- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
А.Г. Староверов 5 страница
Бесконтактные устройства, как и контактные аппараты, обладают дискретным действием, т. е. характеризуются двумя состояниями, соответствующими понятиям «включено» и «выключено». Под состоянием «включено» у бесконтактных устройств понимается состояние, когда на их выходе имеются сигналы с требуемыми параметрами (напряжением или током). Отсутствие напряжения и тока на выходе соответствует состоянию «выключено».
Наиболее распространены в схемах управления логические элементы, на основе которых строится логическая часть системы управления, где в зависимости от входных сигналов появляются соответствующие выходные. Выходные сигналы через усилители поступают на исполнительные устройства.
Бесконтактные схемы могут быть собраны с помощью логических элементов, выполняющих элементарные логические функции И, ИЛИ, НЕ, ПАМЯТЬ, ПОВТОРИТЕЛЬ, ВРЕМЯ или ЗАДЕРЖКА. Бесконтактные логические элементы системы управления выполняют определенный объем смысловых логических операций, но соединять или разрывать какие-либо схемы они не могут. Поэтому применение бесконтактных устройств путем прямой замены контактных аппаратов невозможно.
По сравнению с релейно-контактными схемами число бесконтактных элементов в бесконтактных схемах в несколько раз больше, чем реле.
Бесконтактные элементы классифицируют по виду выполняемой функции. Сложные функции раскладываются в ряд простых, реализуемых с помощью простых элементов, которые осуществляют элементарные функции. Название некоторых элементарных логических функций и элементов, их функции, обозначения, формулы и релейные эквиваленты приведены в табл. 1.
В устройствах автоматики, телемеханики, в системах контроля, сигнализации, измерений и защиты находят широкое применение логические элементы: матричные серии «Логика-М», интегральные серии «Логика-И» и транзисторные серии «Логика-Т». Каждая серия унифицированной системы «Логика» состоит из нескольких типов элементов, выполняющих различные логические и вспомогательные функции. Например, серия «Логика-И» содержит семь логических элементов, при помощи которых можно реализовать различные логические функции.
Логические элементы серии «Логика-Т» изготовляют в виде модулей: транзисторы, диоды, резисторы и другие детали монтируют на гетинаксовых печатных платах, которые размещают затем в пластмассовом корпусе размером 90×19,5×55 мм и заливают компаундом на основе эпоксидной смолы.
Серия «Логика-И» состоит из четырех групп элементов: логических, функциональных, времени и выходных (усилителей). Всего имеется 30 различных элементов. Напряжение питания всех элементов 15 В. Габаритные размеры 70×70×24 мм.
Изображение схем управления с бесконтактными элементами отличается от изображения схем с контактными аппаратами. Электромеханические реле и контакторы обычно имеют одну входную цепь и несколько выходных цепей в виде замыкающих и размыкающих контактов. Бесконтактные элементы имеют несколько входных цепей и только одну или две выходных цепи. Поэтому в релейно-контактных схемах нельзя механически заменить контакты бесконтактными элементами.
Таблица 1
Наименование н обозначение логических функций н элементов
| Наименование логической функции (элемента) | Содержание логической функции | Обозначение элемента | Релейный эквивалент |
| И (конъюнктор) | Сигнал на выходе появляется только при наличии всех сигналов на входе | 
| 
|
| ИЛИ (дизъюнктор) | Сигнал на выходе появляется тогда, когда имеется сигнал хотя бы на одном из входов | 
| 
|
| НЕ (инвертор, отрицание) | При наличии сигнала на входе сигнал на выходе отсутствует, и наоборот | 
| 
|
| ПАМЯТЬ (двоичный прибор) | При подаче сигнала на вход, т. е. включения X1, выходной сигнал Y сохраняется до подачи сигнала на вход Х2 (отключение памяти) независимо от последующего состояния входа X1 | 
| 
|
| ПОВТОРЕНИЕ (повторитель) | Сигнал на выходе появляется при наличии сигнала на входе | 
| 
|
| ЗАДЕРЖКА (выдержка времени) | Сигнал на выходе появляется через некоторое время после подачи сигнала на вход и исчезает одновременно с входным сигналом | 
| 
|
| И—НЕ (элемент Шеффера) | Сигнал на выходе отсутствует тогда, когда имеются сигналы на всех входах | 
| 
|
| ЗАПРЕТ | При отсутствии сигнала на входе ЗАПРЕТ X1 сигнал на выходе появляется одновременно с сигналом на входе Х2, а при наличии сигнала на входе X1, сигнал на выходе отсутствует | 
| 
|
В качестве примера рассмотрим две схемы управления нереверсивным электродвигателем: релейно-контактную (рис. 34, а) и схему, выполненную на бесконтактных элементах (рис. 34, б). При работе по схеме, показанной на рис. 34, а, включение контактора осуществляется кнопкой SВ1 «Пуск», при нажатии на которую замыкаются ее разомкнутый контакт и цепь питания катушки пускателя КМ. Пускатель КМ главными (силовыми) контактами КМ2 (рис. 34, в) подключает двигатель М к сети. При этом ротор двигателя начнет вращаться. С помощью блокировочного контакта КМ1 напряжение на катушке удерживается и после того, как кнопка SВ1 отпущена (ее контакт разомкнется). Для остановки двигателя напряжение с катушки контактора должно быть снято. Это может быть достигнуто нажатием на кнопку SВ2 «Стоп» (размыканием ее контактов) либо размыканием контактов теплового реле КК (последнее срабатывает при длительной перегрузке двигателя).

