- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
АНАЛІЗ ПЕРЕХІДНИХ ПРОЦЕСІВ ПРИ РЕГУЛЮВАННІ 2 страница

Рисунок 2.4 - Структурна схема плунжерного дугогасного реактора
Ланка 7 містить у собі відповідно до рис. 2.4 наступні елементи.
Електродвигун з передатною функцією:
 ,
,
де  -коефіцієнт передачі двигуна, приймається рівним 0,4
-коефіцієнт передачі двигуна, приймається рівним 0,4  ,
,
 - стала часу двигуна.
- стала часу двигуна.
Редуктор (без люфтів):
 .
.
Дугогасний реактор:
 .
.
Вихідні координати ланок привода ДР:
 - кут повороту валу двигуна;
- кут повороту валу двигуна;
 - лінійне переміщення плунжера ДР.
- лінійне переміщення плунжера ДР.
У структурній схемі ДР з приводом представляється передатною функцією:
 ,
,
де  . (2.4)
. (2.4)
В (2.4) напруга на виході реле  = 380 В. Віднесена вона до двигуна привода реактора. У цьому випадку напруга на виході релейного елемента приймається рівною UP=±1 В. Коефіцієнт передачі K чисельно дорівнює швидкості зміни індуктивного струму плунжерного реактора в А/с.
= 380 В. Віднесена вона до двигуна привода реактора. У цьому випадку напруга на виході релейного елемента приймається рівною UP=±1 В. Коефіцієнт передачі K чисельно дорівнює швидкості зміни індуктивного струму плунжерного реактора в А/с.
Ланка 7 може моделювати дугогасний реактор з підмагнічуванням. Структурна схема системи керування таким реактором наведена на рис. 2.5 [9].
Рисунок 2.5 - Структурна схема системи керування дугогасним реактором
Схема на рис. 2.5 складається з виконавчого органа (ИО) 1 і дугогасного реактора (ДР) у вигляді двох блоків: інерційної ланки першого порядку зі змінною постійною часу 2, функціональної нелінійної ланки 3, що визначає залежність індуктивного струму реактора Jдр від значення струму керування iу і напруги зсуву нейтралі U0. Тиристорний випрямляч виконаний за трифазною мостовою схемою з нульовим виводом. Середнє значення струму, що випрямлений, Jу залежить від кута керування тиристорами.
Структурна схема виконавчого органа наведена на рис. 2.6.
 |
На вхід реверсивного лічильника 1 у процесі регулювання надходять сигнали про перекомпенсацію Uп або про недокомпенсацію Uн. При цьому лічильник відповідно буде зменшувати або збільшувати цифровий код на виході. Цифро – аналоговий перетворювач перетворює цей цифровий код у напругу керування Uy. Напруга Uy надходить на блок керування тиристорів 3. Залежно від величини напруги керування змінюється кут відкривання тиристорів випрямляча 3. На його виході залежно від Uy і навантаження з'являється відповідний струм Jу. При моделюванні на ЕОМ лічильник і ЦАП представляється інтегруючою ланкою з коефіцієнтом передачі КЦАП. Керований випрямляч працює в режимі неперервних струмів. У цьому режимі середнє значення струму Jу - функція косинуса кута відкривання тиристорів, тому характеристика Jу = f(Uу) практично лінійна. Таким чином, тиристорний випрямляч можна представити пропорційною ланкою з коефіцієнтом передачі КТВ. Отже, структурну модель виконавчого органа можна представити схемою, що наведена рис. 2.7.
Інерційність дугогасного реактора визначається ланкою 2 на рис. 2.5. У зв'язку з тим, що стала часу даної ланки залежить від струму Jy, то необхідно моделювати його на ЕОМ шляхом розв'язання диференціального рівняння, що відповідає інерційній ланці першого порядку:
 , (2.5)
, (2.5)
де tДР – стала часу обмотки управління реактора.
З (2.5) визначимо похідну струму:
 .
.
