- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
А.Г. Староверов 2 страница
К числу основных признаков, позволяющих классифицировать первичные преобразователи, относятся принцип действия и вид входного и выходного сигналов (рис. 3).
В зависимости от принципа действия первичные преобразователи можно разделить на две группы: параметрические и генераторные.
Параметрические преобразователи преобразуют контролируемую величину в один из параметров электрической цепи: проводимость (сопротивление), индуктивность, емкость. Следовательно, для их работы необходимо подводить от внешнего источника электрическую энергию. К параметрическим относят следующие типы преобразователей: потенциометрические, индуктивные, емкостные, тензометрические и др.

Рис. 3. Классификация первичных преобразователей
В генераторных преобразователях непосредственно преобразуется неэлектрическая энергия входного сигнала в электрическую энергию, значение которой пропорционально значению контролируемого параметра. К генераторным относятся термоэлектрические (термопары), фотоэлектрические, пьезоэлектрические и тахометрические преобразователи. Они работают автономно, т. е. не нуждаются в подводе внешней электроэнергии.
По виду входного сигнала первичные преобразователи делятся на следующие группы: температуры, давления, разрежения, расхода, уровня, состава и влажности веществ, плотности, перемещения, скорости, ускорения и т. д.
По виду выходного сигнала первичные преобразователи подразделяют на несколько групп. Одна группа преобразует контролируемую величину в изменение активного сопротивления, другая – в изменение емкости, третья – в изменение индуктивности и т. д.
Любой первичный преобразователь состоит из отдельных частей. Основной частью является чувствительный элемент, а средства защиты и крепления его относятся к вспомогательным элементам.
В 1960 г. в Советском Союзе начали разрабатывать и внедрять новую систему приборов, названную «Государственной системой приборов (ГСП)». Основными принципами этой системы являются применение унифицированных сигналов и модульное построение преобразователей, приборов и регуляторов. В соответствии с требованиями ГСП первичные преобразователи, применяемые для автоматизации технологических процессов на промышленных предприятиях, должны выдавать стандартные сигналы. Так, например, первичные преобразователи, выходным сигналом которых является напряжение или сила электрического тока, должны отвечать рядам напряжения: 0,1; 0,2; 0,5; 1; 5; 10; 20 В и силе тока: 1; 2; 5; 10; 20 мА. Такая унификация необходима при использовании преобразователей в автоматизированных системах управления технологическим процессом (АСУ ТП) с управляющими цифровыми ЭВМ. В этой главе будет описана конструкция и показана область применения потенциометрических, индуктивных, электромагнитных, емкостных, тензометрических и фотоэлектрических преобразователей, имеющих наибольшее распространение в системах автоматики. Другие типы первичных преобразователей (температуры, давления, расхода, количества, уровня, состава и влажности газа, влажности сыпучих материалов и плотности жидкости) будут рассмотрены в разделе II.
2. ПОТЕНЦИОМЕТРИЧЕСКИЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
Потенциометрический преобразователь преобразует перемещение чувствительного элемента (подвижного контакта) в постоянный или переменный ток вследствие изменения своего электрического сопротивления. Различают преобразователи с угловым (рис. 4, а) и линейным (рис. 4, б) перемещением подвижного контакта. Потенциометрический преобразователь состоит из реохорда 2 и подвижного контакта 1. При различных положениях подвижного контакта сопротивление между ним и точкой В изменяется, что вызывает изменение напряжения U0, подаваемого от источника питания на клеммы измерительного прибора.
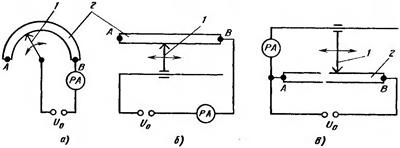
Рис. 4. Потенциометрические преобразователи:
а – с угловым перемещением контакта; б – с линейным перемещением контакта; в – включенный по схеме делителя напряжения
Реохорд датчика представляет собой каркас из изоляционного материала с намотанным на него в один ряд проводом. Для намотки используют проволоку без изоляции из константана, нихрома, фехраля и других сплавов с высоким омическим сопротивлением. По поверхности намотки скользит подвижный контакт.
