- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
АНАЛІЗ ПЕРЕХІДНИХ ПРОЦЕСІВ ПРИ РЕГУЛЮВАННІ 1 страница
ПЕРЕЛІК СКОРОЧЕНЬ
АРЗ – автоматичний регулятор збудження електромагнитний.
АРЗ СД – автоматичний регулятор збудження сильної дії електромагнітний.
АРЗ СДН – автоматичний регулятор сильної дії напівпровідниковий.
АРЗ СДЦ – автоматичний регулятор сильної дії цифровий.
АРЗ СДМ – автоматичний регулятор сильної дії мікропроцесорний.
АСР – автоматична система регулювання.
АРЧО – автоматичний регулятор частоти обертання.
АРЧ і П – автоматичний регулятор частоти і потужності.
АСРЧО – автоматична система регулювання частоти обертання.
АСРЧ і П - автоматична система регулювання частоти і потужності.
ГЗЗ – гнучкий зворотний зв'язок.
ГЕС – гідроелектростанція.
ДР – дугогасний реактор.
ДСТУ – державний стандарт України.
ЕОМ – електронна обчислювальна машина.
ЕЕС – електроенергетична система.
ЖЗЗ – жорсткий зворотний зв’язок.
МКТ – механізм керування турбіною.
ОЕС – об’єднана енергетична система.
ФД – фазовий детектор.
ХВП – характеристика відносного приросту палива.
ЦАП – цифро – аналоговий перетворювач.
IMDS – програма для імітаційного моделювання динамічних систем.
TV – вимірювальний трансформатор напруги
Лабораторна робота 1
АНАЛІЗ СТІЙКОСТІ І ЯКОСТІ АВТОМАТИЧНОЇ
СИСТЕМИ РЕГУЛЮВАННЯ НАПРУГИ ГЕНЕРАТОРА
Мета роботи - аналіз стійкості і показників якості автоматичної системи регулювання напруги генератора при різних способах корекції.
1.1 Основні відомості
Розрахунок динаміки процесу регулювання напруги генератора в загальному випадку э складною задачею, вирішення якої залежить від багатьох факторів: структури схеми регулювання, динамічних і статичних характеристик окремих елементів, режиму роботи генератора. Вимоги до точності математичного опису динамічних характеристик автоматичної системи регулювання (АСР) напруги генератора істотно залежать від призначення розрахунку.
Для оцінки динамічних властивостей АСР напруги генератора в ряді випадків достатнім є наближений аналіз стійкості регулювання напруги на виводах статора в режимі холостого ходу, тому що холостий хід генератора, що працює ізольовано, режим найбільш важкий відносно стійкості регулювання [1].
На рис. 1.1 наведена функціональна схема АСР напруги генератора з електромашинним збудником і автоматичним регулятором збудження (АРЗ) пропорційної дії. Останній містить у собі вимірювальний орган напруги ИОН і магнітний підсилювач АL. На вхід АРЗ надходить інформація про запропоноване (задане) значення регульованої напруги Uпр і по ланцюгу головного від’ємного зворотного зв'язку – про поточне значення регульованої напруги U. У вимірювальному органі регулятораці напруги порівнюються і виявляються величина і знак неузгодженості UDU=Uпр-U. Напруга UDU підсилюється і перетворюється в регулюючий вплив регулятора Uy, що надходить на обмотку збудження LE електромашинного збудника GE. У результаті змінюються струм збудження IВ, і напруга UГ генератора G.
Аналіз проводиться при наступних допущеннях: структурна схема системи спрощена; рівняння руху ланок системи лінійні (лінеарізованні); частота обертання ротора генератора стала.
Структурна схема лінеарізованної АСР напруги генератора показана на рис. 1.2,а. Вимірювальний орган напруги ИОН представлений у вигляді суматора і пропорційної ланки з коефіцієнтом передачі kU. Генератор, збудник і підсилювач АРЗ вводяться в структурну схему як інерційні ланки першого порядку з передатними функціями:

де kг, kв, ky - коефіцієнти передачі на лінійній ділянці відповідно генератора, збудника і підсилювача АРЗ;
Tdo, Te, Ty - сталі часу відповідно обмотки збудження генератора при розімкненій обмотці статора, обмотки збудження збудника і підсилювача АРЗ.
