- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Классификация манипуляторов
Лабораторная работа №3
Манипуляторы бурильных установок
Цель работы:Рассмотреть конструкции манипуляторов шахтных бурильных установок.
1. Классификация манипуляторов
Манипуляторы являются составной частью шахтной бурильной установки, предназначенные для перемещения бурильной машины в пространстве и ее фиксации в нужном месте забоя в положении для бурения шпура.
Манипуляторы крепятся к ходовой раме установки неподвижно или могут перемещаться по ней. Перемещение манипуляторов может производиться вдоль рамы установки или в плоскости, перпендикулярной к оси рамы.
Основными элементами современных манипуляторов являются: основание, стрела и позиционер. Основание служит для крепления манипулятора к раме установки. Стрела позволяет устанавливать бурильную машину в различной части забоя выработки. Позиционер служит для крепления бурильной машины на манипуляторе, придания ей нужного направления при бурении, а также для раскрепления ее в забое.
В качестве привода манипуляторов служат гидравлические цилиндры, пневматические цилиндры или двигатели с червячными редукторами или винтами. Неоспоримым преимуществом гидроприводов является быстрота действия, жесткость установки элементов манипулятора и малые размеры.
К современным манипуляторам предъявляются следующие требования:
быстрое перемещение и надежное закрепление бурильной машины в положении для бурения; обеспечение автоматического сохранения параллельности бурильной машины в процессе манипуляций;
возможность бурения наклонных шпуров в диапазоне углов, определяемых технологическими требованиями;
возможность бурения оконтуривающих шпуров с минимальными углами наклона (до 5°) к оси выработки.
Поскольку положение тела в пространстве определяется шестью координатами, число степеней свободы и, следовательно, число приводов в манипуляторах должно быть таким же.
В некоторых манипуляторах число приводов может быть меньше, но технологические возможности таких манипуляторов ограничены бурением шпуров в определенных направлениях.
Манипулятор должен обеспечить следующие движения бурильной машины:
перемещение по горизонтали;
перемещение по вертикали;
изменение угловой координаты оси инструмента в вертикальной плоскости (наклон бурильной машины);
изменение угловой координаты оси инструмента в горизонтальной плоскости (поворот бурильной машины);
перемещение бурильной машины на забой (надвигание и распор);
вращение бурильной машины, при котором она обращается к стенке выработки своим наименьшим габаритом, с целью максимального приближения оси шпура к контуру выработки.
Приводы манипуляторов, обеспечивающие эти движения, могут быть разбиты на четыре группы: приводы надвигания (движение бурильной машины на забой), приводы поворота, приводы наклона и приводы вращения.
Анализ конструктивных схем манипуляторов различных типов показал, что на их технологические свойства влияют следующие конструктивные признаки, которые должны быть приняты в качестве классификационных:
расположение в кинематической цепи манипулятора приводов, осуществляющих их основные движения; взаимное расположение стрелы и бурильной машины; степень автоматизации управления.
Таким образом, классификация манипуляторов бурильных установок должна охватывать три классификационных признака, причем по каждому признаку возможно несколько вариантов исполнения.
Известно большое количество конструктивных схем манипуляторов, в которых реализованы различные комбинации признаков и их исполнений. В целях классификации всего существующего многообразия схем введем для каждого варианта схемы классификационный шифр, состоящий из буквенных обозначений признаков и цифровых обозначений варианта его исполнения Варианты исполнения приводов принимаются по табл. 2.1. Если в схеме манипулятора какой-либо привод отсутствует, то в шифре отсутствует и обозначение этого привода. В случаях, когда перемещение осуществляется двумя и более приводами, в шифре указываются номера расположения каждого из них, при этом число цифр в шифре соответствует числу приводов в манипуляторе.
Взаимное расположение стрелы и податчика бурильной машины при расположении бурильной машины в одной вертикальной плоскости с осью стрелы манипулятора обозначим Б1, а при консольном расположении бурильной машины относительно стрелы — Б2
Таблица 1.
| Привод, шифр | Расположение привода в кинематической схеме манипулятора | Схема расположения привода | ||
| Надвигание бурильной машины и распор, Н | Между основанием и ходовой частью установки | 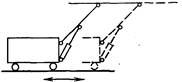
| ||
|
| В стреле (телескопичес-кая стрела)
| 
| ||
|
| Между позиционером и податчиком | 
| ||
| Поворот стрелы и бурильной машины, П
| Между основанием и стрелой
| 
| ||
| Продолжение табл. 1 | ||||
|
| В позиционере стрелы | 
| ||
|
| В кронштейне стрелы (в манипуляторах типа «Вращающаяся стрела») | 
| ||
| Наклон стрелы бурильной машины, У | Между основанием (кронштейном) и стрелой
|
| ||
| В позиционере стрелы
|
| |||
| Вращение бурильной машины, В | Между основанием и стрелой |
| ||
|
Окончание табл. 1 | ||||
| В стреле |
| |||
| Между податчиком и стрелой (в позиционере) |
| |||


По степени автоматизации управления приводами манипуляторы подразделяются на четыре типа: А1 — раздельное управление всеми приводами; А2—автоматическое согласование работы приводов обеспечивает параллельное перемещение бурильной машины в одной плоскости; A3—автоматическое согласование работы приводов обеспечивает параллельное перемещение бурильной машины в двух плоскостях, А4 — автоматизация степени A3 и автоматическое согласование работы привода, обеспечивающее компенсацию отхода бурильной машины от забоя.