В зависимости от конструкции реохорда различают два типа потенциометрических преобразователей: линейные и функциональные.
Линейные потенциометрические преобразователи имеют постоянные сечения каркаса, диаметр проволоки и шаг намотки.
Напряжение питания и длина намотки являются постоянными величинами, поэтому выходные напряжения прямо пропорциональны значению перемещения подвижного контакта.
Функциональные потенциометрические преобразователи обладают нелинейной характеристикой, что обеспечивается намоткой проволоки на каркасы с переменным сечением. Такой преобразователь представляет собой как бы несколько включенных последовательно линейных преобразователей. Нелинейность характеристики может быть достигнута также путем шунтирования резисторами отдельных участков намотки линейных потенциометрических преобразователей. Если у линейного потенциометрического преобразователя сделать отвод от середины обмотки, то он будет характеризовать наряду со значением перемещения движка и его направление.
Потенциометрические преобразователи могут включаться по схеме реостата (рис. 4, а и б) или потенциометра (рис. 4, в) (делителя напряжения). В зависимости от схемы включения перемещение подвижного контакта преобразуется в изменение тока (при последовательном соединении) или напряжения (при включении по схеме делителя). Первая схема применяется довольно редко, так как она не обеспечивает достаточной точности преобразования, на величину которой оказывают влияние сопротивление соединительных проводов и переходного сопротивления между контактом и обмоткой реохорда.
Потенциометрические преобразователи выполняют с 20%‑ной или 100%‑ной зоной пропорциональности. Последние получили большее распространение, так как они охватывают всю шкалу измерительного прибора.
К недостаткам потенциометрических преобразователей можно отнести наличие подвижного контакта и трудности получения линейной характеристики. Однако простота конструкции и возможность отказа от усилителя компенсируют отмеченные недостатки. Потенциометрические преобразователи получили широкое распространение в схемах автоматики для преобразования механических перемещений. В литейном производстве они могут быть использованы для определения высоты встряхивания на встряхивающих формовочных машинах.
3. ИНДУКТИВНЫЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
Индуктивные преобразователи применяют для преобразования малых линейных или угловых перемещений в электрические сигналы. Принцип их действия основан на зависимости индуктивного сопротивления катушки от изменения зазора в магнитопроводе, от перемещения магнитопровода в катушке или от изменения площади зазора.
Индуктивный преобразователь с подвижным якорем (изменяющимся зазором) представляет собой катушку индуктивности 3 с магнитопроводом 2 и подвижным якорем 1 (рис. 5, а). Катушка индуктивности с магнитопроводом, называемая статором, закрепляется неподвижно, а якорь механически соединяется с подвижной частью объекта управления, перемещение которого необходимо преобразовать в электрический сигнал. Перемещение якоря изменяет воздушный зазор 6 (входная величина преобразователя), вызывает изменение индуктивного сопротивления катушки и, как следствие этого, выходной величины тока I при постоянном напряжении и0.
Чувствительность индуктивных преобразователей с изменяющимся воздушным зазором уменьшается с увеличением зазора 6, поэтому их используют для измерения и контроля очень малых перемещений (до 2 мм). В таком диапазоне рабочих перемещений их чувствительность не превышает 2 мкм.
Индуктивные преобразователи с перемещающимся магнитопроводом (рис. 5, б) способны измерять большие перемещения (до 50 мм).
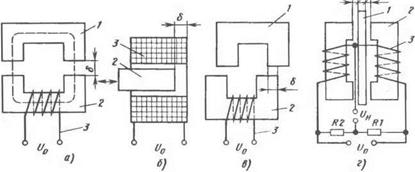
Рис. 5. Индуктивные преобразователи:
а – с подвижным якорем; б – с перемещающимся сердечником;
в – с изменяющейся площадью зазора; г – дифференциальный
У индуктивных преобразователей с изменяющейся площадью воздушного зазора (рис. 5, в) статическая характеристика линейна только на определенном участке. Линейность нарушается, когда активное сопротивление становится сравнимым с индуктивным. Диапазоны перемещения якоря больше (до 8 мм), чем у преобразователей с изменяющимся воздушным зазором, однако чувствительность ниже.
