- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
АНАЛІЗ ПЕРЕХІДНИХ ПРОЦЕСІВ ПРИ РЕГУЛЮВАННІ
ЧАСТОТИ І ПОТУЖНОСТІ В ЕНЕРГОСИСТЕМАХ
Мета роботи - оцінка динамічних властивостей автоматичної системи регулювання частоти і потужності в енергосистемі з теплових станцій при різних значеннях параметрів настройки регулятора.
3.1 Основні відомості
Відхилення частоти, на відміну від відхилення напруги, є загальносистемним показником якості електричної енергії, тому що у всіх точках синхронно працюючої системи частота однакова. Зміна частоти відбувається при порушенні балансу між сумарною потужністю турбін і активним навантаженням генераторів.
При зміні частоти в більшості споживачів міняється продуктивність, що в ряді випадків відбивається на технологічному процесі елементів і енергосистеми в цілому.
Відповідно до діючого ДСТУ припустимі відхилення частоти повинні бути  0,2 Гц (0,4%), а у европейских енергосистемах UCTE - ±0,01 Гц.
0,2 Гц (0,4%), а у европейских енергосистемах UCTE - ±0,01 Гц.
Безперервна підтримка номінального значення частоти в енергосистемі досягається за допомогою автоматичної системи регулювання частоти і потужності (АСРЧ і П), що включає в себе автоматичний регулятор частоту обертання (АРЧО) турбіни і автоматичний регулятор частоти і потужності (АРЧ і П) і агрегат.
Регулятор частоти обертання - первинний регулятор турбіни. Він автоматично змінює обертаючий момент турбіни, впливаючи через регулювальний орган на впуск енергоносія (пару, води). У якості регулюючого органу парової турбіни застосовуються регулювальні клапани. АРЧО виконує наступні основні функції [1]:
- регулювання частоти обертання за прийнятим законом;
- обмеження можливих збільшень частоти обертання при перехідних процесах;
- пуск і зупинка турбіни;
- зміна частоти обертання при синхронізації генератора;
- розподіл навантаження між генераторами, що працюють паралельно,.
На парових турбінах може застосовуватися гідромеханічний АРЧО, функціональна схема якого показана на рис. 3.1 [1, 2].
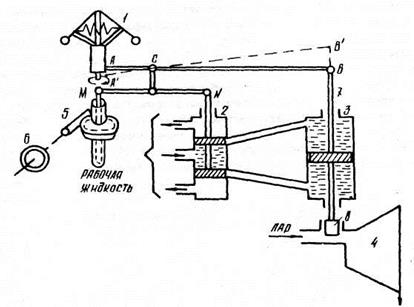
1 - відцентровий маятник; 2 - золотник; 3 - сервомотор;
4 - парова турбіна; 5 – механізм керування турбіною;
6 - електродвигун; 7- важіль ЖЗЗ; 8 - регулювальний орган
Рисунок 3.1 - Функціональна схема гідромеханічного АРЧО:
Регулятор працює в такий спосіб. При зміні частоти обертання турбіни, наприклад, убік зменшення, маятник 1 переміщає муфту з положення А вниз. Поршень золотника 2 з середнього положення також опускається вниз. Важіль АВ займає положення А' B'. Масло під тиском починає надходити в нижню порожнину сервомотора 3, а з верхньої порожнини йде на злив. Поршень сервомотора, переміщаючись впливає на регулювальний орган 8, який збільшує впуск пару в турбіну. Цей регулюючий вплив сприяє збільшенню частоти обертання, тобто переміщенню важеля АВ нагору. На переміщення точки С впливає переміщення поршня сервомотора завдяки жорсткому зворотному зв'язку (ЖЗЗ) 7.
Регулювання буде тривати доти, поки поршень золотника 3, а отже, і точка С не повернуться знову у вихідне положення, при якому вікна золотника 2 будуть закриті. Сталий режим наступає при зниженій швидкості обертання агрегату, тому що під дією ЖЗЗ важіль АВ займе вихідне положення А В.
Якщо прийняти, що прирощенню точок А и В відповідає DА=K1×Df, DВ= K2×DР , то умова сталого режиму (закон регулювання агрегату) :
Df+S×DР=0 , (3.1)
де S=Df/DР - коефіцієнт статизму характеристики АСРЧО.
Таким чином, регулювання частоти залежно від потужності, що розвивається агрегатом, АРЧО здійснює за законом статичного регулювання.
