1.13.
, как показано на рис. 1.13.
Реверс двигателя осуществляется на характеристике, имеющей скорость идеального холостого хода .
Из основного уравнения движения электропривода:
выразим момент двигателя:

Рис. 1.13
Подставляя момент двигателя в выражение для потерь энергии в переходных процессах (1.18), получим:
 Потери энергии при реверсировании равны четырехкратному запасу кинетической энергии системы. Они представляют сумму потерь в двигателе при торможении противовключением
Потери энергии при реверсировании равны четырехкратному запасу кинетической энергии системы. Они представляют сумму потерь в двигателе при торможении противовключением  и разгоне двигателя вхолостую .
и разгоне двигателя вхолостую .
Потери энергии в типовых переходных режимах в приводах с АД.
Общее выражение для потерь в приводах с АД.
Основные потери в АД при переходных режимах имеют место в электрических цепях статора и ротора. Потери в стали и механические потери малы по сравнению с электрическими потерями в обмотках и не учитываются.
 (1.19)
(1.19)
где  ,
,  – мощность электрических потерь в обмотках статора и ротора АД.
– мощность электрических потерь в обмотках статора и ротора АД.
Принебрегая током холостого хода, получим  и уравнение потерь в переходных режимах (1.19) запишется:
и уравнение потерь в переходных режимах (1.19) запишется:
 (1.20)
(1.20)
Получим выражение для потерь энергии в переходных режимах при через скольжение АД, поскольку потери в роторе удобно выразить через скольжение:
 (1.21)
(1.21)
где  – электромагнитная мощность, передаваемая на ротор АД;
– электромагнитная мощность, передаваемая на ротор АД;
 – механическая мощность, развиваемая на роторе.
– механическая мощность, развиваемая на роторе.
Потери электрической мощности в роторной цепи пропорциональны скольжению. Мощность этих потерь называется мощностью скольжения:
 (1.22)
(1.22)
Для дальнейших преобразований в (1.20) выразим  через
через  .
.
Из основного уравнения движения электропривода:
получим момент двигателя, при :
, откуда
Предварительно выразим  через .
через .
Скольжение двигателя:
 , откуда
, откуда
 (1.23)
(1.23)
Найдем дифференциал выражения (1.22):
 , тогда
, тогда
 (1.24)
(1.24)
Подставляя в (1.20) выражения для потерь в роторе (1.21) и для (1.24) , получим искомое выражение для потерь в АД в переходных режимах:
 (1.25)
(1.25)
Потери энергии в АД в основных переходных режимах ( пуске, торможении противовключением и реверсе без нагрузки).
1. Потери энергии при пуске АД без нагрузки ( ) :
При пуске АД скольжение изменяется от  , до
, до  , подставляя пределы интегрирования в (1.25), получим:
, подставляя пределы интегрирования в (1.25), получим:

В полученном выражении первое слагаемое  представляет собой пусковые потери в цепи ротора, равные запасу кинетической энергии вращающихся частей ЭП. В АД с фазным ротором эти потери частично выделяются на обмотках ротора, а частично в пусковом реостате роторной цепи. Величина этих потерь не зависит от величины сопротивления ротора. В АД с короткозамкнутым ротором эти пусковые потери выделяются в обмотке ротора, ограничивая число включений двигателя в час. Второе слагаемое
представляет собой пусковые потери в цепи ротора, равные запасу кинетической энергии вращающихся частей ЭП. В АД с фазным ротором эти потери частично выделяются на обмотках ротора, а частично в пусковом реостате роторной цепи. Величина этих потерь не зависит от величины сопротивления ротора. В АД с короткозамкнутым ротором эти пусковые потери выделяются в обмотке ротора, ограничивая число включений двигателя в час. Второе слагаемое  представляет собой потери в цепи статора.
представляет собой потери в цепи статора.
2. Потери энергии при торможении противовключением без нагрузки ( ) .
При торможении противовключением  ,
,  , поскольку скольжение определяется для статической характеристики на которой производится торможение. Подставляя пределы интегрирования в (1.25):
, поскольку скольжение определяется для статической характеристики на которой производится торможение. Подставляя пределы интегрирования в (1.25):

Потери энергии в роторе АД при торможении противовключением равны трехкратному запасу кинетической энергии вращающихся частей ЭП.
3. Потери энергии при реверсе АД без нагрузки ( ) .
При реверсе АД , , подставляя пределы интегрирования в (1.25), получим:

