- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Синхронизированные двигатели
Синхронизированные двигатели
Когда мы только начинали, то мы говорили о том, что хотели бы, чтобы робот ехал прямо. Его двигатели должны двигаться одинаковой скоростью. С помощью PID-регулирования мы смогли задавать мощность обоих двигателей для поддержания заданной скорости, чтобы они двигались с одинаковой скоростью. Но этого не достаточно для полной синхронизации двигателей.
К примеру, если одно колесо зафиксировать, то другое будет продолжать вращаться со скоростью, которая была установлена, и робот начнет вращаться по кругу. Поэтому мы должны обеспечить соблюдение одинаковой скоростью на двух двигателях, т.е. не только авторегулирование мощности, но и установить прямую зависимость одного двигателя от другого, чтобы двигатели «копировали» друг друга.
ROBOTC включает в себя функцию под названием «Синхронизация двигателей», которая позволяет выполнить сопряжение двух двигателей, и определять их скорость относительно друг друга. Если, к примеру, вы прикажите одному двигателю ехать, а потом остановиться, то второй повторит все действия первого. Цель синхронизации – работа двигателей, как единое целое, которая имеет приоритет над достижением «идеальной» скорости.
А теперь разберемся, как это можно осуществить.
Создайте новый проект и вставьте туда следующий код:

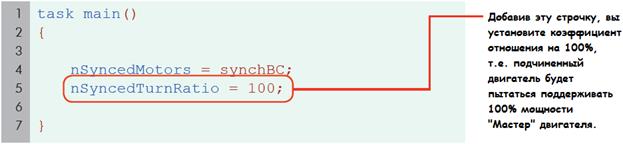
Теперь двигатели B и C находятся в синхронном режиме. Важное значение имеет порядок букв в «synchBC», потому что один из двух двигатели будет играть ведущую роль, а другой – роль подчиненного.
Двигатель B (первая буква в "synchBC") называется «Master» мотором, а C (второй) называется подчиненным двигателем. Все команды, такие как скорость и торможение, выдаются через «Master» двигатель.
Но и в этом случае подчиненный двигатель не получает команду «скорость». Вместо этого, мы даем ему отношением команд. Этот коэффициент определяется как процент от позиции первого двигателя. Для полной синхронизации установим соотношение двигателей на 100%.
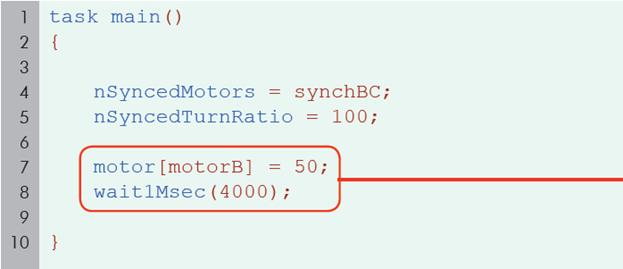
Далее дайте команду «Мастер» двигателю, чтобы он двигался вперед с 50% мощностью 4 секунды.
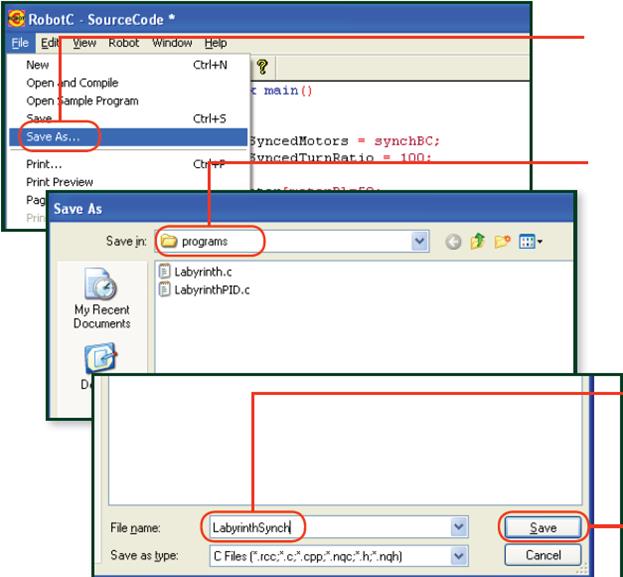
Сохраните программу, загрузите на робота и запустите.
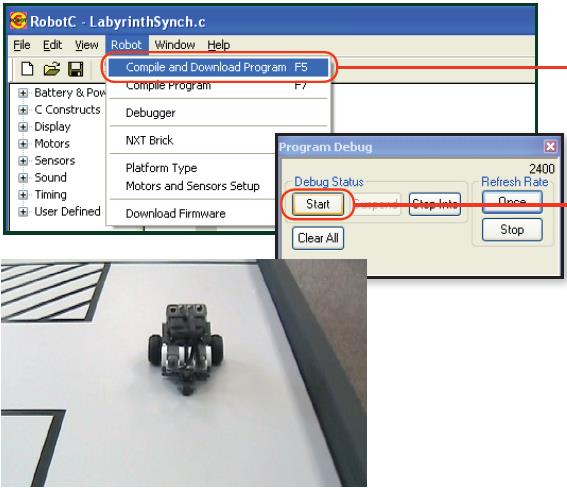
Теперь двигатели постоянно обновляются для поддержания идентичных позиций. Если главный двигатель случайно остановится, то другой двигатель тоже остановится. Синхронизация используется для гораздо большего, чем просто ехать прямо. Например, для поворотов. Как вы видели, когда вы впервые столкнулись с поворотами, все, что вам нужно сделать, это установить двигатели двигаться с разной скоростью. Теперь это можно сделать и с помощью синхронизации, подчиненный двигатель должен вращаться с мощностью в -100% от скорости «Мастер» двигателя.

Конец раздела
Синхронизация моторов позволяет управлять роботом таким образом, что приоритетный двигатель выравнивает по скорости подчиненный. Теперь мы с уверенностью можем сказать, что наш робот поедет прямо.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|