Рис. 34. Схемы управления нереверсивным электроприводом:
а – релейно-контактная; 6 – на бесконтактных элементах; в – силовая схема;
1 элемент И–НЕ; 2 – элемент ПАМЯТЬ; 3 – выходной элемент (усилитель)
При управлении пускателем КМ с использованием логических элементов (рис. 34, б) в исходном состоянии схемы пускатель отключен. При нажатии на кнопку SВ1 возникает сигнал на входе элемента 2. Появившийся сигнал на его выходе поступает на вход элемента 3, к выходу которого подключена катушка пускателя КМ. Под действием выходного напряжения в катушке начинает протекать ток, достаточный для срабатывания пускателя. При отпускании кнопки SВ1 схема остается в работе, гак как элемент 2 «запомнил» входную команду. Снятие выходного сигнала у элемента 2 осуществляется нажатием на кнопку SВ2 или разрывом контакта КК теплового реле. При разрыве хотя бы одной из входных цепей элемента 1 на его выходе появляется сигнал, поступающий на вход Х2, с помощью которого триггер (элемент 2) перебрасывается, и сигнал на его выходе исчезает, что приводит к обесточиванию катушки пускателя. Двигатель М отключается от сети.
Схемы с тиристорами применяют в системах автоматики для бесконтактной коммутации цепей переменного тока (бесконтактные пускатели, ключи и переключатели); для преобразования постоянного тока в переменный (инверторы и преобразователи частоты); для получения различных режимов работы электроприводов.
5. ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА
К группе вспомогательных устройств относятся: предохранители и автоматические выключатели, резисторы, конденсат торы, аппаратура сигнализации.
Предохранители и автоматические выключатели предназначены главным образом для защиты электрических цепей от аварийных режимов работы оборудования (короткие замыкания, перегрузки и понижение напряжения) и защиты людей от поражения электрическим током.
Предохранители служат для защиты схем автоматики и электрического оборудования низкого напряжения от недопустимых длительных перегрузок и токов короткого замыкания.
Предохранители в основном состоят из корпуса контактного устройства и плавкой вставки. Они являются одними из простейших защитных устройств. Основной элемент предохранителя – плавкая вставка, выполненная в виде тонкой проволоки или пластины, которую изготовляют из легкоплавких металлов (медь, серебро, свинец) или сплавов на их основе. Включенная последовательно в цепь защищенного объекта плавкая вставка допускает длительное протекание номинального тока. При токе выше номинального вставка нагревается до температуры плавления и, расплавляясь, разрывает цепь.
Все предохранители характеризуются двумя показателями: селективностью защиты и защитной характеристикой.
Селективность защиты – это свойство реагировать на повреждение электрической установки ближайшего к месту повреждения устройства предохранителя, т. е. при защите электрической установки предохранителями плавкая вставка ближайшего к месту повреждения предохранителя должна перегореть раньше, чем плавкая вставка последующего по направлению питания предохранителя.
Защитной характеристикой предохранителя называется характеристика, определяющая зависимость полного времени отключения (время расплавления плавкой вставки плюс время горения дуги) от отключаемого тока.
Автоматические выключатели (автоматы) снабжены расцепителями, которые срабатывают при возникновении аварийных режимов и механически воздействуют на удерживающий элемент аппарата. При срабатывании они освобождают его подвижную систему.