Потери энергии в роторе АД при реверсе равны четырехкратному запасу кинетической энергии вращающихся частей ЭП.
Потери энергии в статоре АД в переходных режимах зависят от активного сопротивления ротора и уменьшаются при его увеличении.
Литература: 1, с. 445-448; 4, с. 80-83.
СРС: Привести энергетическую диаграмму АД.
Литература: 1, с. 445-448; 4, с. 80-83.
Контрольные вопросы:
1. Определите потери при торможении противовключением без нагрузки.
2. Определите потери при торможении противовключением под нагрузкой.
4. Определите потери энергии в регулируемом электроприводе.
4. Приведите общее выражение для потерь в АД в переходных режимах.?
5. Чему равны потери энергии в переходных режимах в АД?
ЛЕКЦИЯ 4
Потери при пуске двухскоростного асинхронного электродвигателя.
В двухскоростном АД изменение скорости обычно достигается за счет изменения числа пар полюсов секционированной статорной обмотки.
На рис. 1.14 показаны механические характеристики двухскоростного АД при соединении статорной обмотки в “звезду“ (2) и в “двойную звезду” (1).
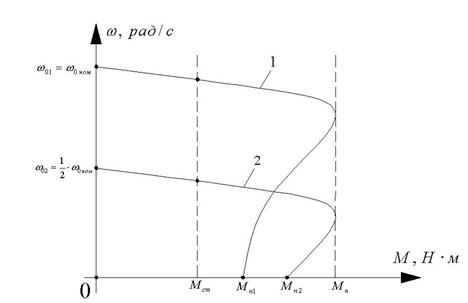
Рис. 1.14
При соединении статорной обмотки в “звезду“ обеспечивается низкая скорость, а при переключении ее на “двойную звезду” число пар полюсов уменьшается вдвое, что приводит к увеличению вдвое скорости холостого хода. Рассмотрим потери в роторе при пуске двухскоростного АД без нагрузки ( ). Потери в статоре будут пропорциональны потерям в роторе, что не изменит общих выводов при анализе.
4.1. Потери при прямом пуске в одну степень на высокую скорость:
a. Пуск АД в две степени:
При пуске на низкую скорость потери составят:

При пуске с низкой скорости на высокую потери составят:

Суммарные потери при пуске в две ступени:
 (1.26)
(1.26)
При ступенчатом пуске двухскоростного асинхронного электродвигателя потери энергии уменьшаются вдвое по сравнению с прямым пуском на высокую скорость.
Потери энергии при плавном пуске электродвигателя
В регулируемом электроприводе имеется возможность путем плавного увеличения задания на скорость, обеспечить плавный пуск двигателя путем изменения напряжения на якоре для ДПТ или частоты питания статорной обмотки АД. Плавный пуск позволяет существенно снизить потери в двигателе при пуске.
На рис.1.15 показаны кривые линейно нарастающего задания с угловым ускорением  -
-  и его отработка двигателем -
и его отработка двигателем -  :
:

Рис. 1.15
На рис. 1.15 показано  – заданное время пуска двигателя.
– заданное время пуска двигателя.
Скорость холостого хода на участке  линейно нарастает с постоянным ускорением :
линейно нарастает с постоянным ускорением :