Виконаємо інтегрування обох частин отриманого виразу:
 (2.6)
(2.6)
Структурна схема моделювання дугогасного реактора з підмагнічуванням при урахуванні рівняння (2.5) наведена на рис. 2.8.
 |
Як приклад на рис. 2.9 наведені характеристики реактора типу РЗДУОМ
а
б
Рисунок 2.9 - Характеристики дугогасного реактора типу РЗДУОМ:
а - стала часу, б - коефіцієнт передачі
Залежність tДР(Jy) апроксимується за допомогою двох відрізків прямих відповідно до функції:
 (2.7)
(2.7)
В (2.7) струм Jп визначає точку з'єднання відрізків прямих. Коефіцієнти k1, k2 задають нахил відрізків прямих, а змінні tmax1 і tmax2 значення сталої часу при струмі керування рівному нулю.
 |
На рис. 2.10 наведений результат розрахунку сталої часу на Mathcad при tmax1=8,0 c; tmax2= 1.8 c; k1=0.25; k2=0,0074; Jп=25,38 A.
Рисунок 2.10 - Стала часу обмотки керування дугогасного реактора
Відрізки прямих за допомогою програми IMDS реалізуються за допомогою схеми, що складається із суматора, блоків «константа» і «підсилювач».
Функціональна залежність JДР(iy,Uo) визначається наступним співвідношенням:
 , (2.8)
, (2.8)
 |
де Jomax – струм реактора при iy=0 b Uo=Uф мережі, Ku=Uo/Uф – відносна напруга зрушення нейтралі, Кх – крутизна характеристики Jдр=f( iy). Результати розрахунку на Mathcad залежності JДР(iy,Uo) при Jomax=10A (відповідає Uo=6 кВ), Ku=0.9, Kp=6 , Kx=16 наведені на рис. 2.11.
Рисунок 2.11 – Функціональна залежність JДР(iy, U0)
2.2 Порядок виконання роботи
1. За вихідним даними (табл. 2.1), користуючись формулами (2.1) і (2.3), розрахувати Uфд, а потім коефіцієнт підсилення підсилювача з умови спрацьовування релейного елемента при  n= ±0,02 і мінімальному значенні dmin.
n= ±0,02 і мінімальному значенні dmin.
2. За формулою (2.4) розрахувати коефіцієнт передачі плунжерного дугогасного реактора.
3. Визначити час t необхідний для зміни струму плунжерного реактора від нуля до значення IC. Час розрахунку на ЕОМ попередньо прийняти рівним 2×t.
4. При складанні моделі ДР із підмагнічуванням за допомогою програми IMDS скористатися структурною схемою на рис. 2.8, співвідношеннями (2.7) і (2.8), даними табл. 2.2 і табл. 2.3. Прийняти коефіцієнти передачі КЦАП = КТВ = 1.
5. Скласти структурну схему моделювання за допомогою програми IMDS. Потім у відповідності зі схемою моделювання скласти текст програми (блоки програми IMDS наведені в додатку А).
6. У результаті моделювання на ЕОМ за отриманим даними побудувати перехідні характеристики n(t) або IL(t) визначити показники якості регулювання (час регулювання і похибку настроювання ДР).
7. Якщо в АСР з шириною зони нечутливості n= ±0,02 при dmin коливання будуть відсутні, розглянути можливість зменшення похибки регулювання (збільшити коефіцієнта передачі підсилювача). У подальших дослідженнях коефіцієнт передачі підсилювача прийняти відповідний моменту виникнення нестійкості системи регулювання.
8. Дослідити вплив інерційності привода плунжерної ДР на похибку настроювання компенсації (для цього зменшити постійну часу ТДВ у 2 рази при dmin).
9. Оцінити похибка настроювання компенсації при максимальному значенні коефіцієнта dmax .
10. Вплив інерційності реактора з підмагнічуванням оцінюється при двох значеннях ємнісного струму мережі: Jс<Jп і Jс>Jп при d=dmin. Оцінка впливу коефіцієнта добротності мережі на стійкість АСР ДР виконується також як і в п. 9.
2.3 Зміст звіту
1. Мета роботи.
2. Вихідні дані.
3. Функціональна і структурна схеми АСР ДР.
4. Розрахунок параметрів ланок АСР.
5. Структурна схема моделювання за допомогою пакета IMDS.
6. Програма розрахунку.
7. Перехідні характеристики АСР.
8. Розрахунок показників якості.