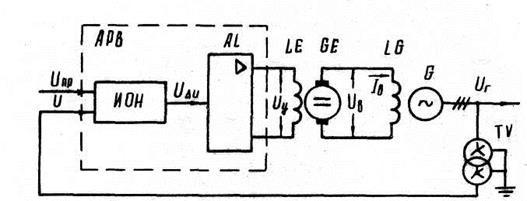
 Рисунок 1.1 – Функціональна схема АСР напруги генератора
Рисунок 1.1 – Функціональна схема АСР напруги генератора
Рисунок 1.2 - Структурна схема АСР напруги генератора:
а - з П–регулятором; б - з П–регулятором і місцевим від’ємним ГЗЗ;
в - з ПД-регулятором.
Коефіцієнт передачі вимірювального трансформатора напруги визначається за співвідношенням:
 , (1.1)
, (1.1)
де Uт.ном - номінальна напруга вторинної обмотки трансформатора напруги, дорівнює 220 В;
Uг.ном- номінальна напруга генератора (у табл. 1.1 задано у кВ).
Умова стійкості замкненої АСР напруги генератора можна знайтиза допомогою критерію Гурвіца. Для цього складемо передатну функцію замкненої системи за відхиленням:
 ,
,
де kраз - коефіцієнт передачі розімкненої АСР kраз=kU×ky×kг×kв×kт . (1.2)
Характеристичне рівняння системи:
(Tdo×p+1)(Te×p+1)(Ty×p+1)+kраз=0.
Перетворимо це рівняння до виду:
a0×p3+a1×p2+a2×p+a3=0,
де
a0=TyTdoTe; a1=TyTe+TeTdo+TyTdo; a2= Ty+Tdo+Te; a3=1+kраз,
Розв’язуючи визначник Гурвіца другого порядку:
 = a1×a2 - a0×a3>0,
= a1×a2 - a0×a3>0,
відносно kраз отримаємо таку умову АСР стійкості:
 . (1.3)
. (1.3)
Умова стійкості замкнутої АСР обмежує припустимий коефіцієнт передачі, від якого залежить її коефіцієнт статизму (відносна статична похибка) [1,2]:
kст=e(  )/DUпр = 1/(kраз+1),
)/DUпр = 1/(kраз+1),
де e( )=DUпр - DU( ) - стала похибка регулювання поканалу впливу, що задає.
З аналізу умови (1.3) витікає, що при швидкодіючому тиристорному збуднику (Te<<Tdo) з безінерційним регулятором (Ty<<Tdo) система регулювання буде мати аперіодичний перехідний процес при досить великому коефіцієнті kраз, тобто при малому коефіцієнті статизму kст.
На синхронних генераторах з електромашинними збудниками в якості АРЗ застосовуються пристрої струмового компаундувания з електромагнітним коректором напруги, який виконаний на магнітному підсилювачі AL (рис. 1.1). У цьому випадку стала часу Ty підсилювача буде порівнянної з Te (табл. 1.1) і для стійкого регулювання напруги при відносно невисокому статизмі (kст=2¸4%) необхідно застосування корекції АСР [3].
Одним зі способів корекції є введення від’ємного гнучкого зворотного зв'язка (ГЗЗ), що охоплює збудник і підсилювач автоматичної системи регулювання (рис. 1.2,б). ГЗЗ звичайно виконується у вигляді трансформатора, що диференціює (ДТ), первинна обмотка якого підключається на напругу якоря збудника, а вторинна – до однієї з керуючих обмоток магнітного підсилювача [3]. Передатна функція ДТ:
 . (1.4)
. (1.4)
Розглянемо вплив від’ємного ГЗЗ на процес регулювання. При Тдт=0 одержимо ідеальнуланку, що диференціює. Тоді передатна функція еквівалентної ланки, що представляє магнітний підсилювач, збудник і ДТ, буде мати вигляд:

Нехтуючи першим членом у знаменнику, що не вносить істотної похибки, одержимо:
 .
