- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Таблица 3 7 страница
4. Проводят три проверки составленной первичной модели. Цель первой проверки заключается в том, что исследуется природа включающего элемента на длительность включения. Включающий элемент является элементом длительного действия, если он не меняет своего знака во включающем периоде, и наоборот, кратковременного действия, когда меняет свой знак. Если в результате первой проверки будет установлено, что включающий элемент является элементом кратковременного действия, то первичную модель корректируют введением в нее самоблокировки, т. е. блокируют включающий элемент исполнительным или промежуточным элементом. Тогда скорректированная модель будет иметь вид
где х – блокировочный элемент.
В примере включающий элемент Е меняет свой знак во включающем периоде, следовательно, он является элементом кратковременного действия. Модель после корректировки будет иметь вид 
Суть второй проверки сводится к определению длительности действия выключающего элемента. Если выключающий элемент меняет свой знак в периоде включения, то он является элементом кратковременного действия, а если не меняет, то элемент длительного действии. Если в результате второй проверки будет установлена кратковременность действия выключающего элемента, то следует провести корректировку математической модели, полученной по результатам первой проверки. Корректировка осуществляется продлением действия выключающего элемента существующим элементом циклограмм либо вновь введенным. Скорректированная модель будет иметь вид
 (а)
(а)
или
 (б)
(б)
где n – существующий элемент циклограммы или вновь введенный. Выражение (а) используют, если корректировка модели по результатам первой проверки не проводилась, а выражение (б), если проводилась.
В примере выключающий элемент не меняет своего знака во включающем периоде, следовательно, он является элементом длительного действия, и модель, полученная по результатам первой проверки, остается без изменений, т. е. 
Третья проверка осуществляется для выявления ложных включений исследуемого элемента X во всей циклограмме. Сначала модель, полученная по результатам второй проверки, представляется в виде суммы слагаемых (если это возможно). Затем определяется значение суммарного весового коэффициента Кс для каждого из слагаемых математической модели или для модели в целом (если она не может быть представлена в виде суммы слагаемых). Для этого каждому элементу слагаемого (или модели) присваивается свой весовой коэффициент. Первому элементу присваивается значение весового коэффициента 20, второму – 21, третьему – 22, четвертому – 23 и т. д. Сумма этих коэффициентов равна значению суммарного весового коэффициента Кс. Однако следует помнить, что при суммировании весовые коэффициенты элементов, стоящие в модели со знаком инверсии, в сумму не входят.
В примере модель можно представить в виде слагаемых, т. е.  Присвоим весовые коэффициенты элементам каждого слагаемого:
Присвоим весовые коэффициенты элементам каждого слагаемого:
Тогда суммарный коэффициент для каждого слагаемого будет равен единице, т. е. Кс = 1, так элемент т имеет знак инверсии.
Теперь необходимо записать ряд весовых коэффициентов циклограммы для каждого слагаемого (или модели в целом). Коэффициенты пишут под каждой буквой циклограммы. Значение первого коэффициента зависит от того, с каким знаком приходят включающие и выключающие элементы к концу циклограммы, т. е. включенными или выключенными. Если они выключены, то в сумму первого коэффициента идет нуль и ряд начинается с нуля, а если включен хотя бы один, то в сумму идет значение коэффициента этого элемента. Получим:
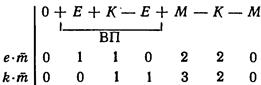
Значение суммарного весового коэффициента Кс должно встречаться только во включающем периоде. Наличие его в других тактах указывает на то, что там существуют ложные включения и математическая модель требует корректировки.
В примере значение суммарного весового коэффициента, равное единице, встречается только во включающем периоде. Следовательно, ложных включений элемента К нет, и модель не требует корректировки.
Корректировку математической модели по результатам третьей проверки проводят «опоясыванием» (блокированием) тактов, в которых встречаются ложные включения, или рабочих тактов. Если «опоясывают» ложные включения каким-либо элементом Р, то математическую модель, полученную по результатам второй проверки, следует умножить на р со знаком инверсии, т. е.

