- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Теорія електропривода: Підручник / М. Г. Попович, М. Г. Борисюк, В. А. Гаврилюк та ін.; За ред. М. Г. Поповича. – К.: Вища шк., 1993. – 494 с. 1 страница
Министерство образования и науки, молодежи и спорта Украины
Национальный технический университет Украины
«Киевский политехнический институт»
“ТЕОРИЯ ЭЛЕКТРОПРИВОДА-2”
конспект лекций кредитного модуля для студентов дневной формы обучения направлению подготовки 6.050702-"Электромеханика" специальности "Электромеханические системы автоматизации и электропривод"
Киев НТУУ “КПИ” 2011
Министерство образования и науки, молодежи и спорта Украины
Национальный технический университет Украины
«Киевский политехнический институт»
“ТЕОРИЯ ЭЛЕКТРОПРИВОДА-2”
конспект лекций кредитного модуля для студентов дневной формы обучения направлению подготовки 6.050702-"Электромеханика" специальности "Электромеханические системы автоматизации и электропривод"
Утверждено Методическим советом НТУУ "КПІ"
Киев НТУУ “КПІ” 2011
“Теория электропривода-2” конспект лекций кредитного модуля для студентов дневной формы обучения направлению подготовки 6.050702-"Электромеханика" специальности "Электромеханические системы автоматизации и электропривод"/ Сост.С.П.Колесниченко. - К.: НТУУ ”КПИ”, 2011.- 99с.
Гриф предоставлено Методическим советом НТУУ "КПИ"
(Протокол № от 2012 г.)
Составитель Колесниченко Сергей Петрович , к.т.н., ст. викл.
Ответственный редактор Киселичник О.И., канд. техн. наук, доц.
Рецензенты: Кондратенко Игорь Петрович, д.т.н., заведующий отделом
Михальський Валерий Михайлович, д.т.н., вед.н.с.
ЛЕКЦИЯ 1
РАЗДЕЛ 1. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА И ОСНОВЫ ВЫБОРА ДВИГАТЕЛЕЙ ПО МОЩНОСТИ
Тема 1.1. Энергетические режимы и характеристики электропривода
Вопросы энергетики электроприводов содержат в себе анализ превращения энергии в электромеханической системе. Они позволяют определить энергетическую эффективность электропривода, провести оценку теплового состояния электродвигателя , определить возможные потери энергии в различных режимах работы электропривода и наметить пути их снижения, рационально выбрать мощность электродвигателя и т. д.
Условно вопросы энергетики электропривода можно разделить на две группы:
1 группа: анализ интегральных показателей – потерь энергии и потребляемой мощности за определенное время, обычно за цикл работы электропривода;
2 группа: определение пиковых значений токов, моментов, потерь потребляемой мощности.
Энергетические соотношения в электроприводе анализируют как в статических, так и в динамических режимах.
1.1.1. Баланс мощностей в электромеханической системе с однодвигательным электроприводом.
Баланс мощностей устанавливает соотношение между мощностью, которая потребляется из электрической сети, передается рабочему органу (полезная мощность) и расходуется в электроприводе.
Рассмотрим баланс мощностей в одномассовом электроприводе:
 (1.1)
(1.1)
где  – мощность электроэнергии, которая поступает из сети на вход электропривода. Ее направление считают положительным, если энергия поступает из сети в систему электропривода, и отрицательным, если направление энергии обратное;
– мощность электроэнергии, которая поступает из сети на вход электропривода. Ее направление считают положительным, если энергия поступает из сети в систему электропривода, и отрицательным, если направление энергии обратное;
 – полезная мощность на валу электродвигателя, передаваемая рабочему органу;
– полезная мощность на валу электродвигателя, передаваемая рабочему органу;
 – мощность, обусловленная кинетической энергией, которая запасается во вращающихся элементах электропривода;
– мощность, обусловленная кинетической энергией, которая запасается во вращающихся элементах электропривода;
 – мощность, обусловленная потенциальной энергией, запасаемой в участках механических передач, которые деформируются;
– мощность, обусловленная потенциальной энергией, запасаемой в участках механических передач, которые деформируются;
 – мощность, обусловленная потенциальная энергией, запасаемой в элементах
– мощность, обусловленная потенциальная энергией, запасаемой в элементах  системы, которые перемещаются линейно на высоту
системы, которые перемещаются линейно на высоту  ;
;
 – мощность, которая запасается в индуктивных сопротивлениях обмоток электродвигателя;
– мощность, которая запасается в индуктивных сопротивлениях обмоток электродвигателя;
 – мощность, которая запасается в емкостных сопротивлениях обмоток электродвигателя;
– мощность, которая запасается в емкостных сопротивлениях обмоток электродвигателя;
 – мощность суммарных потерь в электромеханической системе.
– мощность суммарных потерь в электромеханической системе.
В общем случае каждая из составляющих уравнения (1.1) может быть положительной или отрицательной, что определяет направление передачи энергии к соответствующему элементу.
Уравнение (1.1) дает возможность определить значительное количество сочетаний потоков мощности и их направлений, а соответственно и энергетических режимов работы электропривода.
Для различных режимов работы электроприводов возможен ряд типичных диаграмм направления энергетических потоков мощности.
1.1.2 Основные энергетические режимы электропривода.
Рассмотрим направления потоков мощности при условии отсутствия изменения потенциальной энергии деформации и потенциальной энергии элементов в электромеханической системе (ЭМС), а также при отсутствии изменения энергии в индуктивных и емкостных элементах электрической части ЭМС.
При этих условиях уравнение баланса мощностей (1.1) примет вид:
 (1.2)
(1.2)
При движении в установившемся режиме с постоянной скоростью  , следовательно в (1.2) мощность
, следовательно в (1.2) мощность  = 0 .
= 0 .
Уравнения баланса мощностей и направления потоков мощности для основных режимов работы ЭМС имеют вид:
1) Двигательный режим (Рис. 1.1). Баланс мощностей: 

