- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
аппаратная структура ПА
аппаратная структура ПА
альной удаленностью входящих в нее устройств. Комплексы АПНУ, решающие задачу обеспечения устойчивости в некотором энергоузле (энергорайоне), могут целиком или частично входить в состав более обширных комплексов АПНУ.
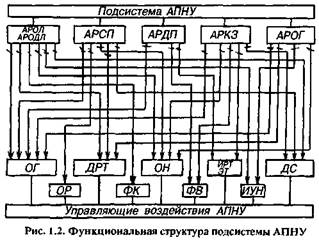
1.2. ФУНКЦИОНАЛЬНАЯ И АППАРАТНАЯ СТРУКТУРА ПОДСИСТЕМЫ АПНУ
Подсистема АПНУ включает следующие виды автоматики разгрузки при:
отключении одной или двух линий электропередачи (АРОЛ, АРОДЛ); статической перегрузке электропередачи (АРСП); динамической перегрузке электропередачи (АРДП); близких или затяжных коротких замыканиях (АРКЗ).
Перечисленные виды автоматики являются наиболее распространенными и составляют основную часть подсистемы АПНУ.
Возможно выделение в составе подсистемы АПНУ и других видов автоматики. Например, в последние годы в связи с ростом единичной мощности генераторов и энергетических блоков все более широкое применение находит автоматика разгрузки электропередач при отключении генераторов (АРОГ). Внезапное отключение мощных генераторов или энергоблоков в дефицитной части энергосистем (энергообъединений) может привести к перегрузке и нарушению устойчивости по связям, загруженным в исходном режиме в их сторону.
Для выполнения возложенных задач подсистема АПНУ осуществляет различные управляющие воздействия. На начальных этапах развития автоматика действовала в основном на отключение гидрогенераторов или на деление электрической сети (ДО. В настоящее время АПНУ использует широкий спектр воздействий, включающий:
отключение турбогенераторов (ОГ);
кратковременную (импульсную) и длительную разгрузки турбин (ИРТ,
ДРТ);
отключение части нагрузки потребителей (ОН);
частотный пуск гидрогенераторов (ЧП) и перевод их из режима синхронного компенсатора в активный режим;
загрузку гидро- и турбогенераторов (ЗГ);
электрическое торможение ОТ) агрегатов путем включения нагрузочных
активных сопротивлений. 8
Ввиду меньшей эффективности относительно повышения пределов устойчивости дополнительными считаются:
воздействия на отключение шунтирующих реакторов (ОР); форсировка устройств продольной и поперечной компенсации (ФК); форсировка возбуждения (ФВ) и изменение уставки АРВ по напряжению (ИУН).
Полная структура подсистемы АПНУ и распределение основных и дополнительных управляющих воздействий по видам автоматики показаны на рис. 1.2. Для каждого вида автоматики указаны лишь наиболее часто используемые воздействия. При конкретном выполнении автоматики в эксплуатации в зависимости от возможности осуществления тех или иных управляющих воздействий и их режимных характеристик с целью обеспечения требуемых пределов устойчивости и повышения эффективности воздействий могут привлекаться и другие их виды.
Рассмотрим вопросы структурно-аппаратного построения автоматики предотвращения нарушения устойчивости; при этом для краткости изложения опустим некоторые аппаратные тонкости, не существенные с точки зрения режимных принципов построения АПНУ.
Простейшая автоматика (рис. 1.3 а) включает в себя пусковой орган (ПО), высокочастотный телеканал — передатчик и приемник исполнительных команд (ПРД1 — ПРМ1) — и испол-
нительное устройство (ИУ), посредством которого осуществляется требуемое управляющее воздействие (например, на отключение части нагрузки подстанции или части генераторов электростанции). При необходимости передачи исполнительных команд на разные объекты могут быть организованы высокочастотные телеканалы и в других направлениях (передатчик ПРД2, рис. 1.3).
Исполнительное устройство может иметь различные степени сложности. В простейшем случае — это фиксированная релейная схема, выполняющая строго определенное управляющее воздействие (отключение конкретных выключателей, формирование дозированного управляющего импульса, подаваемого на вход системы регулирования турбины, и др.). В более сложном исполнении схема может предусматривать оперативное переключение исполнительных цепей с помощью накладок коммутаторов и др. Наконец, в составе ИУ может быть использована микроЭВМ, автоматически формирующая исполнительные цепи
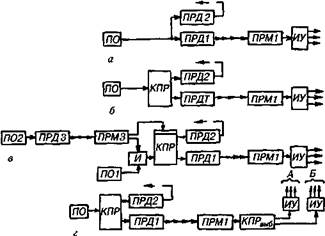
Рис. 1.3. Структура простейшей автоматики
а — с действием по заданному аварийному возмущению; б — с контролем предшествующего режима и действием по возмущению; в — с фиксацией наложения двух аварийных событий или аварийного возмущения в ремонтной схеме; г — с автоматическим выбором направления воздействия по параметрам предшествующего
режима
в зависимости от условий реализации управляющих воздействий на одном или нескольких объектах (электростанциях, подстанциях) .