9. Аналіз отриманих результатів,
Таблиця 2.1 - Вихідні дані для дослідження АСР з плунжерної ДР
| Номер варіанта | Мережа | Фазовий детектор | Реактор із приводом | ||||
| IС, А | dmin/ dmax, в.о. | КФД, В/в.о. | ТФД, с | КР× 10-3см/рад | КДР , А/см | ТДВ , с | |
| 1,11 | 0,03/0,05 | 2,0 | 0,22 | 0,82 | 0,8 | ||
| 2,12 | 0,04/0,06 | 2,5 | 0,26 | 1,65 | 0,7 | ||
| 3,13 | 0,05/0,08 | 2,6 | 0,27 | 0,55 | 1,0 | ||
| 4,14 | 0.05/0,07 | 2,8 | 0,18 | 1,1 | 0,6 | ||
| 5,15 | 0,03/0,06 | 2,5 | 0,24 | 2,2 | 0,9 | ||
| 6,16 | 0,05/0,08 | 2,6 | 0,15 | 2,2 | 0,8 | ||
| 7,17 | 0,05/0,09 | 2,8 | 0,28 | 0,82 | 0,7 | ||
| 8,18 | 0,05/0,08 | 2,4 | 0,25 | 1,65 | 0,5 | ||
| 9,19 | 0,04/0,07 | 2,7 | 0,2 | 0,82 | 0,8 | ||
| 10,20 | 0,05/0,08 | 3,0 | 0,16 | 1,3 | 0,6 | ||
Примітка: у табл.2.1 для варіантів 11 ¸ 20 прийняти ТФД на 0,04 менше.
Таблиця 2.2- Данні для розрахунку залежності tДР(Jy)
| № n/n | tmax1, c | k1 | tmax2, с | k2 | Iп, A |
| 1, 11 | 8,0 | 0,25 | 1,8 | 0,074 | 25,38 |
| 2, 12 | 7,5 | 0,25 | 1,3 | 0,074 | 25,38 |
| 3, 13 | 7,0 | 0,23 | 1,4 | 0,074 | 25,38 |
| 4, 14 | 6,5 | 0,244 | 1,2 | 0,074 | 25,38 |
| 5, 15 | 6,0 | 0,2 | 1,1 | 0,074 | 25,38 |
| 6, 16 | 5,5 | 0,18 | 1,1 | 0,074 | 25,38 |
| 7, 17 | 5,0 | 0,17 | 0,9 | 0,074 | 25,38 |
| 8, 18 | 4.5 | 0,155 | 0,8 | 0,074 | 25,38 |
| 9,19 | 4,o | 0,137 | 0,7 | 0,074 | 25,38 |
| 10, 20 | 3,5 | 0,12 | 0,65 | 0,074 | 25,38 |
Таблиця 2.3 - Ємнісний струм мережі і дані для залежності JДР(iy, U0)
| № n/n | Ic, A | Jomax, A | Ku ( №1-№10) | Ku ( №11-№20) | Kp | Kx |
| 1, 11 | 0,4 | 0,6 | ||||
| 2, 12 | 0,4 | 0,6 | ||||
| 3, 13 | 0,4 | 0,6 | ||||
| 4, 14 | 0,4 | 0,6 | ||||
| 5, 15 | 0,4 | 0,6 | ||||
| 6, 16 | 0,4 | 0,6 | ||||
| 7, 17 | 0,4 | 0,6 | ||||
| 8, 18 | 0,4 | 0,6 | ||||
| 9,19 | 0,4 | 0,6 | ||||
| 10, 20 | 0,4 | 0,6 |
2.4 Контрольні питання
1. При яких ємнісних струмах замикання на землю потрібна установка дугогасних реакторів в електричних мережах напругою 6, 10, 35 кВ?
2. Які переваги мереж з резонансного настроювання дугогасних реакторів?
3. Яка максимальна напруга зсуву нейтралі допускається в нормальному режимі роботи компенсованої мережі?
4. Назвіть способи створення напруги нейтралі в нормальному режимі.
5. Які ви знаєте причини зміни ємнісного струму у експлуатації?
6. Поясніть принцип роботи фазового регулятора в нормальному режимі роботи мережі.
7 Побудувати векторну діаграму напруг при включенні конденсатора DС між фазою В и землею або фазою С и землею.
8. Яке призначення фазового коректора в регуляторі?
10. Які вимоги пред'являються до АСР ДР?
11. Назвіть причини виникнення автоколивань в АСР ДР і способи їх усунення.
12. Перелічите і коротко охарактеризуйте основні типи дугогасних реакторів.