Рис. 1.1
Энергия, потребляемая из сети поступает на вал двигателя и расходуется на потери в двигателе.
2) Рекуперативное торможение (Рис. 3.2). 

Рис. 1.2
Энергия, поступающая с вала двигателя отдается в сеть и расходуется на потери в двигателе.
 3) Электродинамическое торможение (Рис. 1.3):
3) Электродинамическое торможение (Рис. 1.3): 
Рис. 1.3
Энергия, поступающая с вала двигателя расходуется на потери в двигателе и тормозном сопротивлении.
4) Торможение противовключением (Рис. 1.4): 
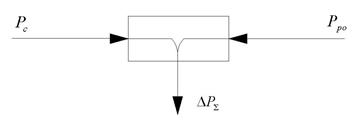
Рис. 1.4
Энергия, потребляемая из сети и поступающая с вала двигателя расходуется на потери в двигателе и тормозном сопротивлении.
При изменении скорости  и мощность дополнительно запасается или отдается вращающимися элементами электропривода.
и мощность дополнительно запасается или отдается вращающимися элементами электропривода.
5) Режим увеличения скорости  (Рис. 1.5). Баланс мощностей:
(Рис. 1.5). Баланс мощностей:

Рис. 1.5
6) Режим уменьшения скорости  (Рис. 1.6). Баланс мощностей:
(Рис. 1.6). Баланс мощностей: 