Описанную автоматику называют «автоматикой по возмущению». При фиксации ПО заданного аварийного возмущения или достижении контролируемым параметром режима заданного значения (уставки) осуществляется без какого-либо дополнительного контроля программное управляющее воздействие заданной интенсивности. Такую структуру имеет, например, автоматика разгрузки при статической перегрузке электропередачи (АРСП).
В отличие от «автоматики по возмущению» автоматика, изображенная на рис. 1.3 б, действует только в строго определенной области режимов. Для этого она снабжена органом контроля предшествующего режима (КПР). Срабатывание автоматики происходит, если значение контролируемого параметра в режиме, предшествующем зафиксированному ПО аварийному возмущению, превышало заданную уставку КПР, т. е. только в том случае, если предаварийный режим был достаточно тяжелым с ;точки зрения устойчивости.
\: Приведенной на рис. 1.3 б структуре могут соответствовать ^различные виды АПНУ. Наиболее распространена автоматика разгрузки при отключении одной из линий электропередачи (АРОЛ). Согласно этой же структурной схеме выполняется и АРОГ. Автоматика разгрузки при КЗ может проводиться по схемам (см. рис. 1.3 а или б).
Автоматика, структурная схема которой показана на рис. 1.3 0, контролирует не только предаварийный режим, но и состояние предаварийной схемы. Контролируемое автоматикой ремонтное или аварийное отключение линии или трансформатора фиксируется пусковым органом П02. Сигнал об изменении схемы передается по высокочастотному телеканалу ПРДЗ — ПРМЗ к месту установки пускового органа П01 и органа КПР, который перестраивается на ремонтную уставку. Если во время существования этой схемы произойдет фиксируемое П01 аварийное возмущение, а предшествующее этому возмущению значение контролируемого параметра режима превысит заданную ремонтную уставку органа КПР, то произойдет срабатывание автоматики — сигнал пройдет через логический элемент И и контакты
реле КПР, и будет передан по высокочастотному каналу ПРД1 — ПРМ1 к ИУ.
Описанную структуру имеет автоматика разгрузки при отключении контролируемой линии электропередачи в ремонтной схеме (АРОЛрем). Переход к ремонтной схеме фиксируется при отключении влияющей линии с неуспешным ТАПВ или ее отключении без КЗ с временем, превышающем паузу ТАПВ.
Подобную структуру может иметь автоматика, вводимая в работу в схеме разделения энергосистем или энергообъединений. В результате деления в одной или обеих частях энергосистемы могут создаваться условия устойчивости, сильно отличающиеся от условий устойчивости, имеющих место при параллельной работе. Если такие деления происходят часто по схеме или режиму, то может потребоваться выполнение специальной автоматики. В этом случае П02 фиксирует автоматическое разделение энергосистем на определенных выключателях или аварийное отключение контролируемой одиночной связующей линии электропередачи.
Структурная схема автоматики при одновременном отключении двух линии электропередачи (АРОДЛ) схожа с приведенной на рис. 1.3 в, однако предварительная перестройка уставки КПР не требуется. Автоматика срабатывает при получении сигналов об отключениях линий от П01 и П02 с разновременностью не более заданной на реле времени, входящем в состав логического элемента И.
Автоматика, структурная схема которой показана на рис. 1.3 г, в дополнение к автоматике согласно рис. 1.3 б содержит КПРвь,б, предназначенный для автоматического выбора одного из двух возможных управляющих воздействий, реализуемых на разных объектах. Орган КПРвыб используется тогда, когда необходимо обеспечить определенный приоритет одного из воздействий, например воздействия А. Тогда воздействие Б имеет место только в том случае, если воздействие А в данном режиме не обеспечивает необходимый объем разгрузки или может привести к недопустимой перегрузке близлежащих линий электропередачи. Реле КПРвь,б измеряет суммарную активную мощность электростанции А или переток по контролируемой линии электропередачи в предшествующем срабатыванию автоматики режиме и
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|