Значение скорости холостого хода  в конце участка разгона двигателя составит:
в конце участка разгона двигателя составит:
 ,
,
Отсюда ускорение при разгоне выразится : 
Скорость двигателя при разгоне определяется решением дифференциального уравнения движения при линейном нарастании задания:
 (1.27)
(1.27)
где:  – электромеханическая постоянная времени.
– электромеханическая постоянная времени.
При времени переходного процесса  уравнение (4.9) упрощается:
уравнение (4.9) упрощается:
 (1.28)
(1.28)
Разность скоростей задания и двигателя равна:
 (1.29)
(1.29)
Из основного уравнения ЭП выразим момент двигателя при :
(1.30)
Подставляя выражения для разности скоростей момента и в выражение для потерь энергии в переходных процессах (1.18), получим:
 (1.31)
(1.31)
Потери энергии при плавном пуске значительно меньше, чем при ступенчатом пуске и чем большее время пуска  , тем меньше потери
, тем меньше потери  . На практике длительность пуска определяется требованиями технологического процесса.
. На практике длительность пуска определяется требованиями технологического процесса.
Литература: 1, с. 449-452; 4, с. 78.
СРС: Определить потери при пуске трехскоростного АД.
Литература: 1, с. 449-452; 4, с. 78.
Контрольные вопросы:
1. Чему равны потери при пуске двухскоростного АД в одну ступень?
2. Чему равны потери при пуске двухскоростного АД в две ступени?
3. Определите потери при плавном пуске двигателя.
4. Как уменьшить потери при плавном пуске двигателя?
5. Чем ограничивается длительность пуска?
ЛЕКЦИЯ 5
Энергосбережение в ЭМС
Энергосбережение - это деятельность, связанная с эффективным использованием энергии в разнообразных сферах жизнедеятельности человека.
Вопрос энергосбережения исключительно важен для нашей страны, что связанно как с недостаточной обеспеченностью ее собственными энергоресурсами, так и с экологическими проблемами.
Энергосбережение на промышленных предприятиях требует повышения эффективности работы технологических установок и механизмов. У отдельных електроприемников единичная мощность может достигает нескольких тысяч киловатт, а годовое потреблении электроэнергии десятки и даже сотни миллионов киловатт-часов.
Электропривод является звеном, которое связывает систему электроснабжения с технологическими установками, обеспечивая преобразование электрической энергии в механическую, согласно алгоритму работы технологической установки.
Сфера применения электрического привода в промышленности, на транспорте и в быту постоянно расширяется. На данное время свыше 60 % всей произведенной в мире электрической энергии потребляется электрическими двигателями. В некоторых областях промышленности потребления электроэнергии электроприводом достигает 80% . На один жителя Земли приходится больше чем 10 электрических двигателей. Таким образом, эффективность энергосберегающих технологий в значительной мере определяется эффективностью электропривода.
Анализ потерь энергии при различных условиях работы позволяет выявить пути экономии электроэнергии в ЭМС.
Возможные пути энергосбережения в ЭМС отображены на рис. 1.16