13. Як моделюється дугогасний реактор в АСР ДР?
14. Як моделюється підсилювач з зоною насичення?
15. При настроюванні реактора було отримано наступне відношення між інерційності реактора і зоною нечутливості  . Який вид буде мати перехідна характеристика АСР ДР.
. Який вид буде мати перехідна характеристика АСР ДР.
Лабораторна робота 3
АНАЛІЗ ПЕРЕХІДНИХ ПРОЦЕСІВ ПРИ РЕГУЛЮВАННІ
ЧАСТОТИ І ПОТУЖНОСТІ В ЕНЕРГОСИСТЕМАХ
Мета роботи - оцінка динамічних властивостей автоматичної системи регулювання частоти і потужності в енергосистемі з теплових станцій при різних значеннях параметрів настройки регулятора.
3.1 Основні відомості
Відхилення частоти, на відміну від відхилення напруги, є загальносистемним показником якості електричної енергії, тому що у всіх точках синхронно працюючої системи частота однакова. Зміна частоти відбувається при порушенні балансу між сумарною потужністю турбін і активним навантаженням генераторів.
При зміні частоти в більшості споживачів міняється продуктивність, що в ряді випадків відбивається на технологічному процесі елементів і енергосистеми в цілому.
Відповідно до діючого ДСТУ припустимі відхилення частоти повинні бути  0,2 Гц (0,4%), а у европейских енергосистемах UCTE - ±0,01 Гц.
0,2 Гц (0,4%), а у европейских енергосистемах UCTE - ±0,01 Гц.
Безперервна підтримка номінального значення частоти в енергосистемі досягається за допомогою автоматичної системи регулювання частоти і потужності (АСРЧ і П), що включає в себе автоматичний регулятор частоту обертання (АРЧО) турбіни і автоматичний регулятор частоти і потужності (АРЧ і П) і агрегат.
Регулятор частоти обертання - первинний регулятор турбіни. Він автоматично змінює обертаючий момент турбіни, впливаючи через регулювальний орган на впуск енергоносія (пару, води). У якості регулюючого органу парової турбіни застосовуються регулювальні клапани. АРЧО виконує наступні основні функції [1]:
- регулювання частоти обертання за прийнятим законом;
- обмеження можливих збільшень частоти обертання при перехідних процесах;
- пуск і зупинка турбіни;
- зміна частоти обертання при синхронізації генератора;
- розподіл навантаження між генераторами, що працюють паралельно,.
На парових турбінах може застосовуватися гідромеханічний АРЧО, функціональна схема якого показана на рис. 3.1 [1, 2].
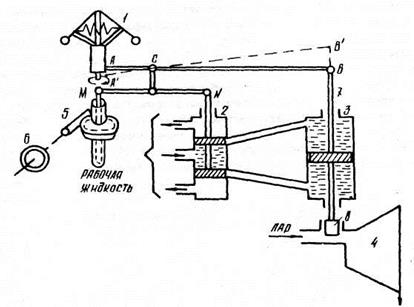
1 - відцентровий маятник; 2 - золотник; 3 - сервомотор;
4 - парова турбіна; 5 – механізм керування турбіною;
6 - електродвигун; 7- важіль ЖЗЗ; 8 - регулювальний орган
Рисунок 3.1 - Функціональна схема гідромеханічного АРЧО:
Регулятор працює в такий спосіб. При зміні частоти обертання турбіни, наприклад, убік зменшення, маятник 1 переміщає муфту з положення А вниз. Поршень золотника 2 з середнього положення також опускається вниз. Важіль АВ займає положення А' B'. Масло під тиском починає надходити в нижню порожнину сервомотора 3, а з верхньої порожнини йде на злив. Поршень сервомотора, переміщаючись впливає на регулювальний орган 8, який збільшує впуск пару в турбіну. Цей регулюючий вплив сприяє збільшенню частоти обертання, тобто переміщенню важеля АВ нагору. На переміщення точки С впливає переміщення поршня сервомотора завдяки жорсткому зворотному зв'язку (ЖЗЗ) 7.
Регулювання буде тривати доти, поки поршень золотника 3, а отже, і точка С не повернуться знову у вихідне положення, при якому вікна золотника 2 будуть закриті. Сталий режим наступає при зниженій швидкості обертання агрегату, тому що під дією ЖЗЗ важіль АВ займе вихідне положення А В.