.
Система регулювання перетворюється в систему другого порядку (складається із двох інерційних ланок першого порядку WГ(р) і WЭК(р)), що стійка при будь-якому коефіцієнті передачі. Однак у цьому випадку вповільнюється процес регулювання. Для підвищення стійкості при одночасному поліпшенні якості процесу регулювання можна також використовувати швидкодіючі коректори [3].
Другий спосіб корекції АСР напруги генератора – включення ланки, що диференціює, паралельно ИОН (рис. 1.2, в). При цьому П-регулятор перетворюється в ПД-регулятор. Користуючись критерієм Гурвіца, можна показати, що ця корекція дозволяє підвищити коефіцієнт передачі у відношенні [2]:
 , (1.5)
, (1.5)
де kраз к - коефіцієнт передачі скоректованої АСР;
k1U - коефіцієнт передачі ланки, що диференціює.
Максимально припустиме значення k1U обмежується вимогою невід’ємності знаменника. Розглянутий спосіб підвищує швидкодію АСР, але знижує можливість щодо підвищення kраз.
Дослідження АСР напруги генератора проводиться за допомогою прикладної програми IMDS, що розроблена на кафедрі АТ ДонНТУ (див. додатки А і Б).
1.2 Порядок виконання роботи
1. Використовуючи вихідні дані табл. 1.1, за умовою стійкості (1.3) розрахувати граничний коефіцієнт передачі kраз. З співвідношення (1.2) визначити граничний коефіцієнт підсилення ky АРЗ. Коефіцієнт передачі kТ розраховується за співвідношенням (1.1). Для одержання запасу стійкості АСР необхідно зменшити kу до такої величини, щоб коефіцієнт статизма kст, розрахований за формулою (1.4), не перевищував 2 ¸ 4 %.
3. За допомогою рис. 1.2 скласти структурні схеми моделювання АСР за допомогою пакета IMDS і тексти програм у вигляді таблиці (див. додаток Б). Прийняти вплив, що задає DUпр=10 В.
2. Виконати розрахунок АСР з П-регулятором при kу граничним за умовою стійкості. Змінюючи kу, домогтися повільно загасаючого характеру перехідного процесу при коефіцієнті статизма kст ≤ 2 ¸ 4 %. У результаті розрахунку АСР на ЕОМ підібрати значення kу, при якому перехідна характеристика АСР буде мати не більше трьох переходів через стале значення.
3. Дослідити ефективність розглянутих способів корекції для забезпечення необхідної якості процесу регулювання. При цьому необхідно визначити оптимальне значення коефіцієнта передачі kДТ і k1U за показниками якості регулювання. Потім виконати розрахунок перехідних характеристик при значеннях kДТ і k1U , що відрізняються від значення прийнятого за оптимального на ±(20% ¸ 30%). Таким чином, рішення завдання зводиться до визначення необхідних коефіцієнтів передачі коригувальних ланок kДТ і k1U, (ТДТ прийняти рівним 0,01¸0,02 с). Рекомендується kДТ змінювати в межах 1 ¸ 10. Коефіцієнт передачі k1U розраховується за виразом (1.5) при різних значеннях відносини kраз.к/kраз. Попередньо це відношення можна прийняти рівним 2. При незадовільній якості регулювання k1U потрібно збільшити.
4. За результатами моделювання на ЕОМ побудувати перехідні характеристики DU(t) або UDU(t) і для них визначити показники якості регулювання (час регулювання tрег, перерегулювання s, коливальність N і сталу помилку e(¥)).
5. Для надійної роботи програми IMDS корекцію АСР у вигляді ідеального ланки, що диференціює, W(P)=k1UР (рис. 1.2, б) варто замінити на реальне з передатною функцією:
 ,
,
тому що при малих значеннях Т1U(0,01...0,02 с) реальна ланка, що диференціює, наближається до ідеальної ланки. Крок інтегрування при розрахунку АСР, що скоректовані, потрібно прийняти 10-4 с і в деяких випадках - 10-5 с.