По принципу действия расцепители автоматов подразделяют на тепловые, электромагнитные и полупроводниковые. Тепловые расцепители обычно выполняются на основе биметаллических элементов, а электромагнитные на основе реле тока.
Различают следующие виды наиболее распространенных автоматов: универсальные, установочные, быстродействующие (ВАБ), гашения магнитного поля (АГП), защиты от утечек на землю.
Универсальные и установочные автоматы изготовляют на значительные токи и имеют комбинированные системы защиты – максимального тока и минимального напряжения. Вторые отличаются от первых лишь наличием изоляционного кожуха, благодаря чему их можно устанавливать в общедоступных помещениях: Универсальные и установочные автоматы работают главным образом в установках низкого напряжения.
Быстродействующие автоматы (ВАБ) постоянного тока устанавливают на преобразовательных установках. Они обладают способностью ограничивать ток короткого замыкания за счет быстрого образования дуги между контактами и интенсивного роста ее сопротивления. Их применяют в силовой аппаратуре.
Аппараты гашения магнитного поля (АГП) предназначены для снятия поля возбуждения крупных синхронных машин при возникновении в них короткого замыкания.
Автоматы защиты от утечек на землю служат для защиты людей и животных от поражения электрическим током, а также для защиты от коротких замыканий и перегрузок в сетях с глухо-заземленной нейтралью.
Резисторы – это электрические элементы, предназначенные главным образом для ограничения или регулирования тока либо напряжения в электрической цепи.
Резисторы классифицируют по назначению, номинальной мощности, номинальному активному сопротивлению, конструкции.
Существует большое разнообразие конструктивного исполнения резисторов. Резисторы бывают литые, штампованные, витые проволочные и ленточные, переменные и постоянные.
Резисторы изготовляют также из неметаллических материалов. Так, например, резисторы серии ВС представляют собой керамический стержень или трубку, на поверхность которой нанесен тонкий слой углерода. Снаружи резистор защищен лаковым или эмалевым покрытием. Контактные выводы выполнены из медной проволоки или тонкой латунной ленты.
Конденсаторы – это элементы, предназначенные для накопления электричества. Конденсатор состоит из нескольких металлических пластин, отделенных друг от друга изолятором. К основным параметрам, характеризующим конденсаторы, относятся: номинальное значение емкости; допускаемые отклонения от номинального значения; рабочее напряжение; сопротивление изоляции или ток утечки.
Промышленность выпускает конденсаторы очень большого диапазона емкостей (от долей пикофарад до нескольких тысяч микрофарад).
Рабочее напряжение показывает значение напряжения, приложенного к конденсатору (до 100 кВ), при котором последний нормально работает длительное время.
Сопротивление изоляции характеризует значение тока утечки при заданном значении подводимого напряжения.
В зависимости от материала диэлектрика конденсаторы делят на бумажные, металлобумажные, слюдяные, керамические, стеклокерамические и стеклоэмалевые, пленочные, электролитические и оксидополупроводниковые.
По назначению все конденсаторы подразделяют на две группы: силовые и обычные.
Силовые конденсаторы применяют в силовых сетях высокого и низкого напряжений, обычные конденсаторы – в схемах электроники. Силовые конденсаторы в отличие от обычных имеют значительные объем и массу, большие емкость, реактивную мощность и запасенную энергию.
Аппаратура сигнализации предназначена для оповещения обслуживающего персонала о состоянии отдельных элементов или параметров технологических процессов, проходящих в них. Сигнализацию подразделяют на звуковую (сирены, гудки и звонки), световую (сигнальные лампы и табло) и визуальную.
Аппараты звуковой сигнализации отличаются простотой конструкции и надежностью. Их применяют для привлечения внимания обслуживающего персонала к изменениям, происходящим в контролируемых системах, и вызова персонала к определенному месту. Для получения звуковых сигналов, отличающихся от производственных шумов, используют звонки громкого боя типа М3 или сигнальные сирены типа СС.
Световая сигнализация с помощью ламп является простым и надежным средством оповещения. Возможности светового табло значительно шире. На стекле табло может быть нанесена надпись, которая четко выделяется при включении табло. Таким образом, передаются целые команды. Конструктивно табло отличается от обычной сигнальной аппаратуры внешним оформлением.
