- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Приводы, манипуляторов
2. Приводы, манипуляторов
Для обеспечения управления манипуляторами и достижения необходимой координации перемещений бурильной машины в систему вводятся дополнительные кинематические связи: механические и гидравлические. Иногда применяют системы с датчиками обратной связи. Механические связи наиболее просто осуществляются по схеме параллелограмма (рис. 1,а). На кронштейне 1 крепится параллелограмм, состоящий из элементов 2, 3, 4, 5. При работе привода 6 элемент 7 перемещается параллельно своему начальному положению.
Параллелограмм также располагают и в горизонтальной плоскости. Система с двумя параллелограммами показана на рис. 1,б. При подъеме и повороте стрелы податчик 1 всегда находится в положении, параллельном исходному.
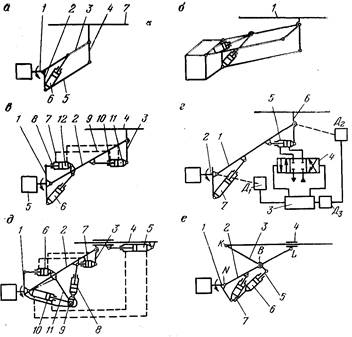
Рис. 1. Схемы систем управления приводами манипуляторов
При использовании телескопической стрелы упомянутые схемы неприемлемы; в этих случаях применяют схемы с гидравлическими связями.
На рис. 1,в изображена схема манипулятора, состоящего из кронштейна 1, с которым шарнирно соединена стрела 2, связанная звеном 3 с податчиком 4. Вращение стрелы осуществляется приводом 5. При опускании стрелы 2 гидроцилиндром 6 масло из штоковой полости 7 пилот-цилиндра 8 протекает в штоковую полость 9 исполнительного цилиндра 10, а из поршневой полости 11 в полость 12. При такой схеме сохраняется параллельность податчика.
Схема 1,в может работать и без пилот-цилиндра. В этом случае гидравлическая связь осуществляется
последовательным соединением штоковых полостей цилиндра подъема стрелы и цилиндра наклона податчика. Необходимым условием для соблюдения параллельности движения податчика является соответствие размеров цилиндра наклона податчика размерам цилиндра подъема стрелы. Конструкция манипулятора при этом получается громоздкой. Указанный недостаток устраняется введением промежуточного гидравлического мультипликатора, согласующего объемы цилиндров наклона и цилиндра подъема стрелы.
В схеме 1,г задача сохранения параллельности податчика при перемещении стрелы решается введением системы слежения.
При повороте стрелы 1 относительно кронштейна 2 изменяется сигнал датчика Д1 включенного в усилитель рассогласования 3. Усилитель 3 выдает сигнал на включение распределителя 4, который подает масло в привод 5 в таком направлении, при котором сигнал-с датчика Д2, связанного со звеном 6, уравновешивает сигнал с датчика Д1. При равенстве сигналов датчиков Д1 и Д2 на выходе усилителя 3 сигнал пропадает и распределитель 4 устанавливается в нейтральное положение. Датчик Д3 задает угол первоначального рассогласования звеньев 2 и 6 и устанавливается вручную. Подъем стрелы в вертикальной плоскости осуществляется приводом 7. Датчики в схеме 3.1,г применяются электрические, гидравлические или пневматические.
На рис. 2.1,д показан манипулятор с гидравлическими связями. Манипулятор состоит из кронштейна 1, стрелы 2, рычага 3, податчика 4, двигающегося в продольных направлениях с помощью гидроцилиндра 5.
Штоковые и поршневые полости цилиндров 6 и 7 сообщены между собой и действуют аналогично схеме 1,в.
При работе привода 8 стрела 2 отклоняется от продольной оси, при этом звено 9 передвигает шток пилот-цилиндра 10 и вытесняет из него масло, поступающее в полость цилиндра 5, ход штока которого осуществляет отход конца стрелы от забоя.
Фирма «Атлас Копко» предложила манипулятор, показанный на рис. 1,e. Манипулятор состоит из кронштейна 1, стрелы 2, балки 3, направляющей головки манипулятора 4, тяги 5, привода наклона 6, привода подъема стрелы 7. Длина отрезков NB, BL и ВК. одинакова. В свою очередь, длины остальных звеньев манипулятора должны подбираться таким образом, чтобы скорость точки К. в относительном движении вокруг точки В была равна скорости точки В относительно точки N. В этом случае соблюдается параллельность перемещения звена 4 и точка К перемещается в одной плоскости, т. е. происходит автоматическая компенсация отхода стрелы от забоя.
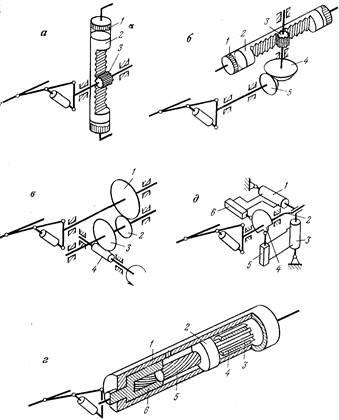
Рис. 2. Конструктивные схемы механизмов вращения
манипуляторов
Большинство современных манипуляторов имеют приводы вращения, которые выполняются по различным схемам, каждая из которых обладает своими особенностями. Рассмотрим несколько наиболее употребительных схем. Привод по схеме, показанной на рис. 2,а, устроен из гидроцилиндра 1, плунжера 2 с рейкой, которая находится в зацеплении с шестерней 3. Достоинством схемы является простота конструкции. Такой привод широко используется в бурильных установках среднего и большого размеров.
В установках малого размера предпочтение отдают приводу, изображенному на рис. 2,б. В этом приводе реечно-домкратный механизм дополнен парой конических шестерен 4 и 5. Привод имеет небольшие размеры в длину и по высоте. Он хорошо компонуется в бурильных установках с манипуляторами типа В1.
Привод по схеме рис. 2,е состоит из пары цилиндрических колес 1 и 2 и червячной пары 3 и 4. Червячная пара проектируется самотормозящейся, что позволяет фиксировать вал привода в заданном положении без тормоза. Такой привод применяют в манипуляторах типа В2.
Оригинальным является привод, построенный по схеме, представленной на рис. 2,г. Он состоит из цилиндра 1, поршня 2 с двумя штоками 3 и 4, причем шток 4 снабжен продольными шлицами, взаимодействующими со шлицами буксы 5, а шток 3 снабжен геликоидальными шлицами, взаимодействующими с такими же шлицами втулки 6, вращающейся в корпусе цилиндра 1.
При перемещении поршня 2 он не вращается, так как упирается в продольные пазы. Втулка 6 при взаимном перемещении со штоком 3 поворачивается относительно корпуса, вращая манипулятор. Привод по изложенной выше схеме имеет хорошие силовые характеристики, удачно компонуется в манипуляторах типа В2 и ВЗ. К его недостаткам следует отнести большие габариты в длину, особенно при больших углах поворота манипулятора.
Привод вращателя по схеме рис. 2,д состоит из двух гидроцилиндров 1 и 3, расположенных под углом, кривошипа 2, кулачка 4 и гидрораспределителей 5 и 6.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|