Рис. 1.6
1.1.2 Основные энергетические характеристики электропривода
1) Цикловой КПД электропривода.
При работе электропривода происходит преобразование энергии. В двигательном режиме из электрической в механическую, в генераторном (тормозном) – наоборот. Преобразование энергии всегда сопровождается потерями. Экономичность преобразования энергии в любом известном цикле движения характеризует цикловой КПД электропривода -  . Он представляет собой отношение полезной мощности за цикл -
. Он представляет собой отношение полезной мощности за цикл -  к потребленной за этот же время энергии от сети или источника -
к потребленной за этот же время энергии от сети или источника -  .
.
 ;
;
 ;
;
Таким образом, цикловой КПД:
 (1.3)
(1.3)
При определении циклового КПД, началу и концу цикла должна соответствовать одна и та же запасенная энергия в электромеханической системе. В целом же, величина КПД зависит как от момента, так и от скорости, поэтому основной характеристикой электропривода является номинальное значение КПД.
Если на определенных участках работы мощность потребляемой энергии и механическая мощность были постоянные, то (1.3) можно записать:
 (1.4)
(1.4)
При переменных значениях мощностей  и
и  сотношение (1.4) характеризует мгновенный КПД.
сотношение (1.4) характеризует мгновенный КПД.
Если на определенных участках цикла энергия передается от рабочего органа в сеть, то в этом случае цикловой КПД отображает экономичность обратного преобразования энергии (из механической в электрическую):

Поскольку ЕМС состоит из силового электрического преобразователя, электромеханического преобразователя (двигателя) и механической части, которые характеризуются своими потерями, а значит и своим КПД, общий КПД всей ЕМС:
 (1.5)
(1.5)
где  – КПД силового электрического преобразователя;
– КПД силового электрического преобразователя;
 – мощность на выходе силового электрического преобразователя;
– мощность на выходе силового электрического преобразователя;
 – КПД электромеханического преобразователя (двигателя);
– КПД электромеханического преобразователя (двигателя);
 – мощность на выходном валу двигателя;
– мощность на выходном валу двигателя;
 – КПД механической части.
– КПД механической части.
Однако каждая из составляющих общего η - величина не постоянная, а зависит прежде всего от нагрузки устройства, скорости рабочих органов и других факторов. Для номинального режима работы устройства значения  определяется по паспортным характеристикам.
определяется по паспортным характеристикам.
Таким образом, цикловой КПД является мерой экономичности преобразования энергии электроприводом, мерой полезного использования потребляемой из сети энергии. Универсальной формулой для его определения является формула (1.3).
2) Энергетическая эффективность электропривода как приемника (потребителя) энергии от электрической сети.
Кроме экономичности преобразования энергии электроприводом, важное значение имеет анализ экономичности потребления энергии от сети. В процессе создания механической мощности в электродвигателях часть энергии теряется на пути от источника питания к электроприводу. Наиболее существенны эти потери в системах, которые питаются от сети переменного тока. Большая часть промышленных устройств потребляют из электрической сети полную мощность  , т.е. по сети протекает как активная мощность Р так и реактивная мощность Q индуктивного характера.
, т.е. по сети протекает как активная мощность Р так и реактивная мощность Q индуктивного характера.
Потери мощности  в активных сопротивлениях
в активных сопротивлениях  источника энергии, питающей линии и приемника определяются полным током I, протекающим в сети. Их можно разложить на составляющие, а именно:
источника энергии, питающей линии и приемника определяются полным током I, протекающим в сети. Их можно разложить на составляющие, а именно:

где DPа - потери активной мощности за счет передачи по сети активной мощности Р;
DPp - дополнительные потери активной мощности за счет передачи по сети реактивной мощности Q, пропорциональные ее квадрату.
Составляющая реактивного тока в полном токе увеличивает потери энергии в элементах системы питания и в электроприводе. Поэтому экономичность потребления активной мощности на переменном токе определяется  , являющимся энергетической характеристикой электропривода,.
, являющимся энергетической характеристикой электропривода,.
Еще менее экономно передается энергия, если при регулировании искажается форма синусоидального тока (при импульсном питании или использовании силовых тиристорных преобразователей). Активная мощность при периодических несинусоидальных токах равняется сумме активных мощностей всех гармоник:
 (1.6)
(1.6)
Отношение активной мощности к полной характеризуется коэффициентом мощности:
 . (1.7)
. (1.7)
При отсутствии высших гармоник он совпадает с . В противном случае:
 , (1.8)
, (1.8)
где  – фазовый сдвиг между первыми гармониками напряжения и тока;
– фазовый сдвиг между первыми гармониками напряжения и тока;
 – коэффициент нелинейности, представляющий собой отношение действующего значения первой (основной) гармоники тока
– коэффициент нелинейности, представляющий собой отношение действующего значения первой (основной) гармоники тока  к действующему значению несинусоидального периодического тока.
к действующему значению несинусоидального периодического тока.