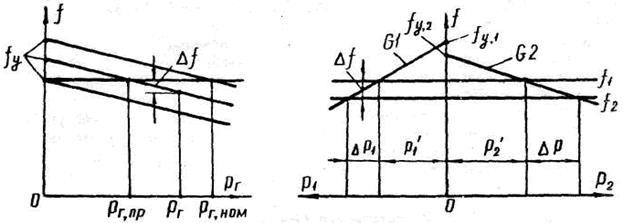 |
Для зсуву статичної характеристики регулювання уздовж осі f служить механізм керування турбіною (МКТ) 5. Переміщуючи за допомогою МКТ точку М нагору (при цьому змінюється уставка регулювання), впливають на поршень золотника, переміщуючи його вниз. Збільшення впуску пару приведе до збільшення частоти обертання при роботі генератора на ізольоване навантаження. При роботі генератора в енергосистемі (при незмінній частоті) за допомогою МКТ можна змінювати навантаження агрегата в межах його регулювального діапазону (рис. 3.2.а).
 |
а б
Рисунок 3.2 - Статичні характеристики АСРЧО: а - астатичне регулювання частоти статичним АРЧО; б - розподіл навантажень між двома паралельно
працюючими агрегатами
Розглянутий закон регулювання (3.1) може бути також представлений виразом:
 f+ S(Рг - Рг,пр)=0,
f+ S(Рг - Рг,пр)=0,
де Рг – поточна потужність, що розвивається генератором;
Рг,пр – запропонована (задана) потужність.
Під запропонованою потужністю розуміється її значення при номінальній частоті і даному положенні статичної характеристики. Отже, при заданої уставці АРЧО (рис. 3.2,а). Закон статичного регулювання має місце при Рг,пр = constіDf ¹ 0.
Статичний АРЧО забезпечує однозначність розподілу активних навантажень між паралельно працюючими генераторами при будь-якому значенні частоти. Це ілюструється графіками на рис. 3.2,б , де зображені статичні характеристики АСРЧО генераторів G1 і G2, що мають уставки fy,1і fy,2і коефіцієнти статизму S1 і S2. Частоті f1 відповідають навантаження генераторів Р'1 і Р'2. При збільшенні сумарного навантаження на ΔР і зниженні частоти на Df до значення f2одержимо:
 ,
,  , де
, де  ; ΔР =ΔР1 +ΔР2. Звідки маємо:
; ΔР =ΔР1 +ΔР2. Звідки маємо:
 (3.2)
(3.2)
З виразу (3.2) слідує, що збільшення навантаження електростанції DР розподіляється зворотно пропорційно коефіцієнтам статизма характеристик АСРЧО.
При використанні статичного регулятора частота в енергосистемі не підтримується з необхідною точністю і залежить від активного навантаження електростанцій. Коефіцієнт статизму енергосистеми Sc не буває нижче середнього значення коефіцієнта статизма окремих АСРЧО (4¸5 %). Однак відповідно до нормативних вимог відхилення частоти не повинна бути більше 0,4%, що обумовлює необхідність регулювання частоти за астатичним законом. Таке регулювання може бути реалізоване шляхом автоматичної зміни уставки АСРЧО, тобто переміщенням його статичної характеристики. При цьому змінюється запропоноване значення потужності Рпр у законі статичного регулювання:
Δf + Sс×(Р - Рпр)=0.
Рішення цієї задачі досягається регулятором АРЧ і П, що називається вторинним регулятором частоти. Цей регулятор призначений для виконання наступних функцій:
- підтримки частоти в енергосистемі в заданих межах;
- економічного розподілу навантаження між паралельно працюючими генераторами (електростанціями), що забезпечує мінімум виробничих витрат по енергосистемі при даному сумарному споживанні активної потужності і розміщенні споживачів;
- обмеження потоків активної потужності в сильно завантажених лініях електропередачі з метою попередження порушення статичної стійкості енергосистеми.
Відомі методи регулювання частота і потужності розділяються на два види: регулювання за миттєвим і за інтегральним відхиленням частоти [10].
У першому методі однозначність у розподілі визначається тим, що сигнал запропонованого значення потужності Рпр вводиться в закон регулювання в явному виді. У методі інтегрального регулювання сигнал Рпр визначається непрямим шляхом - через інтегральне відхилення частоти в енергосистемі.
У даній роботі досліджується АРЧ і П за інтегральним відхиленням.
Інтегральна функція відхилення частоти формується за виразом [1]:
де t0 і t1 – часи виникнення і зникнення Δf; k – коефіцієнт пропорційності.
