- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Таблица 3 8 страница
По структуре автоматические системы измерения делят на системы с разомкнутой структурой, т. е. системы прямого преобразования (называемые также небалансными), и с замкнутой структурой, т. е. балансные системы.
Небалансные системы (см. рис. 113, а) основаны на непосредственном измерении выходного сигнала первичного преобразователя. Все преобразования от выходного сигнала преобразователя X до выходного сигнала Y всей системы имеют одно направление: от входа системы к выходу.
Балансные системы (рис. 113, б) имеют замкнутую схему. В них контролируемая величина А уравновешивается известной величиной того же рода (например, напряжение уравновешивается напряжением). Выходная величина первичного преобразователя используется для компенсации (уравновешивания) входной измеряемой величины. К основной (прямой) цепи балансной системы добавляется обратная связь. В прямую цепь дополнительно вводятся элементы сравнения 5 и усиления 6. В обратную цепь входит балансирующий элемент 7, преобразующий выходной сигнал системы Хвых в компенсирующий Хк. На выходе элемента сравнения образуется разность ΔХ – X – Хк. Если эта разность равна нулю, то система находится в равновесии и показания воспроизводящего элемента соответствуют измеряемой величине А. При возникновении разбаланса АХ балансирующий элемент изменяет значения Хк до наступления нового равенства с изменившимся значением X. Показание воспроизводящего элемента изменяется пропорционально АХ.
В зависимости от характера процесса уравновешивания во времени балансные системы делят на системы непрерывного балансирования (следящего уравновешивания) и системы периодического балансирования (развертывающего уравновешивания).
В системах непрерывного балансирования балансирующая Хк и выходная Хвых величины непрерывно следят за изменениями входной контролируемой величины А. При неизменной входной величине А = const все элементы этих систем находятся в состоянии равновесия.
В системах периодического балансирования уравновешивающая величина X изменяется через определенные моменты времени по заданному закону независимо от изменения значения А. Перед каждым новым циклом уравновешивания значение выходной величины сбрасывается на нуль. При А = const все элементы непрерывно работают.
По виду выходного сигнала измерительные системы подразделяют на аналоговые, в которых используются стрелочные приборы, и системы с цифровым отсчетом, получившие наибольшее распространение.
2. ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ С ЦИФРОВЫМ ОТСЧЕТОМ
В настоящее время все более широкое распространение получает дискретное (цифровое) воспроизведение измеряемой величины, которая обычно является непрерывной (аналоговой) функцией времени.
В цифровых приборах измеряемая величина представляется в дискретной форме (числом), т. е. в виде окончательного результата измерения. Все бесконечное множество значений измеряемой величины в заданных пределах заменяется в цифровом приборе ограниченным рядом числовых значений, например, в четырехдекадном цифровом приборе – ограниченным рядом значений от 1 до 9999. Дискретная форма измеряемой величины обычно представляет собой определенное число электрических импульсов или их определенную комбинацию – код.
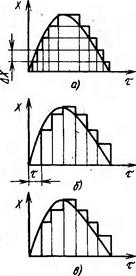
Рис. 114. Виды квантования сигналов:
а – по уровню; б – по времени; в – по уровню и по времени
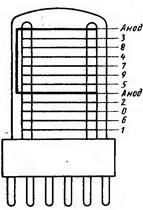
Рис. 115. Цифровая газоразрядная лампа
Дискретная форма представления величины по сравнению с аналоговой более удобна для визуального отсчета и регистрации, а также для передачи на расстояние. Применение приборов с цифровым отсчетом исключает субъективную погрешность отсчета.
При измерении числовое значение контролируемой величины определяется в процессе квантования. Квантованием называется процесс преобразования непрерывных (аналоговых) величии в дискретные. Различают три вида квантования: по уровню, по времени и смешанное по уровню и по времени.
Квантованием непрерывной величины по уровню (рис. 114, а) называют операцию, при которой непрерывная функция заменяется определенными дискретными значениями. Диапазон значений измеряемой величины X разбивается на одинаковые интервалы, называемые шагом квантования АХ, и вместо действительных значений измеряемой величины воспроизводятся ближайшие дискретные к ним значения.
Квантованием по времени (рис. 114, б) называется замена непрерывной величины ее значениями, взятыми в определенные дискретные моменты времени τтж, 2τк, ..., nτK, где величина τк называется периодом дискретности или интервалом квантования.