Все перечисленные выше виды индуктивных преобразователей обладают высокой надежностью, имеют практически неограниченный срок службы и большую мощность выходного сигнала (до нескольких ватт). К недостаткам можно отнести нереверсивность статической характеристики, небольшой диапазон перемещения якоря, наличие тока холостого хода и влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки практически полностью отсутствуют у дифференциальных индуктивных преобразователей.
Дифференциальный индуктивный преобразователь (рис. 5, г) имеет два статора 2 с катушками индуктивности 3 и один подвижный якорь 1. При отклонении якоря от среднего положения происходит изменение индуктивного сопротивления обеих катушек и на выходе преобразователя появляется напряжение Uн. Катушки индуктивности включаются либо в дифференциальную измерительную схему, либо как смежные плечи мостовой измерительной схемы.
Дифференциальные индуктивные преобразователи по сравнению с ранее рассмотренными конструкциями обладают более высокими точностью и чувствительностью. Их статическая характеристика линейна и реверсивная. Поэтому они получили наибольшее распространение.
Трансформаторные преобразователи являются разновидностью индуктивных. Они представляют собой трансформаторы с переменным коэффициентом трансформации за счет изменения коэффициента взаимоиндуктивности между обмотками. Трансформаторные преобразователи применяют для преобразования небольших линейных и угловых перемещений в электрический сигнал (напряжение переменного тока).
Первичная обмотка 2 (рис. 6) дифференциального трансформаторного преобразователя с угловым перемещением якоря намотана на центральном стержне 1 магнитопровода, а две совершенно одинаковые вторичные обмотки 3 располагаются на крайних стержнях. Они соединены последовательно и имеют встречную намотку. При симметричном положении якоря 4 по отношению к стержню 1 во вторичных обмотках будут индуцироваться одинаковые по значению и противоположные по фазе ЭДС, а напряжение на выходе преобразователя будет равно нулю. При повороте якоря, механически связанного с подвижной частью объекта управления, изменяется значение магнитных потоков и в соответствии с этим значение ЭДС, т. е. на выходе появляется напряжение, амплитуда которого равна разности амплитуд ЭДС вторичных обмоток. Статическая характеристика рассмотренного преобразователя линейна и реверсивна. Реверсивность означает изменение в знаке выходного сигнала при изменении знака входного сигнала. Чувствительность преобразователя в 2 раза выше чувствительности обычных индуктивных преобразователей.
Интересна конструкция ферродинамического преобразователя, предназначенного для преобразования угловых перемещений в электрические сигналы.
Ферродинамический преобразователь (рис. 7) имеет магнитопровод, состоящий из плунжера /, шихтованного ярма 2 и сердечника 3. На сердечнике 3 укреплены агатовые подпятники (на схеме не показаны), в которых на кернах установлена поворотная рамка 4, механически соединенная с подвижной частью объекта управления. Концы обмотки подвижной рамки подсоединяются с помощью спиральных пружин и проводов. Принцип работы преобразователя заключается в следующем. При подаче переменного тока на обмотку возбуждения 5 в магнитопроводе возникает магнитный поток. Если рамка 4 расположена по нейтрали ММ, то значение наведенной ЭДС равно нулю. При повороте рамки на некоторый угол α в ней индуцируется ЭДС, величина которой пропорциональна углу поворота. Рабочий угол рамки от нейтрали составляет 40°. В зависимости от типа преобразователя напряжение на выходе рамки изменяется от –1 до +1 В или от 0 до 2 В.