Для оптимального розподілу навантаження між агрегатами частотнорегулюємої станції по рівності відносних приростів витрати енергоносія величина δfповинна бути перетворена в Рпр,i, що може бути реалізовано відповідним вибором коефіцієнта k. У цьому випадку інтегральна функція використовується як міра відносного приросту, а значення Рпр визначається функціональним перетворенням характеристики відносного приросту витрати палива (ХВП) агрегату згідно виразу:
 (3.3)
(3.3)
Спосіб реалізації цієї автоматичної системи регулювання ілюструється на прикладі блокової електростанції, схема якої наведена на рис. 3.3. У регулюванні частоти беруть участь n турбоагрегатів. Регулюючий вплив на МКТ i - го агрегату формується за законом:
 , (3.4)
, (3.4)
де kf×Df – регулюючий вплив, що обумовлений відхиленням частоти від номінального значення;
kSi – коефіцієнт, що забезпечує відповідність регулюючих впливів;
Рi - потужність i -го агрегату;
 - запропонована потужність i- го агрегату.
- запропонована потужність i- го агрегату.
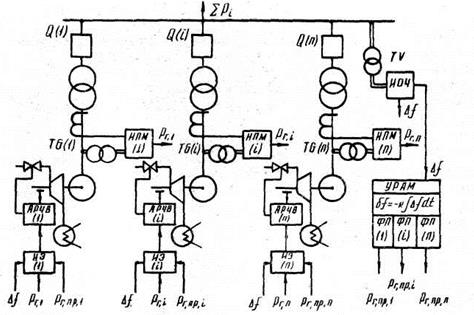
Рисунок 3.3 - Функціональна схема вторинного регулювання частоти і
потужності за пропорційно-інтегральним відхиленням
Для визначення Рпр,iпо ХВП i -го агрегату служить пристрій розподілу активної потужності (УРАМ), у якому формується інтегральна функція df і відбувається її функціональне перетворення в Рпр,i. На кожному з nвиходів УРАМ формується для кожного агрегату Рпр,i.
Регулюючі впливи, створені відповідно до (3.4) реалізуються через виконавчий елемент ИЭ, характеристика якого забезпечує реверсивну роботу електродвигуна МКТ, тобто є дія убік як збільшення, так і зменшення навантаження агрегату.
Процес регулювання протікає в такий спосіб. При порушенні балансу активних потужностей в енергосистемі з'являється відхилення частоти від номінального значення (Δf ≠ 0). При цьому відбувається автоматична зміна потужності Рпр,i, що задається кожному агрегату. Під дією сигналів kf×Df і Рi-Рпр,iзмінюється потужність агрегатів. Регулювання припиниться тоді, коли перестануть змінюватися Рпр,i, тобто коли відновиться номінальна частота. У сталому режимі частота номінальна, а розподіл навантажень оптимальний при нових значеннях Рпр,i:
Δf=0; Рi = Рпр,i.
Важливо відзначити, що сигнал, пропорційний інтегральному відхилення частоти, сповільнює процес регулювання. Для підвищення якості регулювання використовується сигнал kf×Df. Таким чином, АРЧ і П реалізує пропорційно-інтегральний закон регулювання.
Дослідження динаміки АСРЧ і П виконується при наступних основних допущеннях [2, 3].
Енергосистема приведена до одного узагальненого агрегату "турбіна-генератор", що дозволяє розглядати загальний (середній) рух паралельно працюючих агрегатів (електростанцій). Це допущення досить близько до дійсності для зосереджених енергосистем при однакових характеристиках регулюючих пристроїв на всіх агрегатах.
Перехідні процеси в парогенераторах не враховуються, тому що вони протікають набагато повільніше, ніж в АСРЧ і П.
Передбачається, що апаратура АРЧ і П ідеально реалізує заданий закон регулювання, тому динамічні параметри конкретної апаратури не враховуються.
При цих допущеннях структурна схема АРЧ і П для малих відхилень змінних величин наведена на рис. 3.4 [10].
Рисунок 3.4 - Структурна схема AСР частоти і потужності за пропорційно-інтегральним відхиленням в енергосистемі з теплових електростанцій
Інтегруюча ланка 1 представляє обертові маси енергосистеми зі сталою часу ТJ. Зворотний зв'язок, що охоплює цю ланку, ураховує регулюючий ефект навантаження. Передатна функція нерегульованої енергосистеми записується у вигляді:
 .
.