В цифровых измерительных приборах измеряемая величина преобразуется в число в результате комбинированного квантования (по уровню и по времени) – цифрового кодирования (рис. 114, в).
Для перехода от непрерывных значений измеряемого параметра в цифровой код автоматические измерительные приборы с цифровым выходом имеют аналого-цифровые преобразователи, осуществляющие преобразование непрерывных выходных сигналов первичных преобразователей в соответствующие им цифровые коды. Аналого-цифровой преобразователь является одним из основных узлов цифровой системы автоматического измерения.
Существующие аналого-цифровые преобразователи по конструктивному признаку делят на электромеханические и электронные, а по виду аналоговой величины – на преобразователи механических перемещений (линейных и угловых) и преобразователи электрических величин (токов, напряжений и т. д.).
Для воспроизведения показаний в цифровой форме применяют цифровые указатели (индикаторы) и регистраторы. Индикаторы выдают результаты измерений в цифровой форме для непосредственного восприятия оператором. Регистраторы воспроизводят результаты измерений также в цифровой форме и хранят их для дальнейшего непосредственного восприятия.
По принципу действия и конструктивному исполнению цифровые индикаторы выполняются в виде электромеханических устройств, цифровых ламп, электролюминесцентных знаковых элементов, устройств с подсветкой изображаемых цифр («световое табло»), электронно-лучевых трубок и др.
Цифровые индикаторы электромеханического типа представляют собой набор колес или непрерывных лент вращения, на которых нанесены изображения цифр. Эти индикаторы применяют главным образом в медленно действующих приборах, например в электрических счетчиках, массоизмерительных приборах различного рода и др.
В индикаторах на цифровых лампах для изображения цифр применяют газоразрядные лампы. Такая лампа (рис. 115) представляет собой стеклянную цилиндрическую колбу, заполненную неоном. Внутри колбы расположены десять катодов, которые выполнены из нихромовых проволочек, изогнутых в форме цифр от 0 до 9, и один сетчатый анод, охватывающий пакет катодов. При подаче напряжения на один из катодов между ним и анодом возникает тлеющий разряд, охватывающий всю поверхность катода, который начинает светиться, и очертания данной цифры становятся видимыми.
Электролюминесцентные знаковые индикаторы выполняют обычно из семи (иногда больше) изолированных полосок, образующих цифру 8. При подаче возбуждающего напряжения на соответствующие полоски возникает светящееся изображение любой десятичной цифры.
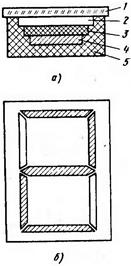
Рис. 116. Электролюминесцентный знаковый индикатор:
а – электролюминесцентный конденсатор; б – схема расположения элементов
Принцип действия индикатора состоит в использовании явления электролюминесценции, заключающегося в возникновении свечения люминофора (например, различных соединений фосфора) под воздействием электрического поля. Принципиально электролюминесцентный индикатор (рис. 116) является конденсатором с общим электродом 2, выполненным в виде прозрачной токопроводящей пленки из оксида кадмия, нанесенной на стекло 1. Второй электрод 4 конденсатора представляет собой изолированные друг от друга непрозрачные проводящие полоски из алюминия, отражающие свет, излучаемый люминофором 3. Электролюминофорный слой – смесь порошкообразного фосфора с диэлектриком – расположен между электродами 2 и 4 конденсатора. Конденсатор помещен в корпус 5 из диэлектриков. Для получения изображения нужной цифры напряжение подводят к определенным полоскам. Например, для получения цифры 2 необходимо включить пять полосок (на рис. 116, б, включенные полоски заштрихованы). Считывание происходит со стороны стекла, на котором темные полоски 4 отражают излучение люминофора, при этом очертание цифр возникает на темном фоне.
Регистрирующие устройства по их назначению можно разбить на две группы: цифропечатающие, выдающие результаты измерения для непосредственного восприятия их оператором; запоминающие, предназначенные для хранения и дальнейшей переработки информации. Их конструкция рассмотрена в гл. 20.
3. СИСТЕМЫ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ
Для уменьшения числа индивидуальных приборов применяют системы централизованного обегающего контроля. Основным техническим средством этих систем являются машины централизованного контроля, которые собирают, хранят и перерабатывают по определенному закону (алгоритму) информацию о ходе производственного процесса, поступающую от различных первичных преобразователей.