если «опоясывают» рабочие такты, то модель умножают на р без знака инверсии, т. е.
В качестве «опоясывающего» элемента может быть использован какой-либо элемент циклограммы, который включается до начала рабочих тактов (или ложных включений) и выключается после окончания рабочих тактов. Сформулированное правило касается и вновь введенных элементов.
Если для корректировки математической модели элемента X вводится новый элемент, то он по своей функции является промежуточным элементом, и для него необходимо проводить математическое моделирование. Поэтому всегда необходимо стремиться к тому, чтобы в первую очередь использовать элемент,
Рис. 107. Схема управления нереверсивным электродвигателем
уже имеющийся в циклограмме, и только при отсутствии необходимого элемента вводить новый.
5. Составляется обобщенная модель, которая представляет собой сумму математических моделей всех исполнительных и промежуточных элементов, каждая из которых умножена на соответствующий исполнительный или промежуточный элемент.
В примере один исполнительный элемент, поэтому обобщенная математическая модель будет иметь вид

6. Проводят минимизацию обобщенной модели и по минимизированной модели строят электрическую схему. При этом исходят из того, что знак умножения соответствует последовательному соединению элементов, а знак сложения – параллельному. Все элементы математической модели без знака инверсии эквивалентны замыкающим контактам, а со знаком инверсии – размыкающим.
Схема управления, рассмотренная в примере, приведена на рис. 107.
Контрольные вопросы и задания
1. Расскажите о классификации систем автоматического программного управления.
2. Как осуществляется управление в функции времени?
3. Как осуществляется управление в функции пути?
4. Расскажите о типовых пусковых контактах и дайте их характеристику.
5. Расскажите об интуитивном методе построения схем управления.
6. Расскажите об аналитическом методе схем управления.
7. Расскажите о действиях алгебры логики.
8. Расскажите о законах алгебры логики.
9. Изложите последовательность разработки схем аналитическим методом.
10. В чем заключается суть первой проверки математической модели, и как она проводится?
11. В чем заключается суть второй проверки, и как она проводится?
12. В чем заключается суть третьей проверки, и как она проводится?
ГЛАВА 12. АВТОМАТИЧЕСКАЯ БЛОКИРОВКА И ЗАЩИТА В СИСТЕМАХ УПРАВЛЕНИЯ
1. СИСТЕМЫ АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ
Под блокировкой подразумевается взаимосвязь элементов схемы управления, которая обеспечивает либо требования последовательного включения рабочих органов механизмов, либо безопасность обслуживающего персонала.
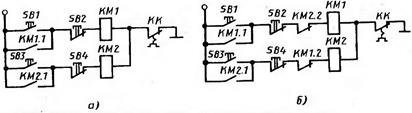
Рис. 108. Схемы управления реверсивным электродвигателем:
а – без исключающей блокировки; б – исключающей блокировкой
По функциональному признаку, т. е. по назначению, различают три вида блокировки: исключающую, разрешающую и блокировку памяти.
Исключающая блокировка – это такой вид блокировки, при которой включение одного элемента схемы исключает возможность включения другого, сблокированного элемента схемы. Исключающая блокировка осуществляется с помощью логического элемента НЕ. Например,  , т.е. если на вход какого-либо устройства подается сигнал а, то сигнал X отсутствует.
, т.е. если на вход какого-либо устройства подается сигнал а, то сигнал X отсутствует.
Исключающая блокировка находит широкое применение в схемах управления. На рис. 108 показаны две схемы управления реверсивным электродвигателем с помощью пусковых и стоповых кнопок. Первая схема (рис. 108, а) не содержит исключающей блокировки, а во второй схеме (рис. 108, б) она предусмотрена. При управлении электродвигателем с помощью первой схемы возможна аварийная ситуация. Если после пуска двигателя кнопкой SB1 нажать на пусковую кнопку SB3 или наоборот, то это приведет к срабатыванию магнитного пускателя КМ2 и, как следствие этого, к короткому замыканию в силовой цепи. Этого недостатка лишена вторая схема, так как в ней предусматривается исключающая блокировка. При нажатии на пусковую кнопку SB1 (рис. 108, б) возбуждается катушка магнитного пускателя КМ1 и, следовательно, размыкается блокировочный контакт КМ1.2. Если теперь нажать на пусковую кнопку SB3, короткое замыкание в силовой цепи не произойдет, так как катушка магнитного пускателя КМ2 не возбудится. Цепь будет разорвана контактом КM1.2.