Для реальних енергосистем ТJ ≈ 10 с. Коефіцієнт регулюючого ефекту навантаження (kн =ΔР*/Δf*) залежить від состава споживачів енергосистеми. Для різних енергосистем з характерним для них составом споживачів kн різний і перебуває в межах 1 ¸ 3 [10]. Це значить, що при зниженні частоти на 1% (0,5 Гц) споживання активної потужності зменшиться на 1 ¸ 3 %, а при підвищенні частоти збільшиться на 1 ¸ 3 %.
Інерційна ланка 2 відображає процес перетворення потужності потоку енергоносія в потужність на валу турбоагрегату. При незмінному тиску пару перед турбіною витрата пару, що визначає потужність на валу, залежить тільки від зміни відкриття регулювального клапана або положення поршня сервомотора (див. рис.3.1). Інерційність ланки визначається паровим об'ємом, що розташований між регулювальним клапаном і першим рядом сопел турбіни, характеризується сталою часу Tп. Чисельно величина Tп становить 0,2 ¸ 0,4 с. Передатна функція турбіни має вигляд:
 .
.
Ланки 3 і 4 представляють АРЧО. Вимірювальна частина регулятора приймається ідеальною і описується передатним коефіцієнтом 1/S, що зв'язує відхилення частоти Δω на вході ланки 4 з сигналом DY (наприклад, зсув муфти відцентрового регулятора). На виході ланки 3 має місце сигнал DZ (збільшення положення регулювального органа турбіни). Ланка 3 представляє гідравлічний сервопривод зі сталою часу сервомотора Тс. У динамічному відношенні ланка 3 розглядається як інерційна першого порядку з передатною функцією:
 .
.
Еквівалентний статизм енергосистеми Sс (0,1 ¸ 0,15) значно перевищує статизм регуляторів окремих турбін (0,04 ¸ 0,05), тому що звичайно АРЧО на частині агрегатів не працює за різних причин (нечутливість, граничне навантаження та ін.). Стала часу Тсприймається рівною 0,25 або 0,5 с.
АРЧО, як показано було раніше, регулює частоту за статичним законом. При виникненні збурювання ΔРн частота (у відносних одиницях) у сталому режимі після дії АРЧО зміниться на величину:
 . (3.5)
. (3.5)
Ланка 5 відображає люфт МКТ (3,5%).
Ланка 6 - електродвигун МКТ. Стала часу двигуна приймається ТДВ = 0,25 с.
Ланка 7 з коефіцієнтом g визначає пропорційний, а ланки 8 і 9 формують інтегральний вплив АРЧМ з коефіцієнтом a. Функціональний перетворювач ФП у ланцюзі інтегрального впливу відображає нелінійну залежність навантаження даної електростанції від відносного приросту (зворотну ХВП). У роботі цю нелінійність можна не враховувати.
Якщо знехтувати впливом зворотного зв'язку за потужністю ΔРЭ , ланка з коефіцієнтом β виявляється включеним послідовно з ланками 7 і 9. Отже, добутки a×b і g×b є приблизно коефіцієнтами відповідно інтегрального і пропорційного впливу регулятора потужності.
Параметри a, b і g, що настроюються, підбираються таким чином, щоб забезпечувалася оптимальна якість регулювання частоти: при мінімальному часі регулювання, перерегулювання відсутнє або не перевищує 10% ¸ 20% [10].
Дослідження АРЧ і П виконується за допомогою програми IMDS (див. додатки А и Б).
3.2 Порядок виконання роботи
1. Скласти структурну схему моделювання АРЧ і П за допомогою пакета IMDS. Ланки 5, 8 можна не враховувати.
2. Використовуючи дані табл. 3.1 і рис. 3.4 скласти текст програми для структурної схеми АРЧ і П (при першому розрахунку прийняти α= 1 і γ = 0,01, що практично відповідає виключенню пропорційного впливу на систему регулювання).
3. В результаті моделювання на ЕОМ роботи тільки АРЧО за отриманим даними розрахувати перехідну характеристику Δω(t). По характеристиці визначити відхилення Dwу сталому режимі при первинному регулюванні і порівняти його з розрахованим за формулою (3.5).
4. Визначити коефіцієнта α і γ, що настроюються,за умовою забезпечення оптимальної якості регулювання частоти. Рекомендується при розрахунку на ЕОМ α і γзмінювати в межах:
при β = 0,1; α = 1; 2; 5; 10 і γ = 5; 10; 20; 50;
при β = 1; α = 0,5; 1; 2 і γ = 2; 5; 8; 10.
5. Дослідити вплив люфту МКТ на якість регулювання для одного з оптимальних значень α і γ.
