- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Лабораторна робота № 4. Дослідження цифрової системи з типовими законами управління. Мета роботи. Вихідні дані. Порядок виконання роботи. Методичні поради
Лабораторна робота № 4
Дослідження цифрової системи з типовими законами управління
Мета роботи
Поглиблення знань студентів при вивченні питань корекції цифрових автоматичних систем.
У результаті виконання роботи студенти повинні:
– уміти скласти математичну модель цифрової системи автоматичного управління для реалізації її на ЕОМ;
– виконати дослідження впливу цифрового Р,РІ та PID - регулятора на роботу системи.
Вихідні дані
Вихідними даними для виконання роботи є:
– структурна схема досліджуваної системи (рис. 4.1);
– параметри неперервної частини системи та цифрового регулятора (табл. 4.1);
– таблиця z-перетворень для передаточних функцій.
Порядок виконання роботи
При виконанні лабораторної роботи радимо додержуватися такого порядку:
– записати z-передаточну функцію зведеної неперервної частини цифрової системи;
– скласти структурну схему цифрової системи та записати різницеві рівняння для моделювання на ЕОМ перехідних процесів при Р,РІ та PID - законах управління. При цьому, для Р-закону коефіцієнт підсилення Кр прийняти спочатку рівним заданому, а потім збільшити його вдвічі;
– для всіх розглянутих випадків за даними графіків перехідного процесу, а також аналітичне визначити усталені похибки в досліджуваних системах. Визначити також величину перерегулювання та тривалість перехідного процесу;
– проаналізувати результати виконаної роботи та зробити висновки про вплив типових законів управління на якість роботи системи.
Методичні поради
Універсальним способом покращення якості роботи цифрових автоматичних систем є спосіб послідовної корекції з цифровим регулятором. Найбільш широке використання на практиці мають типові закони управління (Р, PI, PID), які реалізуються в цифровій формі за допомогою мікро-ЕОМ або мікроконтролера.
У даній лабораторній роботі студентам пропонується дослідити вплив типових законів управління на роботу цифрової системи. Висновки про результати виконаного дослідження пропонуємо зробити студентам самостійно.
Для моделювання перехідних процесів радимо скористатися стандартними макетами Mathcad або Matlab.
 |
Приклад 4.1 Задана структурна схема цифрової САУ з типовими законами управління (рис. 4.2). Визначимо перехідні процеси в системі при використані типових законів управління (Р, РІ та PID). Розрахунок виконаємо за допомогою ЕОМ (пакет Matlab).
Таблиця 4.1
Параметри досліджуваних систем до лабораторної роботи №4
| № з/п | Схема на рис 4.1 | Т | К | Т1, с | Т2, с | Т3, с | КР | К1, с | Kd | Тd, с |
| а | 0,1 | 0,5 | - | 1,5 | 0,2 | |||||
| б | 0,07 | 1,5 | 0,8 | 0,9 | 0,71 | 1,3 | 0,4 | |||
| а | 0,25 | - | 0,75 | 1,5 | 0,8 | |||||
| б | 0,1 | 0,3 | 1,6 | 0,7 | ||||||
| б | 0,05 | 0,5 | 0,9 | 1,5 | 0,4 | 1,4 | 0,25 | |||
| а | 0,2 | 1,2 | - | 0,4 | ||||||
| а | 0,1 | 1,5 | 1,5 | - | 2,5 | 0,4 | ||||
| б | 0,07 | 2,2 | 0,6 | 1,2 | 1,8 | 0,45 | 1,6 | 0,35 | ||
| а | 0,1 | 0,5 | - | 0,75 | 0,6 | 0,2 | ||||
| б | 0,08 | 2,7 | 0,8 | 1,4 | 0,35 | 0,3 | ||||
| б | 0,09 | 1,8 | 0,9 | 2,2 | 0,2 | 2,1 | 0,42 | |||
| а | 0,1 | - | 0,5 | 0,2 | ||||||
| б | 0,12 | 0,9 | 1,1 | 1,7 | 0,25 | 1,8 | 0,3 | 0,12 | ||
| а | 0,15 | 2,5 | 1,5 | - | 0,4 | |||||
| а | 0,1 | _ | 1,5 | 0,5 | 0,2 | |||||
| б | 0,12 | 0,2 | 2,35 | 0,35 | ||||||
| а | 0,1 | 2,2 | - | 0,25 | 0,4 | |||||
| б | 0,2 | 3,6 | 1,2 | 2,3 | 3,4 | 0,1 | 2,6 | 0,45 |
 |
Результати розрахунку наводимо далі. При цьому графіки перехідних процесів показанні у одній системі координат, відповідно для Р, РІ та PID-законів (криві 1, 2, 3). Пропонуємо читачеві самостійно зробити висновки при використані різних типових законів.
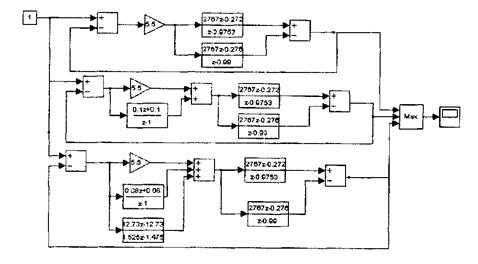
Рис. 4.3. Дослідження цифрової САУ з типовими законами управління на ЕОМ (до прикладу 4.1)
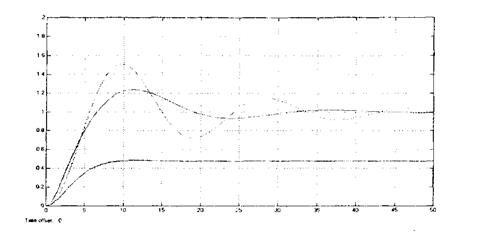
Рис. 4.4. Результати дослідження САУ на ЕОМ (до прикладу 4.1)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|