1.3 Зміст звіту
1. Мета роботи.
2. Вихідні дані.
3. Функціональна і структурна схеми АСР напруги генератора.
4. Розрахунок параметрів ланок АСР і коригувальних ланок.
5. Структурна схема моделювання за допомогою пакета IMDS.
6. Програма розрахунку.
7. Перехідні характеристики і показники якості АСР при різних умовах.
8. Аналіз отриманих результатів.
Таблиця 1.1 - Вихідні дані для дослідження АСР напруги генератора.
| Номер варіанта | Генератор | Збудник | Регулятор | |||
| Uн, кВ | Кг | Tdo, c | Kв | Те, с | Ту, с | |
| 1, 11 | 10,5 | 37,5 | 6,1 | 1,4 | 0,55 | 0,38 |
| 2, 12 | 10,5 | 28,4 | 6,5 | 1,85 | 0,45 | 0,42 |
| 3, 13 | 15,75 | 34,2 | 6,8 | 1,9 | 0,5 | 0,32 |
| 4, 14 | 18,0 | 60,0 | 5,0 | 1,4 | 0,35 | 0,42 |
| 5, 15 | 20,0 | 35,7 | 5,9 | 2,3 | 0,3 | 0,38 |
| 6, 16 | 15,75 | 37,5 | 6,4 | 1,75 | 0,42 | 0,35 |
| 7, 17 | 11,8 | 27,5 | 7,1 | 1,6 | 0,38 | 0,40 |
| 8, 18 | 13,8 | 44,5 | 8,5 | 1,4 | 0,48 | 0,31 |
| 9, 19 | 6,3 | 25,2 | 9,9 | 1,2 | 0,75 | 0,50 |
| 10, 20 | 6,3 | 28,6 | 6,5 | 1,4 | 0,53 | 0,45 |
Примітка до табл. 1.1: для варіантів 1¸10 прийняти kU= 1, а для варіантів 11¸20 - kU =1,2 і Тdo на 0,5 c менше.
1.4 Контрольні питання
1. Які задачі покладають на систему автоматичного регулювання збудження синхронних генераторів?
2. Які впливи, що збурюють, впливають на систему АРЗ?
3. Які є типи систем збудження синхронних генераторів?
4. Перелічите основні елементи і їхнє призначення відповідного типу системи збудження.
5. Як моделюється об'єкт регулювання в АСР напруги генератора?
6. Які типи пристроїв компаундування застосовуються в АСР напруги генератора?
7. Поясніть принцип роботи ИОН на основі трансформатора, що насичується.
8. Запишіть в операторній або в диференціальній формі закон регулювання збудження синхронного генератора сильної дії.
9. Які способи корекції застосовуються для поліпшення якості АСР напруги синхронного генератора?
10. Принципи роботи вимірювальних органів напруги і частоти АРЗ СД, АРЗ СДН, АРЗ СДЦ, АРЗ СДМ.
Лабораторна робота 2
ДОСЛІДЖЕННЯ АВТОМАТИЧНОЇ СИСТЕМИ
РЕГУЛЮВАННЯ ДУГОГАСНОГО РЕАКТОРА
Мета роботи - дослідження перехідних процесів в автоматичній системі регулювання дугогасного реактора і вибір оптимального коефіцієнта підсилення регулятора за умовою забезпечення необхідної якості регулювання.
2.1 Основні відомості
В електричних мережах напругою 6, 10, 35 кВ переважним видом пошкодження є однофазні замикання на землю, що складають приблизно 75% від загальної кількості пошкоджень. Ефективним засобом запобігань аварійних наслідків таких замикань є компенсація ємнісного струму за допомогою дугогасного реактора (ДР). Для компенсації ємнісного струму широко застосовуються реактори плунжерного типу РЗДПОМ [4, 5] і з підмагнічуванням типу РОУМ і РЗДУОМ . У плунжерних реакторах плавне регулювання індуктивності забезпечується за рахунок зміни повітряного зазору між рухливими частинами магнітопроводу (плунжерами). Повітряний зазор регулюється електроприводом з відповідною кінематичною схемою. У реакторах типу РУОМ і РЗДУОМ плавне регулювання індуктивності забезпечується шляхом зміни підмагнічування магнітопроводу.