Исключающая блокировка обязательно применяется для защиты генератора высокой частоты, если от него питаются несколько индукторов, суммарная мощность которых больше установочной мощности генератора, а также в ряде других схем.
Разрешающая блокировка – это такой вид блокировки, при котором включение одного элемента схемы управления разрешается только при выполнении определенного порядка. Разрешающая блокировка реализуется с помощью логических элементов И либо ИЛИ. Если f (Х) = a · b, то сигнал X появляется только тогда, когда имеются и сигнал а и сигнал b. Если же f (X) = а + b, то сигнал X появляется, когда имеется хотя бы один из сигналов (a или b).
Разрешающая блокировка находит широкое распространение в схемах управления бытовых устройств и промышленных установок. Например, нельзя включить телевизор, если не закрыта его задняя крышка. Лифт не пойдет, если не закрыта его дверь. В нагревательных электрических печах нельзя включить нагревательные элементы, если не закрыть дверки печей, и т. д.
Блокировка памяти – это такой вид блокировки, при которой кратковременное включение одного элемента схемы управления вызывает длительное включение другого элемента.
Блокировка памяти находит применение в схемах управления, когда пуск какой-либо установки осуществляется пусковой кнопкой с самовозвратом (пусковой контакт кратковременного действия). На схемах, изображенных на рис. 108, контакты КМ1.1 и КМ2.1 являются блокировочными контактами.
2. СИСТЕМЫ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ
Системой автоматической защиты называется совокупность элементов схемы управления, с помощью которой осуществляется контроль процессов в объекте управления, формирование сигналов в различных критических ситуациях и использование этих сигналов для предотвращения аварий путем остановки оборудования или переключения режима его работы, а также вызова обслуживающего персонала для выдачи ему информации о причинах возникновения и вида отклонений от нормальной работы.
Кроме отмеченных функций, вводимые в систему управления устройства защиты могут выполнять также функции защиты обслуживающего персонала от травматизма.
По назначению все системы автоматической защиты разделяются на четыре группы: системы предупредительной сигнализации; системы аварийного отключения и переключения оборудования; системы защиты обслуживающего персонала от травм; системы противопожарной защиты.
По физической природе входного сигнала устройства защиты делятся на электрические, гидравлические, механические, тепловые и др.
По числу контролируемых параметров различают системы защиты единичного и множественного контроля.
По числу выполняемых функций системы защиты делятся на однофункциональные и многофункциональные. Первые выполняют только одно действие (например, выключают электродвигатель при перегрузке). Многофункциональное устройство может кроме остановки электродвигателя включить сигнализацию или дополнительно выполнить какие-либо другие действия.
Системы автоматической защиты в большинстве случаев представляют собой разомкнутые системы, в состав которых входят следующие основные элементы: индикаторы аварийных ситуаций; усилительно-преобразующие устройства и элементы; исполнительные механизмы.
В индикаторе аварийных ситуаций текущее значение контролируемого параметра воспринимается первичным преобразователем (датчиком) и сравнивается с заданным значением. Именно в схеме сравнения происходят обнаружение признаков аварийной ситуации и формирование сигнала об этом событии.
Как правило, сигнал, полученный на. выходе индикатора аварийных ситуаций, обладает малой мощностью и не может непосредственно воздействовать на исполнительный механизм. В этих случаях сигнал предварительно подается на усилительно-преобразующее устройство, где сигнал может усиливаться, преобразовываться, а также стабилизироваться.