В этих системах показания всех приборов в форме электрических сигналов считываются в определенной последовательности обегающим устройством и перерабатываются в цифровую информацию, которая печатается в виде таблицы.
К машинам централизованного обегающего контроля можно присоединить первичные преобразователи, у которых выходной величиной является термоЭДС или изменение электрического сопротивления. Последовательное подключение к измерительному устройству машины централизованного обегающего контроля различных преобразователей требует от последних максимальной унификации выдаваемых сигналов по их виду и значению.
Рассмотрим принципы действия и типовую схему машины централизованного контроля (рис. 117). Основные функции, выполняемые машиной, следующие: опрос первичных преобразователей и сравнение полученных значений с заданной нормой; световая (звуковая) сигнализация и цифровая регистрация отклонений; измерение контролируемой величины и представление результатов измерения (в виде показания стрелочного прибора, цифрового указателя или записи) по запросу оператора; вычисление и анализ технико-экономических показателей, характеризующих объект контроля; цифровая регистрация измеренных и вычисленных значений параметров с заданной периодичностью, в том числе на перфокартах или магнитных лентах, для последующей обработки на вычислительной машине; цифровая регистрация значений параметров по запросу оператора.
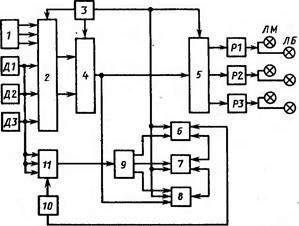
Рис. 117. Типовая схема устройства централизованного контроля
На вход машины от первичных преобразователей Д1...ДЗ поступают сигналы в аналоговой форме, чаще всего в виде напряжения или постоянного тока. Входной переключатель 2 по очереди подключает преобразователи к узлу обнаружения отклонения 4, фиксирующему отклонение контролируемого параметра от установленных задатчиком 1 пределов. При наличии отклонения с учетом знака последнего («меньше», «больше») через выходной переключатель 5, работающий синхронно с входным, сигнал поступает на выходные реле Р1 ... РЗ. Реле срабатывает и включает индикаторную лампу (ЛМ – «меньше», ЛБ – «больше»). Для цифрового представления значения контролируемого параметра преобразователи через входной переключатель 11 подключены к аналого-цифровому преобразователю 9, который выдает цифровой код, полученный в преобразователе; этот код используется в печатающем устройстве 8, регистрирующем значения контролируемых параметров, и в блоке логики 6, служащем для выявления причин нарушения работы объекта контроля, анализа причин аварий и т. д.
Печатающее устройство регистрирует значения всех или определенным образом выбранных контролируемых параметров. При регистрации всех параметров машина как бы опрашивает все каналы контроля, поэтому такая печать называется опросной. Опросная печать может запускаться либо автоматически в заранее выбранные и введенные в блок управления 3 моменты времени (периодическая регистрация), либо по произвольному выбору оператора с помощью блока выбора 10. Кроме того, этот блок позволяет вызвать данный параметр на показывающий и записывающий приборы. Визуальное наблюдение за параметрами осуществляется также с помощью цифрового показывающего прибора 7, на который оператор может вызвать значение любого контролируемого параметра из аналого-цифрового преобразователя либо из вычислительного устройства.
Информация, подлежащая обработке, поступает в вычислительное устройство, которое хранит результаты обработки в своей оперативной памяти и может выдавать их по требованию на печатающее устройство или цифровой показывающий прибор.
Промышленность выпускает различные виды устройств централизованного автоматического контроля. К их числу относятся ЭЛРУ-2, МАР-1, ЗЕНИТ-1 и др.
ЭЛРУ-2 (электронное логическое регистрирующее устройство) предназначено для автоматического централизованного измерения и цифровой регистрации на специальных бланках в виде таблиц параметров технологических процессов, а также для сигнализации при выходе этих параметров за пределы заданных значений. ЭЛРУ-2 может быть использовано для измерения и регистрации температуры, состава газовой фазы, давления, расхода и т. п. К устройству ЭЛРУ-2 может быть подключено 56 преобразователей.
МАР-1 служит для централизованного автоматического измерения и сигнализации 240 параметров и цифровой регистрации 200 параметров технологических процессов.
ЗЕНИТ-1 предназначен для измерения цифровой регистрации, сигнализации и позиционного регулирования 40 параметров технологических процессов.
МАРС-200-Р обеспечивает контроль по 200 параметрам технологических процессов и регулирование по 144 параметрам. Наиболее успешно машина работает при контроле температуры, реагируя на отклонение температуры до ±1°С.