Классификационные шифры различных типов манипуляторов приведены ниже при их описании.
По технологическим свойствам манипуляторы бурильных установок подразделяются на специализированные и универсальные. Первые предназначаются для бурения в ограниченной зоне. Они имеют меньшее число приводов и проще по конструкции. Применяются для обуривания фронтальных забоев, главным образом при проведении подготовительных выработок и тоннелей. Универсальные манипуляторы имеют большее число приводов и позволяют обуривать фронтально — радиальное расположение шпуров.
Манипуляторы типа H1 предусматривают наличие тележки, на которой укреплено основание стрелы. Тележка служит для передвижения манипулятора Устройство получается громоздким. Несколько лучше манипуляторы типа Н2 с телескопической стрелой Надвигание здесь осуществляется под углом к направлению бурения, причем в процессе надвигания также происходит изменение высоты расположения бурильной машины. Это усложняет наведение ее на заданное для бурения место в забое.
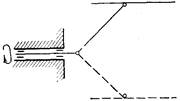
Наиболее простыми и надежными являются манипуляторы типа НЗ, у которых компенсация отхода осуществляется надвиганием бурильной машины в направлении оси бурения с помощью гидроцилиндра, расположенного на позиционере. Достоинством этих манипуляторов является также возможность использования механизма надвигания для распора податчика. Известны манипуляторы типа Н23, в которых объединена телескопическая стрела с цилиндром надвигания бурильной машины. Эта схема применяется для обуривания высоких забоев.
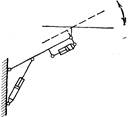
Поворот стрелы манипулятора в горизонтальной плоскости осуществляется чаще всего с помощью гидроцилиндров. Наибольшее распространение получили манипуляторы типа П12, которые позволяют обуривать большую зону по ширине, а также располагать шпуры под значительными углами к плоскости забоя Наклон стрелы в вертикальной плоскости (подъем и опускание) производится с помощью цилиндра подъема стрелы Одновременно действует и гидроцилиндр наклона по датчика, чтобы сохранить параллельность бурения шпуров. Иногда ставят два цилиндра, тогда стрела шифруется У22.
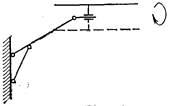
Вращение бурильной машины осуществляется по трем схемам. Вращение манипулятора относительно горизонтальной оси, параллельной продольной оси установки типа В1, имеет наибольшее распространение. Достоинством этого типа манипуляторов является простота конструкции, большая зона бурения круговой формы, возможность обеспечения минимальных углов наклона оконтуривающих шпуров, упрощенное управление. Недостатком манипуляторов типа В1 является ограниченные возможности обуривания кровли выработок, а также обуривания забоя наклонными шпурами.
Часто вращатель встраивают в стрелу манипулятора (тип В2). Вращение бурильной машины в этом случае производится относительно оси стрелы, располагаемой, как правило, под большим углом к оси бурения. При работе вращателя нарушается параллельность податчика исходному положению, что требует выполнения дополнительных маневров при наведении на шпур.
Манипуляторы типа ВЗ имеют ось вращения, параллельную оси бурения, и лишены недостатков, отмеченных у манипуляторов типа В2. Их недостатком является расположение вращателя на конце стрелы, что снижает устойчивость установок.
Взаимное расположение податчика и стрелы шифруется Б1 и Б2. Схема типа Б1 (расположение податчика в одной плоскости с осью стрелы) широко применяется в манипуляторах, оснащенных вращателями (В1, В2, ВЗ), поскольку при отсутствии вращателя становится недоступной зона почвенных шпуров. При консольном расположении податчика относительно стрелы (тип Б2) зона обуривания не охватывает шпуры, находящиеся со стороны податчика. В связи с этим манипуляторы типа Б2 при отсутствии вращателя применяются в паре с правым и левым исполнением. Поскольку стрела не поворачивается, нижние шпуры бурятся при относительном большом угле к почве выработки.
Системы автоматизации управления разделены на четыре типа. Каждый последующий имеет более высокий уровень автоматизации и, следовательно, более сложную и дорогую систему управления. Манипуляторы типа А4 позволяют производить движения податчиком с минимальными затратами времени. Это особенно важно при бурении слабых пород, когда время бурения одного шпура составляет 20—30 с. В этом случае применяют совершенные системы автоматизации, в том числе снабженные системой автоматического программного выполнения паспорта буровзрывных работ. Манипуляторы типа А4 пока еще известны лишь в виде экспериментальных образцов.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|