Сигнальные лампы закрывают стеклянными колпачками (линзами) различных цветов. В соответствии с цветом линзы сигнал может иметь то или иное значение. Например, зеленый свет – нормальное состояние, желтый свет – предупреждающий сигнал, красный свет – аварийное состояние, белый свет – различные производственные сигналы.
Визуальная сигнализация осуществляется с помощью различных устройств. Например, используется флажковое сигнальное реле типа ЭС. Его применяют для сигнализации о работе схем защиты и автоматики в цепях постоянного тока. Это сигнальное устройство содержит четыре бесконтактных устройства, действующих независимо друг от друга. При срабатывании любого устройства выпадает соответствующий флажок
Контрольные вопросы и задания
1. Что такое реле?
2. Расскажите о классификации электрических реле.
3. Какими параметрами характеризуются электрические реле?
4. Расскажите о функциях электрнческих реле.
5. Как можно изменять выдержку времени реле?
6. Изложите принцип действия контактных аппаратов ручного управления.
7. Каковы назначения и принцип действия шагового искателя?
8. Каковы назначения и принцип действия командоаппарата?
9. Каковы назначения контакторов и пускателей?
10. Назовите основные типы бесконтактных устройств управления и дайте им характеристики.
11. В чем заключается особенность схем управления на бесконтактных устройствах?
12. Каковы назначение и принципы действия предохранителей и автоматических выключателей?
13. Назовите основные типы резисторов и дайте нм характеристики.
14. С какой целью применяются в схемах конденсаторы?
15. Каково назначение и принципы действия аппаратуры сигнализации?
Лабораторная работа 2.Измерение параметров электромагнитных реле
Содержание работы. Изучить устройство, принцип действия и технические характеристики электромагнитных реле. Ознакомиться со способами изменения выдержки времени различных реле. Определить параметры срабатывания и отпускания. Установить минимально и максимально возможные выдержки реле времени.
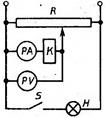
Рис. 35. Схема исследования электромагнитных реле
Описание лабораторной установки. Лабораторная установка представляет собой стенд с закрепленными на нем набором различных электромагнитных реле, электросекундомером, миллиамперметром и вольтметром.
Порядок выполнения работы. 1. Собрать схему, изображенную на рис. 35. 2. Изменяя потенциометром R напряжение на обмотке реле К, определить ток и напряжение его срабатывания в момент загорания лампы Н. 3. Уменьшая потенциометром R напряжение на реле, определить силу тока и напряжение отпускания реле в момент погасания лампы Н. 4. Измерения повторить 3 раза и по результатам вычислить среднее значение параметров. 5. Измерить выдержки времени посредством электросекундомера, включенного в схему совместно с реле так, чтобы выполнялось условие одновременной остановки секундомера после замыкания и размыкания контактов реле.
Содержание отчета. Отчет должен содержать схемы испытаний реле, краткое описание лабораторной установки, принцип действия реле и способы регулирования выдержки времени, результаты испытаний и технические характеристики реле и приборов.
ГЛАВА 5. ЗАДАЮЩИЕ И ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
1. КЛАССИФИКАЦИЯ ЗАДАЮЩИХ И ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
Задающие устройства предназначены для задания требуемого значения регулируемого (управляемого) параметра. По виду вырабатываемых сигналов задающие устройства подразделяют на два основных класса: аналоговые и цифровые. Аналоговые в свою очередь делят на непрерывные и дискретные, при этом дискретность может осуществляться как во времени, так и по значению вырабатываемого сигнала. Цифровые задающие устройства формируют только сигналы дискретных уровней.
Существенным признаком классификации является род энергии вырабатываемых сигналов. В соответствии с этим признаком различают задающие устройства с электрическими, пневматическими, гидравлическими и механическими (в виде перемещений и усилий) сигналами. Для своей работы задающие устройства потребляют энергию от внешнего источника, вид которой может не совпадать с видом энергии сигнала. Так, например, в регуляторах прямого действия задающие устройства обычно вырабатывают механические сигналы, а для своей работы потребляют электрическую энергию.
Одним из важнейших признаков задающих устройств является вид носителя программы. В задающих устройствах непрерывного действия наиболее часто для этих целей используют кулачковые и рычажные механизмы, функциональные потенциометры и бумажную диаграмму. В задающих устройствах дискретного действия находят применение многоцепные переключатели, перфокарты и перфоленты, магнитная пленка и кинопленка.
