- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Фотограмметрические методы сгущения геодезической опоры.
5. Фотограмметрические методы сгущения геодезической опоры.
5.1. Теоретические основы построения аналитической аэрофототриангуляции способом связок
Для решения задачи сгущения геодезической опоры фотограмметрическим методом в способе связок составляются уравнения связи определяемых параметров и измеренных величин – параметрические уравнения поправок - на основе уравнений коллинеарности (3.18),(3.19). Их линейный вид после разложения в ряд Тейлора следующий
 (5.1)
(5.1)
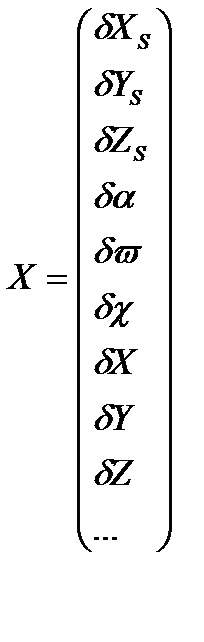
где dX S, dYS , dZS , da, dw, dc , dX , dY, dZ – поправки к приближенным значениям неизвестных параметров:
- координатам центров проекций -X 0S , Y0 S , Z0S ,
- угловым элементам внешнего ориентирования a0 ,w0 ,c0 ,
- координатам определяемых точек Xº,Yº,Zº.
а, b,... m / – частные производные от функций (3.18),(3.19). по соответствующим неизвестным;
Vx и VY – поправки к измеренным на снимке координатам x и y;
x в и yв – вычисленные по формулам(3.18),(3.19) координаты точки аэрофотоснимка при приближенных значениях неизвестных параметров:
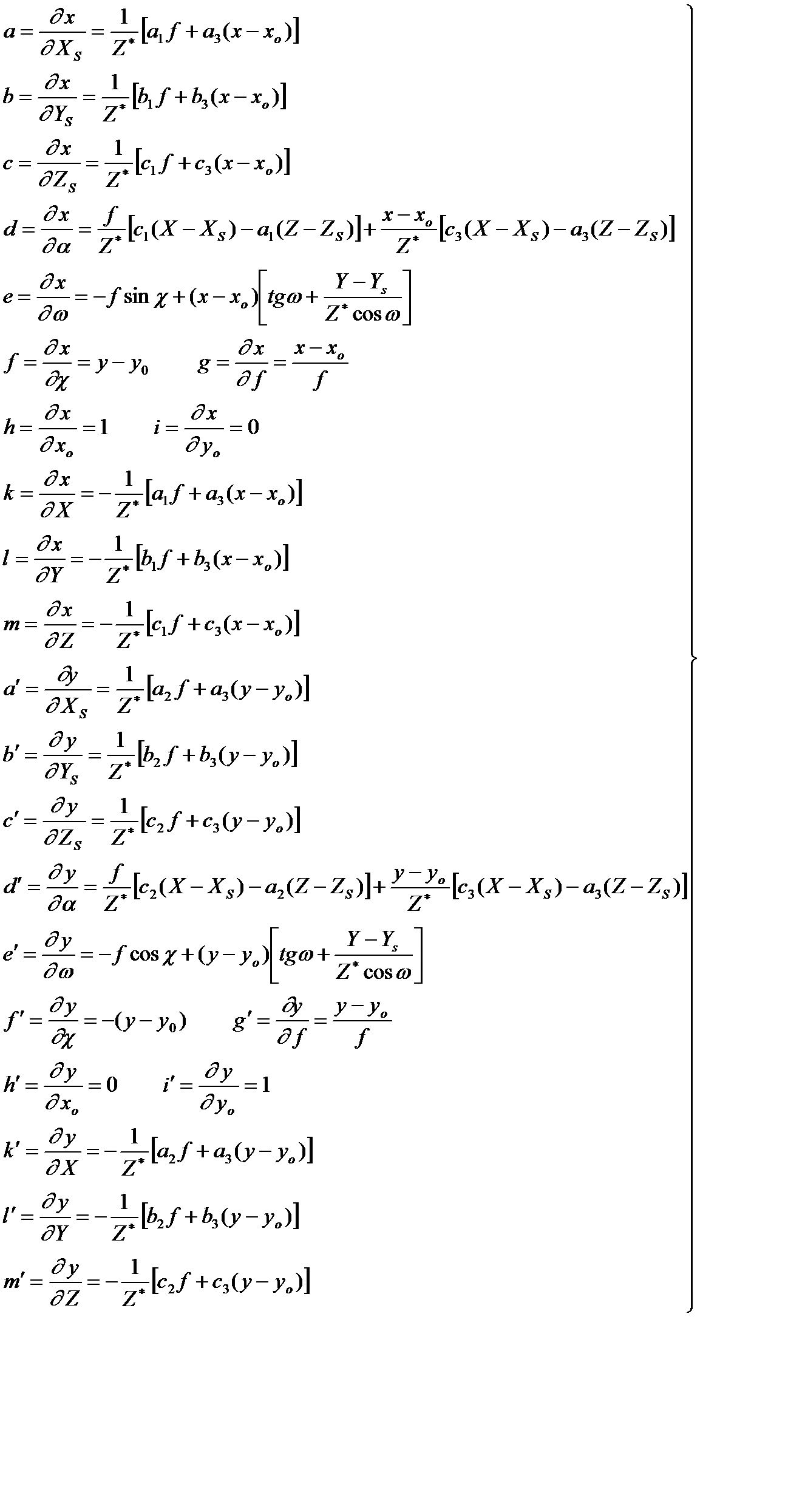
Значения частных производных а, b,... m / в (5.1) имеют следующий стандартный вид
 (5.2)
(5.2)
где a1 ... a3 , b1 ... b3 , c1 ... c3 – значения направляющих косинусов, определяемых в соответствии с (3.10) по формулам ( 5.3)
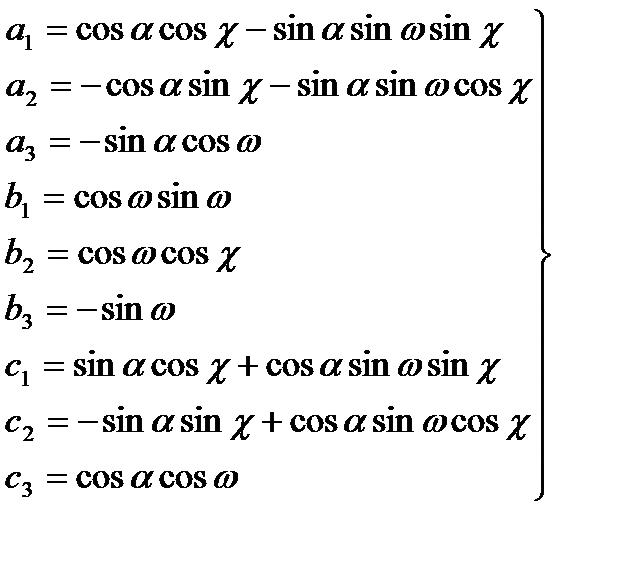 (5.3)
(5.3)
Величина  определяется по формуле:
определяется по формуле:
 . (5.4)
. (5.4)
Отметим, что в (5.1) коэффициенты g,,h,i,g',h´,i' относятся к поправкам в элементы внутреннего ориентирования (xо,yо – координаты главной точки снимка,f – фокусное расстояние) правого и левого снимков. Однако на практике эти элементы известны и в уравнения поправок не включаются.
Уравнения (5.1) составляются для всего объекта – маршрута или блока снимков. Если
ввести матричные обозначения:

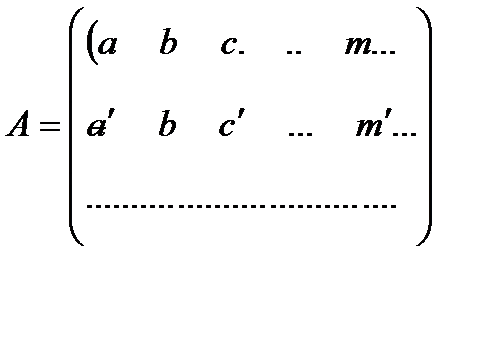 ,
,
 ,
,
 ,
,
то для всего объекта система уравнений (5.1) примет вид
 (5.5)
(5.5)
Поскольку уравнений (5.1) всегда больше числа неизвестных параметров, то переопределенная система уравнений (5.5) решается методом максимального правдоподобия в предположении распределения ошибок измерений по нормальному закону. Такое решение в теории математической обработки геодезических измерений называется уравниванием. При этом должен достигаться минимум следующего функционала
 ,
,
где Р –весовая матрица измерений.