Таблиця 3.1 - Вихідні дані для дослідження АСРЧ і П
| Номер варіанта | TJ, c | kH | Tп, c | S | ΔPH, о.е. |
| 1, 11 2, 12 3, 13 4, 14 5, 15 6, 16 7, 17 8, 18 9, 19 10, 20 | 1,8 1,9 2,0 2,1 2,2 1,8 1,9 2,0 2,1 2,2 | 0,2 0,25 0,28 0,3 0,25 0,3 0,28 0,25 0,23 0,2 | 0,1 0,1 0,12 0,12 0,14 0,14 0,14 0,1 0,1 0,12 | 0,01 0,02 0,01 0,02 0,01 0,02 0,01 0,02 0,01 0,02 |
Примітка до табл. 3.1 . Для варіантів 1 – 10 прийняти Тс =0,25 c і β = 0,1 а для варіантів 11 – 20 - Тс=0,5 c і β = 1.
3.3 Зміст звіту
1. Мета роботи.
2 Вихідні дані.
3. Структурна схема АСРЧ і П.
4. Структурна схема моделювання АСРЧ і П за допомогою пакета IMDS.
5. Програма і результати розрахунку.
6. Привести криві перехідного процесу для АРЧ і П у координатах α×β та γ×β і окремо - криві перехідного процесу при тільки первинному регулюванні частоти.
7. Аналіз отриманих результатів.
3.4 Контрольні питання
1. Поясните необхідність підтримки частоти в енергосистемі з високою точністю.
2. Які основні методи регулювання частоти в енергосистемі?
3. У чому полягає сутність первинного і вторинного регулювання?
4. Призначення регулятора частоти обертання турбіни.
5. Що таке регулюючий ефект навантаження?
6. Які вимоги пред'являються до показників якості регулювання частоти?
7. Як зміниться якість регулювання частоти при виключенні регулюючого впливу, пропорційного відхиленню частоти?
8. За якими критеріями може здійснюватися розподіл активної потужності станції між паралельно працюючими генераторами.
9. Функції регулятора частоти обертання турбіни.
10. Опишіть роботу АСРЧ і П за пропорційно - інтегральному відхиленню частоти за допомогою схеми на рис. 3.3.
11. Як здійснюється астатичне регулювання частоти статичним АРЧО?
12. Закон регулювання частоти і потужності має вигляд Δf + Sс×(Р - Рпр)=0. Укажіть особливості запису цього закону при статичному і астатичному регулюванні.
13. Як моделюється електрична система і парові турбіни?
14. Які задачі покладають на частотнорегулювані станції?
15. Які системи регулювання частоти і потужності використовуються для керування частотнорегулюваними станції.
16. Які допущення прийняті при моделюванні АСРЧ і П?
Лабораторна робота №4
АНАЛІЗ ПЕРЕХІДНИХ ПРОЦЕСІВ В ОБ'ЄДНАНІЙ ЕНЕРГОСИСТЕМІ ПРИ РЕГУЛЮВАННІ ЧАСТОТИ І ПЕРЕТІКАННЯ ПОТУЖНОСТІ
Мета роботи: оцінка динамічних властивостей автоматичної системи регулювання частоти і перетікання потужності в об'єднаній енергосистемі при різних значеннях настроювальних параметрів.
4.1 Основні відомості
В об'єднаній електроенергетичній системі (ОЕС) є декілька взаємно зв'язаних електроенергетичних систем (ЕЕС). У кожній з ЕЕС установлені АСРЧ і П зі статизмом за перетіканням потужності в лініях зв'язку [2], які забезпечують спільне регулювання частоти і перетікання потужності. Закон регулювання для кожної ЕЕС має вигляд:
 ,
,
де kп – коефіцієнт, що визначає відповідність регулюючих впливів,
Рпер,пр – запропоноване значення потужності перетікання.
Для кожної ЕЕС закон реалізується з урахуванням знака потужності перетікання. Реалізація цього закону регулювання може здійснюватися як за миттєвим відхиленням частоти і потужності, так і за інтегральною функцією.
Зміною коефіцієнта kп можна так настроїти АСРЧ і М кожної ЕЕС, щоб зміни навантаження в даної ЕЕС покривалися зміною потужності тільки її частотнорегульованими електростанціями. При цьому буде мати місце автономність ЕЕС. Таке настроювання досягається при коефіцієнті kп рівному коефіцієнту статизма даної ЕЕС.