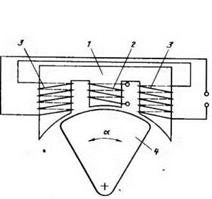 Рис. 6. Дифференциальный трансформаторный преобразовательзователь
Рис. 6. Дифференциальный трансформаторный преобразовательзователь
| 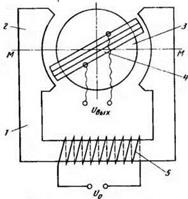 Рис. 7 Ферродинамический преобра
Рис. 7 Ферродинамический преобра
|
Высокочастотные индуктивные преобразователи позволяют измерить толщину фольги металлов, толщину гальванических покрытий, разностенность металлических труб и т. д. Принцип их действия основан на изменении индуктивности обмотки при возникновении вихревых токов в проводящем теле, расположенном вблизи этой обмотки.
В таких преобразователях используется так называемый поверхностный эффект, т. е. затухание вихревых токов по мере проникновения их в глубь проводящей среды, обусловленных переменным магнитным полем; при этом разность токов возбуждающего поля и поля вихревых токов уменьшается.
4. ЕМКОСТНЫЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
Емкостные преобразователи преобразуют неэлектрические величины (перемещение, уровень жидкости, влажность, усилие и т. д.) в изменение электрической емкости. Емкостной преобразователь является частью регулирующего или измерительного устройства с чувствительным элементом, выполненного в виде конденсатора и реагирующего на изменение измеряемого параметра технологического процесса. Чувствительный элемент емкостного преобразователя представляет собой плоский или цилиндрический конденсатор, у которого при воздействии измеряемого параметра изменяется расстояние между пластинами, площадь пластин или диэлектрическая проницаемость среды между обкладками. Емкость конденсатора С возрастает с увеличением активной площади F и диэлектрической проницаемости ξ (для воды ξ = 81; для воздуха ξ = 1; для формовочной смеси ξ = 1 ... 4) и уменьшается с увеличением расстояния между пластинами X, т. е. С = ξ0ξF/Х, где ξ0 – диэлектрическая проницаемость вакуума, ф/м. Учитывая влияние перечисленных факторов на размеры чувствительного элемента, различают три типа емкостных преобразователей: с переменным расстоянием между пластинами, с изменяемой площадью пластин и изменяемой диэлектрической проницаемостью среды. Перечисленные параметры емкостных преобразователей являются входными величинами, а выходной величиной будет емкость конденсатора.

Рис. 8. Емкостные преобразователи:
а – с переменным расстоянием между пластинами; б – с изменяемой площадью цилиндрический;
в – с изменяемой площадью плоский; г – с изменением диэлектрической постоянной; δ – перемещение;
α – угол поворота пластин; h – высота уровня жидкости; H – высота пластин датчика
Емкостные преобразователи с переменным расстоянием между пластинами (рис. 8, а) как правило конструктивно выполняют в виде плоского конденсатора, состоящего из двух или более пластин, одна из которых закреплена, а другая механически связана с подвижной частью объекта управления. Емкостные преобразователи этого типа применяют для измерения толщины изделий, а также используют для измерения давления, усилия или вибрации.
Емкостные преобразователи с изменяемой площадью пластин выполняют как цилиндрическими (рис. 8, б), так и плоскими (рис. 8, в).
Цилиндрический емкостной преобразователь (рис. 8, б) представляет собой два цилиндра разного диаметра, помещаемые один в другой. Емкость конденсатора зависит от осевого перемещения d внутреннего цилиндра. Преобразователи этого типа предназначаются для измерения линейных перемещений.
В плоском преобразователе (рис. 8, в) емкость зависит от изменения активной площади пластин при повороте одной пластины относительно другой. Такие преобразователи используют при измерении угловых перемещений.
Емкостные преобразователи с изменением диэлектрической проницаемости среды между пластинами применяют для регулирования влажности формовочной смеси и дозирования воды при ее приготовлении. При колебании уровня жидкости изменяется емкость конденсатора (рис. 8), электродами которого служат корпус 1 и металлический стержень 2. Емкость такого преобразователя складывается из емкости цилиндрического конденсатора без жидкости и параллельно включенной емкости цилиндрического конденсатора с жидкостью. Емкость и чувствительность такого преобразователя увеличиваются с уменьшением отношения диаметров электродов, а также с ростом высоты цилиндра.