Дальнейшим развитием централизованного контроля являются машины, содержащие блоки математической обработки полученной информации и выдачи результатов в соответствии с законом управления. Такие машины называют управляющими вычислительными машинами (УВМ).
4. СИСТЕМЫ АВТОМАТИЧЕСКОЙ СИГНАЛИЗАЦИИ
Предупредительная сигнализация извещает обслуживающий персонал о различных режимах работы оборудования или о непредвиденном его выключении, вызванном неисправностью или внешними причинами. Получаемая обслуживающим персоналом информация может быть как звуковой, так и световой.
Для подачи звуковых сигналов используются сирены, звонки, гудки, зуммеры и магнитофоны с предварительно записанными сообщениями. Громкость и частота звукового сигнала должны обеспечивать его хорошую слышимость на фоне производственных шумов (уровень сигнала должен быть выше на 10 дБ общего шума). Повышенной надежностью обладают модулированные (по высоте) и прерывающиеся во времени звуки.
В качестве визуальных сигнализаторов используются световые приборы: фонари, прожекторы, табло, транспаранты с надписью, указывающие характер событий, электромеханические реле с сигнальными флажками.
Отдельные сигнализаторы могут объединяться в комплекс (на пультах управления), дающий изображение текущего состояния контролируемого объекта.
Конструкция и параметры светосигнальных устройств должны обеспечивать надежное фиксирование сигнала глазом человека. Для этого необходимо создавать такую освещенность, при которой начинает восприниматься цвет сигнала. Сигнальные цвета должны быть контрастными по отношению друг к другу и окружающему фону.
В аварийной световой сигнализации предпочтение отдается красному цвету, который лучше всего виден сквозь пыль и дым. Хорошо воспринимается мигающий свет с частотой мигания не более 10 Гц и продолжительностью не менее 0,05 с.
Для надежного обнаружения светового сигнала сигнализаторы должны располагаться в пределах 30° от нормальной оси зрения оператора.
В качестве источников света в сигнализаторах используют лампы накаливания, лампы тлеющего разряда и электролюминесцентные приборы.
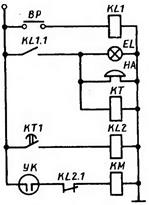
Рис. 118. Схема предупредительной сигнализации рольганговой печи
Характерным примером предупредительной сигнализации в термических цехах является устройство, применяемое на селитровых ваннах. Перегрев селитры выше определенной температуры недопустим, так как может вызвать взрыв. Для предупреждения перегрева предусматривается световая и звуковая сигнализации. Сигнальная лампа и звуковой сигнал включаются по достижении максимально допустимой температуры.
В литейных цехах при транспортировании и разливке жидкого металла обязательно предусматривается звуковая сигнализация.
Упрощенная схема предупредительной сигнализации рольганговой печи с водоохлаждаемыми роликами показана на рис. 118. Если по каким-либо причинам вода недостаточно охлаждает ролики (или совсем прекратилась подача воды), приводится в действие световая и звуковая сигнализации. При недостатке воды в охлаждающей системе реле ВР замыкают контакты и включает промежуточное реле KL1, контакт которого включает сигнальную лампу EL и звуковой сигнал НА. Одновременно возбуждается реле КТ, которое своим контактом КТ1 через определенный интервал времени включает промежуточное реле KL2. Контакт KL2.1 этого реле размыкается, и цепь управления магнитным пускателем КМ с управляющим контактом УК разрывается.
Аналогичные схемы применяют и для контроля смазки подшипников ответственных механизмов.
Контрольные вопросы и задания
1. Расскажите о значении систем автоматического контроля и их видах.
2. Какай система носит название системы контроля с цифровым отсчетом?
3. Что такое квантование?
4. Расскажите о видах цифровых индикаторов.
5. Какое назначение имеет система централизованного контроля?
6. Расскажите о назначении и характеристике систем централизованного контроля, выпускаемых промышленностью.
7. Расскажите о видах систем автоматической сигнализации.
8. Расскажите о средствах технологической сигнализации.
ГЛАВА 14. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
1. ОСНОВНЫЕ ПОНЯТИЯ и ОПРЕДЕЛЕНИЯ
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, – регулируемой величиной. Например, если уровень жидкости в закалочном баке снижается, то необходимо увеличивать подачу воды в бак до тех пор, пока уровень не достигнет заданного значения. В данном примере уровень жидкости является регулируемой величиной, а закалочный бак, в котором регулируется уровень, – объектом регулирования. Следовательно, операция поддержания равенства регулируемой величины ее заданному значению является регулированием. Регулирование может осуществляться вручную и автоматически.