Дослідження перехідних процесів пов'язаних з регулюванням перетікання потужності неможливо при приведенні енергосистеми до одного агрегату. Тому розглянемо систему, що складається із двох енергосистем у вигляді двох концентрованих частин, близьких або однакових за потужністю. Нехай частини цієї об'єднаної енергосистеми мають однакові номінальні потужності і однакові еквівалентні сталі механічної інерції TJ. Нехай також ці частини однаково навантажені, а перетікання між ними становить невелику частку їхньої потужності. Тоді можна в лінійному наближенні записати рівняння руху у відносних відхиленнях:
Другі члени кожного рядка відповідають місцевому навантаженню енергосистеми, що є функцією частоти. Треті члени - синхронної потужності, що віддається (одержується) по лінії, яка зв'язує частині об'єднаної енергосистеми між собою. Четверті члени визначають збільшення асинхронної потужності в кожній енергосистемі. Члени в правій частині рівняння представляють собою збурювання за навантаженням, що прийняті не залежними від частоти. Умова однакового завантаження ЕЕС дозволила прийняти в (4.1) рівність коефіцієнтів регулюючого ефекту навантаження kн,а відносно мала величина перетікання - рівність коефіцієнтів Аді Тд [10]. Всі величини в (4.1) віднесені до потужності частин об'єднаної енергосистеми.
Рівнянням (4.1) відповідає структурна схема на рис. 4.1, де:
 . (4.2)
. (4.2)
Рисунок 4.1 - Структурна схема нерегульованої об'єднаної енергосистеми
Рівняння (4.1) і схема на рис. 4.1 складені виходячи з припущення, що збурювання DРн у початковий момент сприймаються станціями тільки своєї енергосистеми. У випадку слабкого зв'язку між енергосистемами це практично відповідає дійсності, тому що збурювання спочатку розподіляється зворотно пропорційно реактивностям, що зв'язують точку прикладення збурювання з точками прикладання ЕРС. Однак іу всіх інших випадках похибка, що має місце тільки поблизу t=0, не істотна при аналізі процесів регулювання частоти і потужності. За незалежні змінні в (4.1) прийняті частоти w1 і w2 кожної із частин енергосистеми. Характеристичний визначник системи рівнянь (4.1) буде мати вигляд:
 . (4.3)
. (4.3)
Він розкладається на два співмножника. З врахуванням цього характеристичне рівняння буде мати вигляд:
 . (4.4)
. (4.4)
Кожний зі співмножників відповідає певному руху в об'єднаній енергосистемі, а умови стійкості можуть визначатися на основі розгляду кожного з них окремо. Щоб з'ясувати, з яким саме рухом зв'язаний кожний співмножник, вирішимо систему (4.1) відносно w1 і w2 при східчастому збурюванні DРн1 і запишемо операторні вирази величин (w1 - w2) і (w1+w2)/2:
 (4.5)
(4.5)
 (4.6)
(4.6)
З (4.5) і (4.6) маємо, що перший співмножник характеристичного багаточлена (4.4) відноситься до зміни середньої частоти в об'єднаної енергосистеми, а другий - до зміни різниці частот двох енергосистем. Якщо помножити різницю частот на Wc(p),тоодержимо oпeраторний вираз зміни перетікання потужності між частинами об'єднаної енергосистеми:
 . (4.7)
. (4.7)
Вираз (4.5) відповідає перехідної характеристики у вигляді експоненти, що має при типових значеннях параметрів енергосистем (ТJ = 10 с, kн = 2) сталу часу 5 с. У вираз (4.6) замість Wc(p) підставимо (4.2):
 . (4.8)
. (4.8)
Знаменник виразу (4.8) при будь-яких реальних значеннях параметрів має один від’ємний і два комплексних сполучених корені, а різниця частот містить дві складові: аперіодичну (експоненціальну) і коливальну згасаючу, що прагне до нуля в часі і зменшується в міру посилення зв'язку частин об'єднаної енергосистеми (збільшення Асі Ад) [10]. Аперіодична складова практично при всіх значеннях параметрів залишається незначною. При досить сильному зв'язку різниця w1 - w2 стає дуже малою. При цьому практично залишається тільки одна змінна середня частота. Цей випадок був предметом розгляду при приведенні енергосистеми до одного агрегату (див. роботу №3). Коефіцієнт 2, що з'явився в (4.5), зв'язаний лише з тим, що величина збурювання DРН1 в (4.1) і наступних виразах віднесена до потужності кожної частини, тобто до половини потужності об'єднаної енергосистеми.
Відмовимося від рівності частин об'єднаної енергосистеми за потужністю, але збережемо рівність виражених у відносних одиницях параметрів TJі kн. Таке допущення близько до дійсності практично для всіх однорідних за составом частин об'єднаної енергосистеми (наприклад, тілько з теплових станцій або з однаковою питомою вагою ГЕС).