Рис. 1.16
Необходимость изучения технологического режима рабочей машины является основой для возможного комплекса мероприятий, которые обеспечивают эффективность энергосбережения средствами ЭП.
Выбор рационального типа электропривода для конкретной технологической установки и переход от нерегулированного электропривода к регулируемому предполагает выполнение таких операций:
- анализ технологического процесса, условий эксплуатации и разработка технических требований к электроприводу;
- технико-экономическое сравнение вариантов систем регулируемого электроприводов и выбор рационального типа электропривода;
- расчет системы электропривода: расчет мощности и разработка системы управления.
Применение регулируемого электропривода позволяет усовершенствовать технологические процессы, повысить автоматизацию производства, оптимизировать режимы работы механизмов и снизить потребление электроэнергии.
Перехода от нерегулируемых ЭП к регулируемым в ряде технологий позволит сэкономить до 25-30% электроэнергии. В таких технологиях, как водоснабжение, воздухоснабжение, переход к регулируемому ЭП позволяет сэкономить до 25% воды, 10% тепла, 50% электроэнергии.
При рассмотрении возможностей энергосбережения в электроприводе следует учитывать, что основную его часть составляют простые, по обыкновению нерегулируемые массовые устройства, такие, как например, вентиляторы, насосы, конвейеры, механизмы в перерабатывающей промышленности, строительстве. Именно эти объекты являются основными потребителями электроэнергии и именно здесь возможна реальная ее экономия.
Относительно простейшего неуправляемого массового электропривода энергосбережение заключается в усовершенствовании процедуры выбора мощности двигателя конкретной технологической установки с целью соблюдения номинального теплового режима двигателя.
Двигатель заниженной мощности быстро выходит из строя, а двигатель завышенной мощности преобразует энергию неэффективно, т.е. с высокими удельными потерями в самом двигателе (низкий КПД) и в сети питания (низкий cos φ). Поскольку простейших электроприводов миллионы, то ошибки выбора двигателя приводят к значительному ущербу.
Повышение экономичности массового нерегулируемого электропривода заключается в переходе промышленности на энергосберегающие двигатели. В энергосберегающих двигателях за счет увеличения массы активных материалов (железа и меди) повышены номинальные значения КПД и cos  . Энергосберегающие двигатели дают эффект при постоянной нагрузке. Целесообразность применения энергосберегающих двигателей должна оцениваться с учетом дополнительных затрат, поскольку небольшое (до 5 %) повышение номинальных КПД и cos φ достигается за счет увеличения массы железа на 30-35 %, меди на 20-25 %, алюминия на 10-15 % и в целом двигателя на 25-30 % относительно обычных двигателей.
. Энергосберегающие двигатели дают эффект при постоянной нагрузке. Целесообразность применения энергосберегающих двигателей должна оцениваться с учетом дополнительных затрат, поскольку небольшое (до 5 %) повышение номинальных КПД и cos φ достигается за счет увеличения массы железа на 30-35 %, меди на 20-25 %, алюминия на 10-15 % и в целом двигателя на 25-30 % относительно обычных двигателей.
В приводах переменного тока следует предусмотреть мероприятия по повышению коэффициента мощности: применение статических компенсирующих устройств, работу СД с опережающим cos .
В регулируемом электроприводе повысить энергоэффективность возможно при отказе от реостатных способов регулирования скорости, применении в силовом канале транзисторных силовых преобразователей, использовании фильтрокомпенсируюших устройств (для подавления высших гармоник преобразователей).
В переходных режимах уменьшения потерь можно получить за счет снижения момента инерции электропривода. Для этого используются специальные двигатели с удлиненным ротором. Существенно уменьшить момент инерции можно за счет замены одного двигатели двумя, половинной мощности. Для уменьшения потерь энергии при пуске необходимо использовать многоскоростные двигатели или режим плавного пуска.
Тенденции направления энергосбережения состоят также в изменении методик проектирования типов двигателей, расширение их номенклатуры.
Прогнозируется рост частоты питания двигателей в регулированном электроприводе до 500—1 000 Гц и снижение индуктивностей обмоток.
Наблюдается рост выпуска электроприводов с синхронными двигателями с возбуждением от постоянных магнитов (так называемый бесконтактный вентильный двигатель (ВД) постоянного тока). Эти двигатели имеют наилучшие массогабаритные показатели.
Перспективными являются также синхронно-реактивные двигатели, которые имеют массогабаритные показатели, которые лежат в промежутке между соответствующими значениями синхронного и асинхронного двигателей, а по энергетической эффективности, возможно, превосходят их, причем при низшей стоимости.
Энергетический менеджмент.
Одним из эффективных механизмов энергосбережения есть энергетический менеджмент. До сих пор в энергетическом менеджменте управление рациональным использованием энергии не распространялось на конкретного технологического потребителя, а рассматривалось в целом предприятие или технологическая линия.
Однако в последнее время энергетический менеджмент начал распространяться на конечного потребителя. При этом вводится беспрерывный контроль за потреблением энергии и соответственно оперативное реагирование на ухудшение его энергоэффективности.
При проектировании технологического процесса во время выбора электропривода ранее не обращали внимание на его экономичность на протяжении всего срока жизни, а за основу брали соответствие его условиям технологического процесса. На современном этапе развития энергетического менеджмента рассматривается не просто оценка загрузки привода, и не только его стандартные характеристики и энергоэффективность на данный момент времени, а делаться оценка его экономичности за весь срок службы.
В связи с этим особое значения приобретает создание систем, которые обеспечивали бы контроль сферы экономичной работы путем сравнения "идеального" режима функционирования системы с действующим режимом в реальном времени (рис.1.17).
Рис. 1.17 - Сравнение "идеального" режима функционирования системы
с действующим режимом в реальном времени
В результате многих факторов, в частности таких, как работа привода с недогрузкой, недостаточное техническое обслуживание, нерациональное управление технологическим процессом, различных случайных факторов, реальное потребление энергии всегда будет отличным от теоретически идеального. Таким образом, контроль и оценивания указанных расхождений между фактическим и идеальным потреблением энергии и является предметом систем энергетического контроля. Собственно контроль, конечно, не сэкономит энергию, но с его помощью можно определить, где и когда следует принять меры для устранения неэффективного использования энергии.
В эксплуатации, в основном, приходится иметь дело с режимами работы привода, не нормированными стандартами. Наиболее характерным является режим с быстроизменяемой нагрузкой, когда двигатель периодически входит в режим перегрузки, возвращаясь потом на номинальный, или в режим работы с нагрузкой, меньшей номинальной.
Выбор оценки электропотребления электропривода обусловлен функциональным назначением и условиями его работы в технологическом процессе. В связи с этим целесообразно выделить две группы электроприводов.
К первой группе относятся электроприводы, для которых основным являются статические режимы работы с постоянной или медленно изменяющейся нагрузкой. Ко второй группе - электроприводы, которые работают главным образом в динамических режимах, которые связаны с отработкой быстроизменяемых управляющих действий и возмущений. Указанные факторы определяют отличие в методах решения задач контроля энергоэффективности привода.
Физический процесс электропотребления является непрерывной функцией времени. Для измерения и дальнейшей обработки данных об эффективности электропотребления с помощью цифровых технических средств необходимо превратить исследуемый процесс в дискретную форму.
Для разработки методов и средств контроля и анализа энергоэффективности электропривода необходимо решить следующие задачи:
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|