Якщо прийняти, що прирощенню точок А и В відповідає DА=K1×Df, DВ= K2×DР , то умова сталого режиму (закон регулювання агрегату) :
Df+S×DР=0 , (3.1)
де S=Df/DР - коефіцієнт статизму характеристики АСРЧО.
Таким чином, регулювання частоти залежно від потужності, що розвивається агрегатом, АРЧО здійснює за законом статичного регулювання.
 |
Для зсуву статичної характеристики регулювання уздовж осі f служить механізм керування турбіною (МКТ) 5. Переміщуючи за допомогою МКТ точку М нагору (при цьому змінюється уставка регулювання), впливають на поршень золотника, переміщуючи його вниз. Збільшення впуску пару приведе до збільшення частоти обертання при роботі генератора на ізольоване навантаження. При роботі генератора в енергосистемі (при незмінній частоті) за допомогою МКТ можна змінювати навантаження агрегата в межах його регулювального діапазону (рис. 3.2.а).
 |
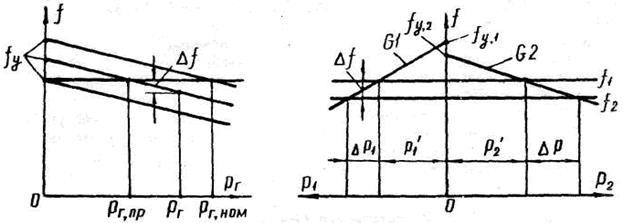
а б
Рисунок 3.2 - Статичні характеристики АСРЧО: а - астатичне регулювання частоти статичним АРЧО; б - розподіл навантажень між двома паралельно
працюючими агрегатами
Розглянутий закон регулювання (3.1) може бути також представлений виразом:
 f+ S(Рг - Рг,пр)=0,
f+ S(Рг - Рг,пр)=0,
де Рг – поточна потужність, що розвивається генератором;
Рг,пр – запропонована (задана) потужність.
Під запропонованою потужністю розуміється її значення при номінальній частоті і даному положенні статичної характеристики. Отже, при заданої уставці АРЧО (рис. 3.2,а). Закон статичного регулювання має місце при Рг,пр = constіDf ¹ 0.
Статичний АРЧО забезпечує однозначність розподілу активних навантажень між паралельно працюючими генераторами при будь-якому значенні частоти. Це ілюструється графіками на рис. 3.2,б , де зображені статичні характеристики АСРЧО генераторів G1 і G2, що мають уставки fy,1і fy,2і коефіцієнти статизму S1 і S2. Частоті f1 відповідають навантаження генераторів Р'1 і Р'2. При збільшенні сумарного навантаження на ΔР і зниженні частоти на Df до значення f2одержимо:
 ,
,  , де
, де  ; ΔР =ΔР1 +ΔР2. Звідки маємо:
; ΔР =ΔР1 +ΔР2. Звідки маємо:
 (3.2)
(3.2)
З виразу (3.2) слідує, що збільшення навантаження електростанції DР розподіляється зворотно пропорційно коефіцієнтам статизма характеристик АСРЧО.
При використанні статичного регулятора частота в енергосистемі не підтримується з необхідною точністю і залежить від активного навантаження електростанцій. Коефіцієнт статизму енергосистеми Sc не буває нижче середнього значення коефіцієнта статизма окремих АСРЧО (4¸5 %). Однак відповідно до нормативних вимог відхилення частоти не повинна бути більше 0,4%, що обумовлює необхідність регулювання частоти за астатичним законом. Таке регулювання може бути реалізоване шляхом автоматичної зміни уставки АСРЧО, тобто переміщенням його статичної характеристики. При цьому змінюється запропоноване значення потужності Рпр у законі статичного регулювання:
Δf + Sс×(Р - Рпр)=0.
Рішення цієї задачі досягається регулятором АРЧ і П, що називається вторинним регулятором частоти. Цей регулятор призначений для виконання наступних функцій:
- підтримки частоти в енергосистемі в заданих межах;
- економічного розподілу навантаження між паралельно працюючими генераторами (електростанціями), що забезпечує мінімум виробничих витрат по енергосистемі при даному сумарному споживанні активної потужності і розміщенні споживачів;
- обмеження потоків активної потужності в сильно завантажених лініях електропередачі з метою попередження порушення статичної стійкості енергосистеми.