Исполнительное устройство является промежуточным преобразователем, состоящим из двух самостоятельных узлов: исполнительного механизма и регулирующего (управляющего) органа.
Исполнительные механизмы предназначены для воздействия через регулирующий орган или непосредственно на объект управления. В исполнительный механизм входят двигатель и передаточное устройство. Основными параметрами, характеризующими работу исполнительных механизмов, являются усилие на выходе механизма, коэффициент усиления по мощности, линейное или угловое перемещение, частота вращения, быстродействие и т. п.
В зависимости от управляющего воздействия на выходе различают два вида исполнительных механизмов: силовые и параметрические.
Если исполнительные механизмы создают управляющее воздействие на регулирующий орган в виде силы или момента, то такие механизмы называют силовыми. К этой группе относятся электромагниты, электромеханические муфты, различного вида двигатели. Если изменение состояния регулирующего органа связано с изменением его параметров (сопротивления, магнитного потока, температуры, скорости и т. п.) или параметров подводимой энергии (напряжения, тока, частоты и фазы электрического тока, давления рабочей среды и т. п.), то те же исполнительные механизмы называют параметрическими. Например, в автоматическом термостате исполнительным механизмом является усилитель, нагрузкой которого служит нагревательный элемент (регулирующий орган) термостата. При отклонениях температуры от заданного значения изменяется входное напряжение усилителя, при этом изменится и выходное напряжение, а также ток в нагревательном элементе и температура в термостате. В этом устройстве усилитель совмещает функции элемента усиления и исполнительного механизма.
В зависимости от вида потребляемой энергии различают электрические, гидравлические, пневматические и механические исполнительные механизмы. Наибольшее распространение в системах автоматики получили электрические механизмы.
В зависимости от характера движения выходного вала исполнительные механизмы делят на три вида: с линейным, поворотным (угол поворота меньше 360°) и вращательным (угол поворота больше 360°) движением.
Регулирующим органом называется устройство (блок исполнительного устройства), которое изменяет расход энергии или вещества и непосредственно влияет на регулируемую величину объекта регулирования. Так, например, с помощью регулирующих органов можно изменять количество хладоносителя, подаваемого в теплообменник холодильной машины, или устанавливать напряжение и силу электрического тока на нагревательных элементах термической печи.
По принципу регулирующего воздействия на объект различают дросселирующие и дозирующие регулирующие органы. Первые представляют собой переменное гидравлическое сопротивление. За счёт изменения проходного сечения дросселирующего устройства регулируется расход вещества. Ко вторым относятся устройства или механизмы, которые регулируют поступление вещества или энергии путем изменения своей производительности.
Наиболее широкое распространение получили дросселирующие регулирующие органы, хотя дозирующие более экономичны.
2. ЗАДАЮЩИЕ УСТРОЙСТВА
Большинство задающих устройств состоит из трех основных элементов: привода, носителя программы и элемента настройки. В зависимости от конструктивного оформления устройства отдельные элементы могут быть функционально совмещены.
Наиболее распространенными приводами задающих устройств непрерывного действия являются синхронные электрические двигатели и часовые механизмы. В качестве носителей программы в задающих устройствах непрерывного действия обычно используют механические устройства, рычажные механизмы и функциональные потенциометры.
Механическими носителями программы в задающих устройствах непрерывного действия являются кулачковые механизмы различной конструкции. Назначение кулачковых механизмов состоит в преобразовании вращательного движения кулачка или прямолинейного движения кулачковой линейки в качательное или прямолинейное движение щупа толкателя. С точки зрения обеспечения постоянного контакта кулачка со щупом кулачковые механизмы делят на устройства с силовым замыканием, т. е. открытые (рис. 36, а и г), и устройства с кинематическим замыканием (с канавкой), которые называются закрытыми (рис. 36, б и в).
Кулачки с силовым замыканием проще в изготовлении и обеспечивают большую точность. Закрытые кулачки целесообразно применять при малой мощности привода, так как из-за отсутствия натяжения пружины уменьшается момент сопротивления. Применение закрытых кулачков целесообразно также при больших перемещениях щупов. Выбор между плоскими и цилиндрическими кулачками определяется только конструктивными соображениями, связанными с общей компоновкой задающего устройства.

Рис. 36. Типы кулачков:
а – плоский открытый; б – плоский закрытый; в – цилиндрический закрытый; цилиндрический открытый
Кроме кулачковых механизмов, в качестве механических носителей заданной функции применяют рычажные механизмы, отношение плеч которых используется, например, для установления заданного соотношения расходов в струйном гидравлическом регуляторе.