Рассмотрим принцип работы лабораторной нагревательной печи, подключенной к электросети через автотрансформатор. Пусть для измерения температуры в печи установлен термоэлектрический преобразователь (термопара), подключённый к милливольтметру. Лаборант, наблюдая за показаниями милливольтметра, регулирует напряжение на нагревательных элементах печи. Если температура в печи оказывается ниже заданной, он увеличивает напряжение на нагревательных элементах, отчего температура повышается; и наоборот, если температура повышается, то лаборант уменьшает напряжение на нагревательных элементах. Таким образом, лаборант, изменяя напряжение на нагревательных элементах, регулирует температуру. Такое регулирование называют ручным регулированием.
Для автоматизации процесса регулирования необходимо, чтобы какое-либо устройство непрерывно или периодически измеряло значение регулируемой величины, сравнивало с заданным значением и в случае несоответствия с помощью регулирующего органа корректировало технологический процесс, поддерживая заданное значение регулируемой величины. Такое регулирование, при котором управление осуществляется различными устройствами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измерительного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автоматическим регулятором.
Система автоматического регулирования (рис. 119) представляет собой совокупность отдельных элементов, направленно воздействующих друг на друга. В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением Х0.
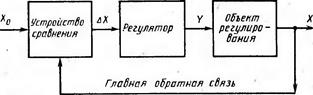
Рис. 119. Схема системы автоматического регулирования
В цепи главной обратной связи имеется инвертор, изменяющий знак сигнала X. В случае неравенства величин, поступающих на сравнивающее устройство, т. е. в случае рассогласования, на выходе задающего устройства появляется сигнал ΔХ = Х0 ‑ X, пропорциональный рассогласованию. Этот сигнал подается на вход регулятора. В регуляторе сигнал АХ преобразуется и усиливается по мощности до уровня, необходимого для управления исполнительным устройством. Исполнительное устройство в свою очередь воздействует на объект регулирования. При этом регулируемая величина X в результате регулирующего воздействия Y изменяется в сторону уменьшения отклонения ΔХ.
Рассмотрим несколько подробнее основные элементы системы автоматического регулирования.
Для установления текущего значения регулируемой величины X в системе имеются специальные элементы получения информации, которые называются измерительными элементами. Основная функция измерительного элемента – измерение регулируемой величины (температуры, давления, запыленности и т. п.) и ее преобразование в электрический, пневматический или гидравлический сигналы, удобные для подачи последующим элементам системы. Измерительными элементами, как правило, являются первичные преобразователи аналогового или дискретного действия.
Сигналы задающих органов (органов настройки), как и выходные величины измерительных элементов, могут иметь различную физическую природу. В связи с этим задающие органы могут быть электрическими, механическими, пневматическими и т. п. В, электрических регуляторах, где выходным является электрический сигнал, задающие органы выполняются в виде резисторов, реостатов или потенциометров. В механических, гидравлических и пневматических регуляторах задающие органы выполняются в виде винтов, пружин или неподвижных опор.
Элементы сравнения могут иметь различные схемы, определяемые природой сравниваемых сигналов. Например, при сравнении электрических сигналов используются такие элементы, как резисторы, конденсаторы и другие элементы, а при сравнении механических величин – рычажные устройства. Заметим, что сигнал рассогласования характеризуется не только величиной, но и знаком.
В большинстве регуляторов сигнал рассогласования обладает небольшой мощностью, и поэтому его усиливают до значения, позволяющего управлять или приводить в действие исполнительный механизм.
Усиление сигнала, осуществляемое в усилительных элементах, достигается изменением потока вспомогательной энергии, поступающей от усилителя к исполнительному механизму в соответствии со знаком и значением рассогласования.
Элементы автоматических устройств, использующие информацию о сигнале рассогласования (исполнительные элементы), предназначены для оказания регулирующего воздействия на объект регулирования с целью уменьшить рассогласования между текущими и заданными значениями регулируемой величины. В одних случаях это приводит к изменению потока энергии или топлива к регулируемому объекту (печи), в других – к изменению потока жидкости (закалочные баки), пара, воздуха, газа и т. п. Исполнительные элементы состоят из исполнительных механизмов и регулирующих органов.