Литература: 1, с. 438-440; 2, с. 338-339.
СРС: Потери мощности при несинусоидальной форме напряжения.
Литература: 1, с. 438-440; 2, с. 338-339.
Контрольные вопросы:
1. Назовите составляющие баланса мощностей.
2. Что определяет цикловой КПД?
3. Приведите типичные диаграммы энергетических потоков.
4. Как оценить эффективность потребления энергии.
5. Как определяется коэффициент мощности?
ЛЕКЦИЯ 2
Потери энергии в электроприводе
1. Потери энергии в установившихся режимах электропривода
Анализ потерь энергии в двигателях дает возможность оценить тепловые режимы электродвигателя, обеспечить рациональный выбор двигателя по нагреву.
Мощность потерь в двигателе удобно представить в виде постоянных и переменных потерь:
 (1.9)
(1.9)
где  – постоянные потери, не зависящие от нагрузки, они содержат в себе потери в стали -
– постоянные потери, не зависящие от нагрузки, они содержат в себе потери в стали -  , механические потери -
, механические потери -  и для двигателей постоянного тока с независимым возбуждением и синхронного – потери в обмотке возбуждения -
и для двигателей постоянного тока с независимым возбуждением и синхронного – потери в обмотке возбуждения -  ;
;
 – переменные потери, которые зависят от нагрузки, их называют потерями в меди, они пропорциональны квадрату тока и сопротивлению обмотки.
– переменные потери, которые зависят от нагрузки, их называют потерями в меди, они пропорциональны квадрату тока и сопротивлению обмотки.
Для ДПТ переменные потери: 
Для АД переменные потери: 
Для СД переменные потери: 
Номинальные переменные потери (при работе двигателя в номинальном режиме на естественной характеристике) можно определить по паспортным данным двигателя. Поэтому переменные потери при любой нагрузке удобно выразить через номинальные потери и относительные коэффициенты.
Определим кратность тока при любой нагрузке:
для ДПТ:  ; для АД:
; для АД:  ; для СД:
; для СД: 
Выражение для переменных потерь при любой нагрузке:
 (1.10)
(1.10)
Отношение постоянных потерь к номинальным переменным выражается коэффициентом постоянных потерь:
 (1.11)
(1.11)
Коэффициент  зависит от мощности электродвигателя, его скорости, и от исполнения электродвигателя. Обычно
зависит от мощности электродвигателя, его скорости, и от исполнения электродвигателя. Обычно  .
.
С учетом относительных коэффициентов, суммарные потери при любой нагрузке:
 (1.12)
(1.12)
Выражение потерь в двигателе через механические координаты.
Для ДПТ с независимым возбуждением величина потерь, выраженная через механические величины – момент и перепад скоростей двигателя имеет вид:
 , (1.13) где
, (1.13) где  – мощность, потребляемая из сети;
– мощность, потребляемая из сети;  – электромагнитная мощность.
– электромагнитная мощность.
Для определения потерь через относительный перепад скоростей домножим и разделим (1.13) на  :
:
 (1.14)
(1.14)
2. Потери энергии в регулируемом электроприводе
С точки зрения энергетики, регулирование скорости при  , означает изменение мощности механической энергии на валу двигателя. Регулирование скорости может осуществляться:
, означает изменение мощности механической энергии на валу двигателя. Регулирование скорости может осуществляться:
1) за счет отвода энергии, которая рассеивается в виде тепла (реостатная схема управления);
2) передачи высвобожденной энергии в сеть (каскадные схемы);
3) потребление из сети количества энергии, необходимого в каждый момент времени (питание от управляемых силовых преобразователей).
В регулируемом электроприводе постоянные потери изменяются пропорционально квадрату скорости:
 (1.15)
(1.15)
где  – потери на возбуждение при регулировании тока возбуждения.
– потери на возбуждение при регулировании тока возбуждения.
Для регулируемого электропривода суммарные потери в установившемся режиме движения:
 (1.16)
(1.16)
В регулируемом электроприводе суммарные потери зависят как от величины постоянных и переменных потерь, так и от установившейся скорости.
3. Потери энергии в переходных режимах электропривода
В переходных режимах токи двигателя существенно превышают номинальные значения, что вызывает увеличение переменных потерь . Для ряда электроприводов динамический режим является основным. Суммарные потери энергии за время переходного процесса:
 (1.17)
(1.17)
Поскольку токи двигателя в переходных режимах существенно выше номинальных, то часть потерь энергии, которая обусловлена постоянными потерями незначительна и ею можно принебречь, считая:
Выражая переменные потери через механические координаты электропривода получим потери энергии в переходных процессах:
 (1.18)
(1.18)
где  – скорость идеального холостого хода (при
– скорость идеального холостого хода (при  ) механической характеристики по которой перемещается рабочая точка во время переходного процесса.
) механической характеристики по которой перемещается рабочая точка во время переходного процесса.
4. Анализ потерь энергии в типовых переходных режимах работы электропривода
Анализ потерь в переходных процессах осуществляется по формуле (1.18):
,
в которую следует подставить выражение для момента двигателя из основного уравнения движения электропривода и соответствующее значение скорости .
Определим величину потерь энергии в типовых переходных режимах работы электропривода.
1.Потери при пуске электродвигателя на холостом ходу без нагрузки( ).
Электродвигатель рассматривается как одномассовая система. При пуске двигателя скорость изменяется от  до
до  , как показано на рис. 1.7
, как показано на рис. 1.7