Для безперервної підтримки резонансного настроювання ДР при змінах ємності мережі застосовуються автоматичні регулятори. Найбільш простими і надійними в експлуатації є фазові регулятори [5, 6] принцип роботи яких у нормальному режимі мережі заснований на вимірі кута між векторами напруги нейтралі UЗ0 і опорною напругою UОП (одна з лінійних напруг мережі). Напруга UЗ0 створюється штучно підключенням конденсатора DС невеликої ємності до однієї з фаз мережі і землі або введенням у її нейтраль напруги від джерела промислової частоти. Ємність конденсатора DС вибираєтьсяз такої умови, щоб напруга зсуву нейтралі при резонансному настроюванні ДР не перевищувало 0,15 фазного [7]. Досвід експлуатації регуляторів показує, що в мережах напругою 6, 10, 35 кВ з ємнісними струмами замикання на землю IC = 10¸100 А ємність DС = 0,1¸0,8 мкФ.
На рис. 2.1 показане положення вектора U30 щодо векторів напруг джерела при включенні конденсатора DС між фазою А і землею.
Рисунок 2.1 - Векторна діаграма напруг мережі
При резонансному настроюванні ДР вектор UЗ0.рез розташовується під кутом 90° щодо напруги цієї фази і збігається по напрямку з лінійною напругою UСВ, що вибирається в якості опорної. Кут між напругами UЗ0 і UОП від ступеня розстройки компенсації n визначається виразом:
 , (2.1)
, (2.1)
де d - коефіцієнт заспокоєння (добротності) компенсованої мережі, обумовлений активними втратами в ізоляції мережі і у реакторі.
Для кабельних мереж коефіцієнт d становить 0,03 ¸ 0,1. Максимальне значення d мають мережі з низьким рівнем ізоляції.
Ступінь настройки компенсації визначається співвідношенням:
 , (2.2)
, (2.2)
де IL - індуктивний струм реактора.
При IC>IL (n>0) має місце недокомпенсація, а при IC<IL (n<0) – перекомпенсация. При резонансному настроюванні має місце IC=IL (n=0).
Автоматична система регулювання дугогасного реактора (АСР ДР) повинна задовольняти наступним вимогам. Похибка настроювання компенсації повинна бути не більше ±5%, причому реактивний залишковий струм замикання на землю не повинен перевищувати 5А [7]. Коливальність перехідного процесу повинна бути мінімальною, тому що коливання в АСР приводять до швидкого зношування механізму зміни повітряного зазору реактора. Час відпрацьовування всього діапазону регулювання струму ДР у нормальному режимі мережі не грає істотної ролі. З технологічних міркувань може бути прийнято порядку декількох хвилин. Виникнення однофазного замикання на землі за цей час малоймовірно. Слід зазначити, що час регулювання діапазону робочого струму ДР плунжерного типу відносно невелике і становить 0,5 ¸ 2 хв. Для реактора з підмагнічуванням цей час становить 1 ¸ 5 с.
Похибка настроювання компенсації залежить від величини несиметрії фазних провідностей щодо землі, а також від конструкції і параметрів реактора. У кабельних мережах ця несиметрія незначна і нею можна знехтувати.