Для спільного рішення рівнянь (4.1) у цьому випадку необхідно прийняти однакове значення базисної потужності. Нехай це буде потужність першого району Р1. В результаті одержимо характеристичний визначник, що буде розкладатися на такі множники:
 . (4.9)
. (4.9)
У цьому випадку також перший співмножник відповідає процесу зміни середньозваженого по потужності енергосистем значення частоти:
 , (4.10)
, (4.10)
а другий, як і раніше, процесу зміни різниці частот:
 . (4.11)
. (4.11)
При P1 = P2вирази (4.9) - (4.11) перетвориться відповідно в (4.4) - (4.6).
Для регульованої об'єднаної енергосистеми в лівих частинах рівнянь (4.1) з'являться члени, що відповідають регулюючим впливам. Якщо ці впливи однакові в обох частинах енергосистеми, то система залишається симетричною, і характеристичний визначник по колишньому розкладається на два співмножника. Нехай регулювання здійснюється у функції тільки частоти (працюють тільки регулятори турбін, тобто АРЧО за миттєвим відхиленням), при цьому передатна функція регулятора:
 , (4.12)
, (4.12)
де Рт - потужність, що виробляється турбіною.
Якщо здійснюється спільне регулювання частоти і перетікання потужності, то в рівняння руху (4.1) необхідно включити впливи як за частотою, так і за перетіканням. Передатну функцію регулюючого впливу за перетіканням позначимо:
 . (4.13)
. (4.13)
На рис. 4.2 наведена структурна схема об'єднаної енергосистеми з регулюванням по частоті і перетіканню потужності.
Рисунок 4.2 - Структурна схема об'єднаної енергосистеми з регулюванням частоти і перетікання потужності
У загальному випадку , знаменники виразів (4.12) і (4.13) можуть розрізнятися. Однак, оскільки регулюючі впливи і за частотою і за перетіканням діють в одному і тому же ланцюгу ланок (МКТ, турбіна і т.д.), то шляхом відповідної зміни чисельників легко зробити знаменники однаковими.
Після простих, аналогічних, що виконувалися раніше перетворень, можна також одержати характеристичний визначник. Він розкладається також на два співмножники.
Перший співмножник цього характеристичного визначника не змінився в порівнянні з попередніми співвідношеннями, тобто стійкість процесу регулювання середньої частоти виявляється не залежної від регулюючого впливу за перетіканням. Другий співмножник характеризує регулювання різниці частот регулятором за передатною функцією:
 . (4.14)
. (4.14)
Якщо ж урахувати зв'язок між різницею частот і зміною перетікання , то другий співмножник буде характеризувати регулювання перетікання регулятором з передатною функцією:
 . (4.15)
. (4.15)
Рівняння (4.14) і (4.15) порівняємо з рівняннями (4.12) і (4.13). Очевидно, що в той час як вплив за перетіканням не впливає на стійкість регулювання частоти, зворотне твердження не відповідало б дійсності, тому що в (4.15) входять оператори впливу як за перетіканням NP(p), так і за частотою Nw(p).
В нерегульованій об'єднаній енергосистемі зміна середньої частоти протікає за експоненціальним законом зі сталою часу TJ/kН, а зміна різниці частот містить дві прагнучі до нуля складові: експоненціальну і коливальну. Період коливань у більшості, випадків близький до 1 с. Регулятор частоти на них реагувати не буде, так само як регулятор потужності не реагує на коливальну складову потужності генератора (див. § 5-2 в [10]). Стала часу експоненціальної складової незначна за величиною і близька до сталої часу зміни середньої частоти. Однак на відміну від зміни середньої частоти різниця частот прагне до нуля. Таким чином, «система регулювання різниці частот» відрізняється від «системи регулювання середньої частоти» заміною інерційної ланки реальною ланкою, що диференціює, з дуже невеликим коефіцієнтом передавання. Якщо стійка друга систему, то тим більше буде стійка перша. Отже, буде стійка і у цілому система регулювання частоти в об’єднаної енергосистемі. Остаточний вивід полягає в тім, що система регулювання частоти, стійка в концентрованій енергосистемі, буде стійка і у симетричній енергосистемі з двох частин. Міркуючи так само, як у випадку рівнянь (4.9) ¸ (4.11), можна поширити цей вивід на випадок як двох нерівних по потужності частин, так, очевидно, і на випадок довільного числа частин.