Відомі методи регулювання частота і потужності розділяються на два види: регулювання за миттєвим і за інтегральним відхиленням частоти [10].
У першому методі однозначність у розподілі визначається тим, що сигнал запропонованого значення потужності Рпр вводиться в закон регулювання в явному виді. У методі інтегрального регулювання сигнал Рпр визначається непрямим шляхом - через інтегральне відхилення частоти в енергосистемі.
У даній роботі досліджується АРЧ і П за інтегральним відхиленням.
Інтегральна функція відхилення частоти формується за виразом [1]:
де t0 і t1 – часи виникнення і зникнення Δf; k – коефіцієнт пропорційності.
Для оптимального розподілу навантаження між агрегатами частотнорегулюємої станції по рівності відносних приростів витрати енергоносія величина δfповинна бути перетворена в Рпр,i, що може бути реалізовано відповідним вибором коефіцієнта k. У цьому випадку інтегральна функція використовується як міра відносного приросту, а значення Рпр визначається функціональним перетворенням характеристики відносного приросту витрати палива (ХВП) агрегату згідно виразу:
 (3.3)
(3.3)
Спосіб реалізації цієї автоматичної системи регулювання ілюструється на прикладі блокової електростанції, схема якої наведена на рис. 3.3. У регулюванні частоти беруть участь n турбоагрегатів. Регулюючий вплив на МКТ i - го агрегату формується за законом:
 , (3.4)
, (3.4)
де kf×Df – регулюючий вплив, що обумовлений відхиленням частоти від номінального значення;
kSi – коефіцієнт, що забезпечує відповідність регулюючих впливів;
Рi - потужність i -го агрегату;
 - запропонована потужність i- го агрегату.
- запропонована потужність i- го агрегату.
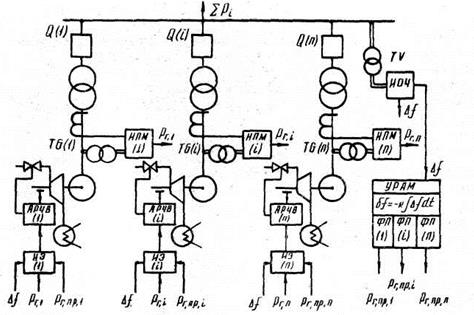
Рисунок 3.3 - Функціональна схема вторинного регулювання частоти і
потужності за пропорційно-інтегральним відхиленням
Для визначення Рпр,iпо ХВП i -го агрегату служить пристрій розподілу активної потужності (УРАМ), у якому формується інтегральна функція df і відбувається її функціональне перетворення в Рпр,i. На кожному з nвиходів УРАМ формується для кожного агрегату Рпр,i.
Регулюючі впливи, створені відповідно до (3.4) реалізуються через виконавчий елемент ИЭ, характеристика якого забезпечує реверсивну роботу електродвигуна МКТ, тобто є дія убік як збільшення, так і зменшення навантаження агрегату.
Процес регулювання протікає в такий спосіб. При порушенні балансу активних потужностей в енергосистемі з'являється відхилення частоти від номінального значення (Δf ≠ 0). При цьому відбувається автоматична зміна потужності Рпр,i, що задається кожному агрегату. Під дією сигналів kf×Df і Рi-Рпр,iзмінюється потужність агрегатів. Регулювання припиниться тоді, коли перестануть змінюватися Рпр,i, тобто коли відновиться номінальна частота. У сталому режимі частота номінальна, а розподіл навантажень оптимальний при нових значеннях Рпр,i:
Δf=0; Рi = Рпр,i.
Важливо відзначити, що сигнал, пропорційний інтегральному відхилення частоти, сповільнює процес регулювання. Для підвищення якості регулювання використовується сигнал kf×Df. Таким чином, АРЧ і П реалізує пропорційно-інтегральний закон регулювання.
Дослідження динаміки АСРЧ і П виконується при наступних основних допущеннях [2, 3].
Енергосистема приведена до одного узагальненого агрегату "турбіна-генератор", що дозволяє розглядати загальний (середній) рух паралельно працюючих агрегатів (електростанцій). Це допущення досить близько до дійсності для зосереджених енергосистем при однакових характеристиках регулюючих пристроїв на всіх агрегатах.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|