В электрических программных и следящих регуляторах носители программ, как правило, выполняют в виде функциональных потенциометров.
По способу реализации заданной функции потенциометры подразделяют на профильные, ступенчатые (частный случай профильных), с некруглым винтовым каркасом, с переменным шагом намотки, с секциями, выполненными из провода различного сечения, с дополнительными постоянными резисторами, шунтирующие обмотку, имеющую отводы (рис. 37, а–е).
В зависимости от угла поворота движка потенциометры разделяются на три вида: с углом вращения движка менее 360°; с углом вращения движка более 360°; с неограниченным углом вращения движка.
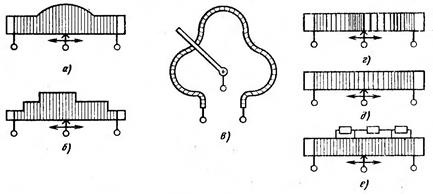
Рис. 37. Функциональные потенциометры:
а – профильный; б – ступенчатый; в – с иекруглым каркасом; г – с переменным шагом намотки;
д – с секциями, выполненными из провода различного сечения; е – с шунтирующими резисторами
Сечение каркаса может быть круглым или плоским (с большим отношением высоты к толщине).
В задающих устройствах по соображениям простоты изготовления, возможности получения необходимой точности и взаимозаменяемости наибольшее распространение получили профильные потенциометры с плоскими каркасами и посекционно шунтированные потенциометры с отводами обмотки, выполненной на круглых каркасах.
Погрешность воспроизведения сложных функций для рассмотренных профильных и ступенчатых потенциометров достигает ±2 %.
Всем рассмотренным задающим устройствам непрерывного действия присущи общие недостатки: невозможность изменения программы без выключения регулятора; ограниченное быстродействие; точность задания программы определяется как точностью изготовления деталей, так и точностью их сборки. Перечисленные недостатки отсутствуют у задающих устройств дискретного действия, поэтому они получают в настоящее время все большее распространение.
В качестве привода сменных носителей программ в дискретных задающих устройствах применяют шаговые двигатели различных видов.
Все носители программ дискретных задающих устройств могут быть условно разделены на две категории: сменные и постоянные. К первой категории относятся перфокарты, перфоленты, ленты с нанесенными оптическими метками (использующие как неравномерную прозрачность, так и неравномерную отражательную способность), магнитные ленты и диски (однако два последних носителя при смене не заменяются; стирание старой программы и запись новой равноценны замене). Вторую категорию составляют «схемные» носители программы, представляющие собой многоцепные переключатели, элементы которых связаны между собой в соответствии с заданным алгоритмом функционирования.
Перфокарты изготовляют из плотной бумаги, а перфоленты – из такой же бумаги или лавсана. На перфокарте или перфоленте пробиваются отверстия, совокупность которых составляет код программы. Если цикл программы повторяется, то перфолента может быть свернута в кольцо. Для считывания сигналов с перфокарты или перфоленты используют контактные щетки или фотоэлементы.
Оптические носители (кинолента, бумажная или лавсановая лента) выполняют аналогичные функции, что и перфолента, но считывание с них осуществляется только с помощью различных фотоэлементов. Разрешающая способность оптических носителей в основном определяемая качеством оптической системы, достигает 5–10 знаков на 1 мм длины.
Магнитные носители программы, широко используемые в цифровых ЭВМ, находят неограниченное применение в дискретных задающих устройствах промышленных станков с числовым программным управлением, где они заняли преобладающее место.
В качестве постоянных носителей программы находят широкое применение многоцепные переключатели различного вида, в качестве которых используют шаговые искатели, многоцепные реле времени, переключающие бесконтактные устройства и др.
3. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Электрические исполнительные механизмы в зависимости от типа принципа действия делят на электромагнитные и электродвигательные.
Электромагнитные исполнительные механизмы являются наиболее простыми, надежными и быстродействующими из электрических исполнительных механизмов. Их используют для управления различного рода регулирующими и затворными клапанами, вентилями, золотниками и т. п. По виду движения исполнительного (регулирующего) органа (шток, выходной вал) электромагнитные механизмы подразделяют на электромагниты с прямолинейным движением и электромагнитные муфты с вращательным движением.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|