Емкостные преобразователи просты по устройству, обладают достаточно высокой чувствительностью, малыми размерами и массой. Однако они имеют три недостатка: мощность выходного сигнала мала, поэтому необходимо применять усилитель; при промышленной частоте электрического тока практически невозможно получить достаточную мощность, в этой связи они получают питание от источника высокой частоты (10 кГц и более); сильное влияние оказывают паразитические емкости и посторонние электрические поля, поэтому требуется тщательное экранирование как самих датчиков, так и соединительных проводов.
В литейных цехах емкостные преобразователи находят применение для контроля уровня формовочной смеси в расходных бункерах при ее автоматической раздаче, для дозирования воды при приготовлении формовочной смеси в бегунах и т. д.
5. ТЕНЗОМЕТРИЧЕСКИЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
Работа тензометрического преобразователя (тензорезистора) основана на изменении электрического сопротивления проводников при упругих деформациях растяжения или сжатия. Они применяются для преобразования деформаций, усилий и напряжений в электрический сигнал. В зависимости от конструкции и материала чувствительного элемента тензорезисторы подразделяются на проволочные, фольговые, полупроводниковые и тензолитовые.
Простейшим проволочным тензорезистором может служить отрезок тонкой проволоки. При деформации детали одновременно будет деформироваться и наклеенная проволока. Изменение электросопротивления DR проволоки при ее растяжении или сжатии связано с относительной деформацией е соотношением
 ,
,
где R – номинальное сопротивление проволоки, Ом; k – коэффициент чувствительности.
Коэффициент чувствительности k зависит от вида материала и технологии изготовления преобразователя; его значение определяют экспериментально. Наибольшее распространение получили константан и нихром, для которых k = 1,9–2,1.
Размеры детали часто не позволяют закрепить на ней преобразователь в виде прямолинейного отрезка проволоки большой длины. Поэтому промышленность изготовляет тензометрические преобразователи в виде спирали (решетки) из нескольких петель проволоки (рис. 9, а). Проволоку 1 наклеивают на подложку 2 из тонкой бумаги или лаковой пленки и сверху наклеивают такую же тонкую бумагу. К проволоке приваривают (или припаивают) выводы 3, выполненные из тонких полосок медной фольги. Недостатком данной конструкции решетки является чувствительность преобразователя к поперечным деформациям. Для устранения этого недостатка петли между рядами заменяют медными перемычками 4 (рис. 9, б). Основными параметрами решетки являются: длина l (3 ... 75 мм), ширина а (0,03 ... 10 мм) и радиус закругления r (0,1 ... 0,3 мм).
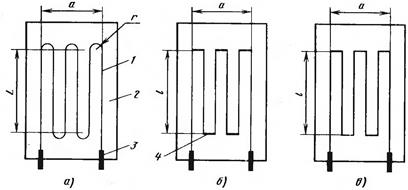
Рис. 9. Тензометрические преобразователи:
а – проволочные; б – с медными перемычками; в – фольговые
Проволочные тензорезисторы просты по конструкции, имеют малую массу и невысокую стоимость. Их статическая характеристика линейна и реверсивна. К недостаткам проволочных тензорезисторов относятся низкая чувствительность и одноразовость действия. Они подвержены влиянию окружающей среды (температура и влага).
Фольговые тензорезисторы по принципу действия и основным параметрам сходны с проволочными преобразователями и отличаются только конструкцией решетки (рис. 9, в) и способом ее получения. Для фольговых тензорезисторов применяется фольга толщиной 4 ... 12 мкм из константана, нихрома, титан-алюминиевого или золото-серебряного сплавов. Решетку фольговых тензодатчиков получают методом фотолитографии, который позволяет изготовлять преобразователи любой конструкции (линейные, розеточные, мембранные и т. и.) с высокой повторяемостью параметров. Фольговые тензорезисторы по сравнению с проволочными имеют ряд преимуществ. Они более чувствительны и точны за счет лучшей передачи деформаиии от детали к фольге, имеют хороший механический контакт с контролируемой деталью и позволяют пропускать через фольгу большой ток.