Рис. 1.7
Из основного уравнения движения электропривода для одномассовой системы:
при , выразим момент двигателя:
 ;
;
Подставим выражение для момента в выражение для потерь энергии в переходных процессах (1.18):

 , поскольку характеристика по которой происходит разгон проходит через точку
, поскольку характеристика по которой происходит разгон проходит через точку  при
при  .
.

Таким образом, потери при пуске на холостом ходу без нагрузки численно равны запасу кинетической энергии движущихся частей, электродвигателя.
2. Потери при пуске электродвигателя под нагрузкой (  ).
).
При пуске двигателя под нагрузкой скорость изменяется от до  , как показано на рис. 1.8:
, как показано на рис. 1.8:

Рис. 1.8 Пуск двигателя под нагрузкой
Из основного уравнения движения электропривода:
выразим момент двигателя:
Подставляя его в выражение для потерь энергии в переходных процессах (1.18), получим:

При пуске под нагрузкой потери увеличились. Для определения потерь, обусловленных нагрузкой, необходимо иметь аналитическое выражение кривой переходного процесса  , или получить эту зависимость экспериментально.
, или получить эту зависимость экспериментально.
3. Потери при электродинамическом торможении без нагрузки( ).
При электродинамическом торможении двигателя скорость изменяется от  до
до  , как показано на рис. 1.9:
, как показано на рис. 1.9:

Рис. 1.9
Из основного уравнения движения электропривода:
выразим момент двигателя:

Подставляя его в выражение для потерь энергии в переходных процессах (1.18), получим:

 , т.к. характеристика динамического торможения проходит через ноль, при .
, т.к. характеристика динамического торможения проходит через ноль, при .
Потери при электродинамическом торможении равны кинетической энергии, накопленной во вращающихся частях электромеханической системы.
4. Потери при электродинамическом торможении при наличии нагрузки ( ).
При электродинамическом торможении двигателя под нагрузкой скорость изменяется от  до , как показано на рис. 1.10:
до , как показано на рис. 1.10:
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|