Для улучшения характера переходных процессов системы автоматического регулирования и повышения качества регулирования в систему регулирования могут вводиться стабилизирующие элементы (дополнительная обратная связь). Введение этих элементов обусловлено тем, что регулируемая величина обычно не сразу достигает заданного значения, и, если не принимать специальных мер, регулирование затягивается, сопровождаясь колебаниями регулируемой величины относительно заданного значения. В отличие от главной обратной связи, которая связывает регулируемую величину с задающим устройством, дополнительные обратные связи передают воздействия с выхода какого-либо звена системы автоматического регулирования на вход любого предыдущего звена. Сигнал дополнительной обратной связи, подаваемый на вход, может либо складываться с входным сигналом (положительная дополнительная обратная связь), либо вычитаться из входного сигнала (отрицательная дополнительная обратная связь). В системах автоматического регулирования чаще всего используют отрицательную дополнительную связь.
В зависимости от характера воздействия дополнительная обратная связь подразделяется на жесткую и гибкую. Жесткая дополнительная обратная связь характеризуется передачей по ней на вход части полной выходной величины на протяжении всего времени регулирования.
Гибкая (упругая) дополнительная обратная связь (изодром) характеризуется передачей по ней на вход первой или второй производной от измерения выходной величины по времени. У гибкой дополнительной обратной связи сигнал на выходе существует только тогда, когда сигнал изменяется во времени. Таким образом, гибкая дополнительная обратная связь позволяет осуществлять регулирование входной величины по скорости и ускорению и тем самым значительно ускоряет процесс регулирования и улучшает его качество. Гибкая обратная связь начинает действовать только при изменении выходной величины, и ее действие прекращается после возвращения системы к установившемуся состоянию. В связи с этим иногда ее называют «исчезающей» обратной связью.
Системы автоматического регулирования могут основываться на трех принципах: регулирования по отклонению, регулирования по возмущению и комбинированном принципе регулирования, когда совмещаются принципы регулирования по отклонению и возмущению.
Принцип регулирования по отклонению заключается в том, что процесс регулирования осуществляется по значению регулируемой величины, которое сравнивается с заданным ее значением. При наличии сигнала рассогласования регулятор воздействует на объект, чтобы привести к равновесию регулируемую и заданные величины.
Принцип регулирования по возмущению состоит в том, что из нескольких возмущений, воздействующих на объект, выбирается одно и определяется его влияние на регулируемую величину. Возмущение воздействует с помощью управляющего устройства на регулирующий орган объекта управления. В системах регулирования по возмущению вместо измерения рассогласования в измерительном элементе регулятора измеряется возмущение. Недостатком подобной системы является то, что она компенсирует влияние только одного основного возмущения и не может предотвратить влияние на регулируемую величину других возмущающих воздействий, чаще всего неконтролируемых.
Комбинированные системы сочетают в себе оба рассмотренных принципа.
Системы автоматического регулирования классифицируются по разным признакам.
По виду применяемой энергии – электрические, пневматические, гидравлические и механические.
По виду структуры – обыкновенные и самонастраивающиеся.
По виду функциональной связи между входными и выходными величинами элементов, входящих в системы автоматического регулирования, последние делят на системы непрерывного и прерывистого действия. В системах непрерывного действия непрерывному изменению входных величин всех элементов соответствует непрерывное изменение выходных величин этих элементов.
Системы автоматического регулирования относятся к системам прерывистого (дискретного) действия, если непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует прерывистое изменение выходной величины этого элемента.
2. ОБЫКНОВЕННЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Обыкновенными системами являются стабилизирующие, программные и следящие системы автоматического регулирования.
Стабилизирующие автоматические системы предназначены для поддержания постоянного значения регулируемой величины в некоторых пределах с заданной точностью. Такие системы широко используются для стабилизации температуры в рабочем пространстве плавильных и термических печей, уровня жидкости в закалочном баке, разрежения в вакуумных печах и т. д.
Примером может служить автоматическая система стабилизации температуры в термостате (рис. 120), в котором тепловая энергия поступает от нагревательного элемента НЭ. Чувствительным элементом в схеме является контактный термометр КТ. При повышении температуры выше заданного значения возбуждается реле К, и его размыкающий контакт, включенный в цепь нагревательного элемента, размыкается. При понижении температуры реле К обесточивается, и нагревательный элемент включается.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|