Розглянемо вплив інерційності реактора на похибку настроювання компенсації, використовуючи залежності j= f( IР, IС,n), що наведені на рис. 2.2, де jср1 і jср2 - фази напруги нейтралі, при яких відбувається спрацьовування релейного елемента регулятора; ±Dn - настройка компенсації, що відповідає уставці регулятора.
 |
Рисунок 2.2 – Залежності фази напруги нейтралі від струму реактора
і ступеня настройки компенсації
Припустимо, що реактор попередньо був настроєний у резонанс при IP2=IC=50А (точка 2) і ємнісний струм мережі не змінюється. Точкам 1 і 3 відповідає настройка компенсації ±Dn, при якій спрацьовує релейний елемент регулятора. Проміжок між цими точками 2×Dn (  ) при d=0,03 є зоною нечутливості регулятора.
) при d=0,03 є зоною нечутливості регулятора.
Керуючи реактором дистанційно, установимо струм, що відповідає точці 4, а потім включимо автоматичний регулятор. При коефіцієнті повернення релейного елемента, рівному одиниці, і відсутності інерційних елементів у схемі регулятора відключення електродвигуна привода ДР відбудеться в точці 3. Подальша зміна струму реактора DIР визначається його інерційністю. Якщо після відключення двигуна струм реактора зміниться на величину  , то система вернеться у вихідний стан і струм реактора буде
, то система вернеться у вихідний стан і струм реактора буде  .
.
За умови  може також мати місце
може також мати місце  або
або  . Струм реактора відрізняється від резонансного значення, однак не виходить за межі зони нечутливості. У випадку
. Струм реактора відрізняється від резонансного значення, однак не виходить за межі зони нечутливості. У випадку  система компенсації буде перебувати у автоколивальному режимі. Автоколивальність можна усунути шляхом зменшення інерційності реактора. При цьому зменшується величина
система компенсації буде перебувати у автоколивальному режимі. Автоколивальність можна усунути шляхом зменшення інерційності реактора. При цьому зменшується величина  , що дозволяє при тій же зоні нечутливості (вона залежить від коефіцієнта підсилення регулятора і коефіцієнта добротності мережі) одержати умову
, що дозволяє при тій же зоні нечутливості (вона залежить від коефіцієнта підсилення регулятора і коефіцієнта добротності мережі) одержати умову  , що відповідає стійкої АСР ДР.
, що відповідає стійкої АСР ДР.
У процесі експлуатації опір ізоляції мережі знижується, що приводить до підвищення коефіцієнта d. При цьому крутизна фазової характеристики падає, і Похибка компенсації збільшується (на рис. 2.2 точки 5 і 6 на кривій, що відповідає d=0, 05) за рахунок збільшення ширини зони нечутливості. При цьому можна також отримати умову стійкості .
На рис. 2.3,а наведена функціональна схема АСР ДР.
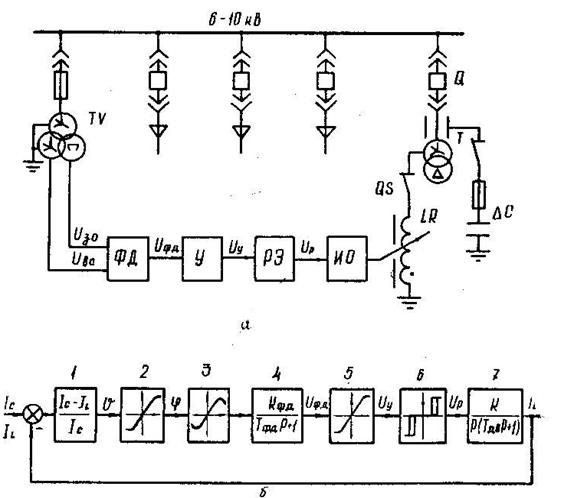
Рисунок 2.3 - Автоматична система регулювання дугогасного реактора:
а - функціональна схема; б - структурна схема
У якості вимірювального органу у регуляторі використовується фазовий детектор ФД, на вхід якого від трансформатора ТV подається напруга зсуву нейтралі  і лінійна напруга мережі
і лінійна напруга мережі  . При відхиленні настройки ДР від резонансу на виході ФД виникає напруга постійного струму
. При відхиленні настройки ДР від резонансу на виході ФД виникає напруга постійного струму  , знак якого визначається режимом компенсації (перекомпенсацією або недокомпенсацією), а величина - ступенем настройки компенсації. Це напруга після посилення в підсилювачі У подається на релейний елемент РЭ, який після спрацьовування включає виконавчий орган ИО. Останній змінює індуктивність дугогасного реактора LR у напрямку досягнення резонансу.