Слід зазначити, що аналітичний аналіз не виявляє якої-небудь нестійкості, пов'язаної з використанням в обох частинах енергосистеми астатичного регулювання частоти за миттєвим відхиленням. Якщо характеристичне рівняння Ww(p) = 0 відповідає стійкому регулюванню в одній із частин енергосистеми, то принаймні при певних значеннях вхідних в Wc(p) параметрів буде стійким і загальний рух. Цим доводиться, що відоме в експлуатації явище нестійкості паралельної роботи астатичних регуляторів має іншу природу: воно зв'язано не зі структурою і співвідношенням параметрів системи регулювання, а з нелінійними ефектами ( розходженням величин зон нечутливості, різними коефіцієнтами підсилення при наявності зон нечутливості і нестабільністю (розбіжністю) уставок регуляторів). Відповідно і нестійкість проявляється не у вигляді розбіжних коливань або аперіодичного наростання координат, а у вигляді поступової розбіжності потужностей, що генеруються регулюючими електричними станціями, у цьому випадку - частинами енергосистеми. Отже, стійкість може бути забезпечена без зміни структури і параметрів шляхом застосування регуляторів без зони нечутливості і з високою точністю і стабільністю настроювання.
Наведене моделювання об'єднаної енергосистеми засновано на оцінці характеристик асинхронної потужності (параметрів АД, ТД). На відміну від випадку роботи генератора на шини незмінної напруги в розглянутому випадку є три незалежні змінні d12, Eq1і Eq2,тому збільшення потужності, що генерується у кожній частині об'єднаної енергосистеми, можна записати у вигляді:
Члени виду  представляють собою прирощення синхронної потужності. Члени, у які входять прирощення ЕРС Eq, щовиникають при взаємному ковзанні частин енергосистеми, відповідають асинхронній потужності.
представляють собою прирощення синхронної потужності. Члени, у які входять прирощення ЕРС Eq, щовиникають при взаємному ковзанні частин енергосистеми, відповідають асинхронній потужності.
Розрахунок перехідних характеристик системи АСРЧ і М за миттєвим відхиленням виконується для структурної схеми АСР зображеної на рис. 4.3
Рисунок 4.3 - Структурна схема регулювання частоти і перетікання потужності за миттєвим відхиленням в об'єднаній енергосистемі
На рис. 4.3 кожна з однакових частин енергосистеми приведена до одного парового турбоагрегату без проміжного перегріву. Для зручності порівняння з іншими схемами і розрахунковими випадками коефіцієнт передачі МКТ позначений окремою величиною b. Він при розрахунках приймається рівним одиниці. Сталі часу ТДВ і ТС приймаються такими ж як і в лабораторній роботі №3. Коефіцієнт синхронної потужності w0АС = 30, тобто АС » 0,1. Коефіцієнт асинхронної потужності АДзадається в кожному варіанті розрахунку. В якості збурювання розглядається східчаста зміна навантаження DРН в одній із частин енергосистеми. За одиницю прийнята потужність однієї частини об'єднаної енергосистеми.
4.2 Завдання
1. Скласти структурну схему моделювання системи регулювання частоти і перетікання потужності за миттєвим відхиленням за допомогою програми IMDS.
2. Скласти текст програми для розрахунку системи регулювання частоти і перетікання потужності з урахуванням симетричності обох частин об'єднаної енергосистеми і вихідних даних, наведених у табл. 4.1.
3. Виконати розрахунок на ЕОМ перехідних характеристик Dw1(t), Dw2(t) і Рп(t) нерегульовані об'єднані енергосистеми при g1=g2=0, kп1= kп2=0, w0Ад=1 і при східчастій зміні тільки DРн1 (DРн2=0). Регулювання в цьому випадку здійснюється статичним регулятором частоти обертання АРЧО. Сталі значення відхилення частоти і перетікання потужності визначаються за співвідношеннями:
 и.
и. 
За допомогою перехідних характеристик визначити сталі значення Dw1(t), Dw2(t) і Рп(t) і зрівняти їх з результатами розраховані за зазначеними співвідношеннями.
4. Розрахувати на ЕОМ перехідні характеристики об'єднаної енергосистеми, коли регулювання частоти здійснюється тільки в першій її частині (g1=8 і g2=0, kп1= kп1=0) при східчастому прирощені потужності в другій частині DРн2 ( при цьому DРн1=0).
Визначити при якому значенні коефіцієнта асинхронної потужності зникає коливальна складова перехідного процесу в першій і другій частинах об'єднаної енергосистеми Dw1(t), Dw2(t). Рекомендується змінювати w0Ад від 0 до
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|