В настоящее время начинают находить применение полупроводниковые тензопреобразователи, изготовленные из полупроводниковых материалов – кремния, германия, мышьяка, галия и др.
В отличие от проволочных и фольговых преобразователей изменение сопротивления при деформации у полупроводниковых происходит благодаря изменению удельного сопротивления.
Основным преимуществом полупроводниковых преобразователей является высокая чувствительность (почти в 100 раз выше, чем у проволочных). Они имеют большой выходной сигнал, что позволяет в некоторых случаях отказаться от применения усилителя. Однако у них большой разброс параметров и низкая механическая прочность, т. е. они хрупки.
Тензометрические преобразователи находят применение в машинах литья под давлением для определения давления металла в камере прессования, а также при контроле качества термической обработки.
6. ФОТОЭЛЕКТРИЧЕСКИЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
Принцип действия фотоэлектрических преобразователей (фотоэлементов) основан на использовании фотоэлектрического эффекта, т. е. они реагируют на изменение светового потока. Создание фотоэлектрических преобразователей оказалось возможным, когда были открыты материалы, электроны которых получают дополнительную энергию при воздействии световой энергии. Причем значение дополнительной энергии может быть таково, что часть электронов оказывается свободной.
В зависимости от поведения электронов, высвобождающихся под действием светового потока, различают три группы фотоэлементов: с внешним и внутренним фотоэффектом и с запирающим слоем (вентильные).
Фотоэлемент с внешним фотоэффектом (рис. 10, а) представляет собой вакуумную двухэлектродную лампу. Катод 1 образован светочувствительным слоем (цезий или сплав сурьмы с цезием) и нанесен на внутреннюю поверхность лампы, а анод 2 выполняется в виде кольца или пластины. Нередко в лампу вводят некоторое количество нейтрального газа (аргона), который не окисляет поверхность металла, но способен ионизироваться под ударами летящих электронов и увеличивать за счет своих ионов значение протекающего тока. Под действием световой энергии с поверхности выбиваются электроны, образующие электрический ток (внешний фотоэффект). Промышленность выпускает фотоэлементы следующих типов: ЦГ – цезиевый газонакопленный; СЦВ – сурьмяно-цезиевый, вакуумный; ЦВ – цезиевый, вакуумный.
Фотоэлементы с внешним фотоэффектом обладают высокой чувствительностью и высокой температурной стабильностью. Для них характерна линейная зависимость фототока от светового потока. К числу недостатков рассмотренных фотоэлементов, которые ограничивают их применение в автоматических системах управления, относятся: необходимость в повышенном напряжении питания; хрупкость стеклянного баллона; старение и утомляемость, т. е. снижение чувствительности при сильной освещенности.
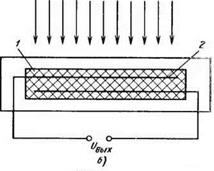
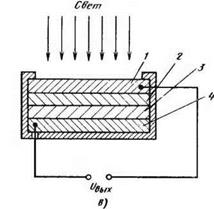
Рис. 10. Фотоэлектрические преобразователи:
а – с внешним фотоэффектом; б – с внутренним фотоэффектом; в – вентильные
Фотоэлементы с внутренним фотоэффектом (фоторезисторы) чувствительнее элементов первого типа, использующих фотоэффект со свободной поверхности металла. Фотоэлементы с внутренним фотоэффектом не нуждаются во вспомогательной энергии, и им может быть придана весьма разнообразная и очень удобная форма. Недостатками их являются: подверженность влиянию окружающей температуры, утомляемость и высокая инерционность. Последнее ограничивает применение фотоэлементов с внутренним фотоэффектом при частоте прерывания светового потока в несколько десятков герц.