Минимизация такого функционала называется уравниванием по методу наименьших квадратов
Для получения решения производная  по
по  приравнивается к нулю
приравнивается к нулю
 ,
,
или
что соответствует уравнению
 .
.
После раскрытия скобок получим систему нормальных уравнений
 , (5.6)
, (5.6)
где
 . (5.7)
. (5.7)
Из ее решения находится вектор параметров
 (5.8)
(5.8)
Такое решение допустимо, если приближенные значения неизвестных параметров
достаточно точно известны. В случае, когда приближенные значения угловых ЭВО
известны с точностью до одного градуса, а координаты определяемых точек с точностью нескольких метров, решение находится методом приближений .
Следующее приближение выполняется так:
-на основе предыдущего приближения находится исправленный вектор приближенных
значений неизвестных параметров
 , (5.9)
, (5.9)
где  ,
,  - значения вектора неизвестных параметров в приближениях n и n-1
- значения вектора неизвестных параметров в приближениях n и n-1
 - решение (5.8) в приближении n.
- решение (5.8) в приближении n.
- с учетом новых значений вектора неизвестных параметров составляется система (5.5) и решение повторяется по алгоритму (5.6)-(5.8).
- если поправки Х в приближенные значения параметров не превосходят наперед заданной величины – приближения завершаются.
Точность вектора Х характеризуется его следующей корреляционной матрицей
 , ( 5.10)
, ( 5.10)
де σ – стандарт измерения, вес которого принят равным единице. Такими измерениями являются измерения координат точек на снимке. Оценкой величины σ после уравнивания является средняя квадратическая ошибка измерения, вес которого равен единице
 (5.11)
(5.11)
где  число избыточных измерений в уравниваемом объекте, определяемое по
число избыточных измерений в уравниваемом объекте, определяемое по
формуле
 (5.12)
(5.12)
где  число уравнений поправок,
число уравнений поправок,  число неизвестных параметров.
число неизвестных параметров.
Диагональные элементы матрицы (5.10) являются дисперсиями параметров, полученных из уравнивания.
Дополнительно отметим, что в аэрофототриангуляции оценка точности производится и по контрольным точкам в соответствии с Инструкцией по фотограмметрическим работам при создании цифровых топографических карт и планов.- ГКИНП(ГНТА)-02-036-02-М.,ЦНИИГАиК.-2002-100с(далее просто - Инструкцией по фотограмметрическим работам) .
5.2.Пример построения аналитической аэрофототриангуляции в среде Excel. Выполнение первого приближения
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|