, знак якого визначається режимом компенсації (перекомпенсацією або недокомпенсацією), а величина - ступенем настройки компенсації. Це напруга після посилення в підсилювачі У подається на релейний елемент РЭ, який після спрацьовування включає виконавчий орган ИО. Останній змінює індуктивність дугогасного реактора LR у напрямку досягнення резонансу.
Настроювання ДР у резонанс із ємністю мережі, як відзначалося раніше, закінчується з деякою похибкою. Підбором коефіцієнта передачі підсилювача У при заданих параметрах мережі і інших елементів системи регулювання можна забезпечити резонансне настроювання ДР з мінімальною похибкою (1 ¸ 2%).
Для оцінки впливу інерційності привода і коефіцієнта добротності мережі на показники якості регулювання потрібно одержати перехідні характеристики АСР ДР у різних умовах, тобто розрахувати перехідний процес на ЕОМ.
Регулятор системи, що досліджується, містить нелінійні елементи, наприклад, підсилювач із насиченням і релейний елемент. У даній роботі використовується для розрахунку перехідних характеристик прикладна програма IMDS (імітаційне моделювання динамічних систем), що дозволяє досліджувати перехідні процеси в АСР, що задається структурною схемою з передатними функціями ланок (див. додатки А и Б). Ця програма дозволяє моделювати зазначені вище нелінійні елементи регулятора.
Ланки АСР ДР представлені наступними передатними функціями і нелінійними статичними характеристиками (рис. 2.3, б).
Ланки 1 і 2 - електрична мережа. Лінійна ланка 1 визначає залежність (2.2), а нелінійна ланка 2 (фазова характеристика компенсованої мережі) - залежність (2.1). Стала часу мережі на порядок менше, ніж стала часу ИО реактора, тому нею нехтуемо.
Ланки 3 і 4 - вимірювальний елемент регулятора (фазовий детектор). Виконаний він у вигляді діодної схеми порівняння фаз [8]. Напруга на його виході є косинусоїдальна функція кута j:
 ,
,
де Е - ЕРС на вході фазового детектора, пропорційна опорній напрузі;
 - коефіцієнт перетворення схеми детектора.
- коефіцієнт перетворення схеми детектора.
При j = 0, що згідно виразу (2.1) відповідає резонансному настроюванню реактора, напруга на виході ФД має максимальне значення. У той же час для правильної роботи регулятора ця напруга повинне бути дорівнювати нулю. Із цією метою на вході ФД вмикається фазовий коректор (на схемі рис. 2.3,а не показаний), за допомогою якого створюється постійний зсув фази опорної напруги на кут 90°. У цьому випадку напруга на виході ФД буде дорівнювати:
 , (2.3)
, (2.3)
де  - коефіцієнт передачі фазового детектора.
- коефіцієнт передачі фазового детектора.
Наведена залежність без врахування  реалізована ланкою 3. На виході ФД включений RC- фільтр, що згладжує, тому у динамічному відношенні він розглядається як аперіодична ланка з передатною функцією:
реалізована ланкою 3. На виході ФД включений RC- фільтр, що згладжує, тому у динамічному відношенні він розглядається як аперіодична ланка з передатною функцією:
 ,
,
де  - стала часу RC -фільтра..
- стала часу RC -фільтра..
Ланка 5 - підсилювач. Представлений він статичною характеристикою із зоною насичення. Напруга, при якої наступає насичення підсилювача, становить: ±25 В.
Ланка 6 - релейний елемент з зоною нечутливості. Ланка має наступні параметри: напруга спрацьовування 24 В; напруга відпадіння 22 В.
Ланка 7 - дугогасний реактор з приводом. Структурна схема реактора наведена на рис. 2.4.
Двигун Редуктор Реактор
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|