Фоторезисторы (рис. 10, б) представляют собой стеклянную пластинку 1 с нанесенным тонким слоем селена или сернистых соединений различных металлов (таллия, висмута, кадмия, свинца). К пластине прикреплены электроды 2, имеющие контакт с полупроводниковым слоем. Размеры фоторезисторов очень невелики. При подаче к электродам напряжения через фоторезистор будет протекать ток, значение которого пропорционально освещенности. Зависимость тока от освещения имеет нелинейную величину. Однако чувствительность фоторезисторов в. сотни раз превышает чувствительность вакуумных элементов, что позволяет их использовать в автоматических устройствах без усилителей.
У вентильных преобразователей свободные электроны, изменяя свою энергию под действием светового потока, остаются в веществе. В промышленности получили наибольшее распространение селеновые и меднозакисные фотоэлементы.
Селеновый фотоэлемент (рис. 10, в) имеет четыре рабочих слоя. Первый слой образован тонкой пленкой золота 1, далее идут запирающий слой 2, селеновый слой 3 и стальная подкладка 4. Запирающий слой, обладая детекторным свойством, пропускает электроны, выделившиеся из пленки золота и препятствуют прохождению электронов противоположного направления. Таким образом, световой поток, проходя через пленку золота, создает вентильный фотоэффект, т.е. электроны из освещенного слоя переходят в неосвещенный. Это приводит к возникновению разности потенциалов Uвых.
Фотоэлектрические преобразователи просты по устройству и достаточно надежны в работе. Они находят широкое применение в системах автоматики в литейных и термических цехах: для автоматического управления освещением цехов, для измерения температуры жидкого металла и нагретых деталей (фотоэлектрический пирометр), определения прозрачности жидкостей или газов, подсчета форм и изделий, проходящих по конвейеру, для контроля пламени в топках топливных печей. Они применяются в системах защиты обслуживающего персонала от травм и т. п. В целом возможности фотоэлектрических преобразователей в металлургическом производстве чрезвычайно велики.
Контрольные вопросы и задания
1. Какие элементы автоматического управления (контроля) называются первичными преобразователями (датчиками)?
2. В чем заключается различие между параметрическими и генераторными преобразователями?
3. Расскажите об устройстве потенциометрических преобразователей,
4. Почему у индуктивных преобразователей статическая характеристика (вход-выход) нелинейная?
5. Расскажите об устройстве трансформаторного преобразователя.
6. Объясните принцип действия ферродииамического преобразователя.
7. Объясните принцип действия и назначение емкостных преобразователей.
8. В чем заключаются достоинства и недостатки тензометрических преобразователей?
9. Перечислите типы фотоэлектрических преобразователей и укажите их достоинства н недостатки.
10. Объясните принцип действия фотоэлектрических преобразователей.
Лабораторная работа 1. Исследование статических характеристик тензометрических преобразователей
Цель работы. Изучить конструкцию и принцип действия проволочных и фольговых тензорезисторов. Получить статические характеристики испытуемых преобразователей.

Рис. 11. Лабораторнаи установка для испытания тензорезисторов:
а – схема включення; б – схема нагружения
Описание лабораторной установки. Лабораторная установка представляет собой устройство (рис. 11) для испытаний тензорезисторов со схемой для получения основных характеристик тензорезисторов. С целью получения зависимостей выходной величины тензорезистора от приложенных усилий в схеме необходимо использовать приборы для измерения электрического тока.
Порядок выполнения работы. 1. Ознакомиться с преобразователями, установленными на стенде, и изучить электрическую схему соединений тензорезисторов и измерительного прибора. 2. Собрать электрическую схему испытаний (рис. 11, а). 3. Изменяя массу груза т от нуля до максимального и от максимального до нуля, снимают зависимости для тензорезисторов I = f (m). Для повышения чувствительности тензорезисторов два из них R1 и R2 наклеивают на стальную пластину сверху и снизу. 4. Результаты измерений заносят в протокол испытаний и по ним строят зависимость I = f (σ), где σ – напряжение изгиба, определяемое как отношение момента изгиба М к моменту сопротивления пластины N в месте наклейки терморезисторов; σ = M/N; М = mL; N = bh2/6, где b и h – ширина и высота пластины, м; I – расстояние от места приложения груза до центра тензорезистора, м.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|