Сигналы индикатора аварийных ситуаций после усиления и преобразования приводят в действие исполнительные механизмы, которые предотвращают возможность аварии и оповещают обслуживающий персонал о ненормальных режимах работы оборудования.
В системах защиты, применяемых в сложных объектах, могут контролироваться сразу несколько параметров. В этом случае контроль осуществляется непрерывно или последовательно. При непрерывном контроле система защиты состоит из нескольких (по числу контролируемых параметров) параллельно включенных индикаторов аварийных ситуаций и усилительно-преобразующих элементов с одним исполнительным органом.
При последовательном контроле в одних и тех же индикаторах и усилительно-преобразующих элементах производится поочередная обработка исходной информации первичных преобразователей, поочередное включение которых осуществляется специальным переключателем.
К основным характеристикам устройств защиты относятся статические и динамические характеристики, чувствительность, инерционность, параметры и точность срабатывания, стабильность работы, способность к перегрузкам и надежность.
Статические характеристики выражают связь между входными и выходными параметрами в установившемся режиме, а динамические – в переходном, когда входные и выходные параметры изменяются во времени.
Инерционность определяется временем срабатывания, т. е. интервалом времени между моментами подачи на вход сигнала и выработки управляющего сигнала.
Точность срабатывания – разность между истинным значением и заданным значением контролируемого параметра, приводящая к срабатыванию устройства защиты.
Стабильность работы во времени определяется временными, температурными и другими интервалами, в пределах которых устройства могут нормально выполнять свои функции.
Способность к перегрузкам определяется максимальным значением контролируемого параметра и временем его действия, при которых устройства защиты не выходят из строя.
Надежность работы устройства защиты определяется рядом показателей, к числу которых относятся: вероятность безотказной работы в течение заданного интервала времени, средняя наработка на отказ и т. п.
Основными элементами индикаторов аварийных ситуаций являются первичные преобразователи, которые по конструкции и своим характеристикам практически не отличаются от первичных преобразователей, рассмотренных выше (см. гл. 2).
В устройствах защиты применяют стандартные схемы сравнения, усилители, преобразователи и исполнительные органы. Довольно часто в системах защиты используется исполнительный орган общей системы управления. Конструкции всех перечисленных элементов были рассмотрены выше.
В этом параграфе рассмотрены только те или иные индикаторы и сигнализаторы аварийных ситуаций.
На практике наибольшее распространение (в схемах управления оборудованием литейных и термических цехов) получили индикаторы аварийных ситуаций предельных положений, аварийных перемещений, предельных уровней жидкостей и сыпучих сред, аварийных деформаций и механических напряжений, аварийных сил и давлений, нарушений температурных режимов, погасания пламени топок, аварийной влажности, концентрации пыли и дыма, аварийных значений силы токов и напряжений, замыкания токоведущих шин на землю, систем защиты от травматизма и др.
Индикаторы предельных положений используют конечные (путевые) выключатели. Они устанавливаются таким образом, что срабатывают под действием подвижного элемента защищаемой системы при достижении им соответствующих точек контролируемого пути.
Индикаторы предельных уровней отличаются многообразием конструкций и принципов действия. Выбор типа индикатора зависит от физических свойств среды, уровень которой контролируется. Наибольшее распространение получили поплавковые и кондуктометрические индикаторы.
Индикаторы предельных деформаций и механических напряжений наиболее часто содержат тензометрические чувствительные элементы.
Индикаторы контроля статических и медленно изменяющихся сил обычно основаны на использовании динамометрических преобразователей с упругими элементами в виде пружин и колец. Для преобразования деформации в электрический сигнал применяют электроконтактные, потенциометрические или индуктивные первичные преобразователи.
Индикаторы аварийных давлений обычно имеют чувствительные элементы, подобные чувствительным элементам манометров (мембраны, сильфоны, трубчатые пружины и др.).
Индикаторы нарушений температурных режимов обычно базируются на чувствительных элементах, преобразующих тепловую энергию в электрический сигнал, т. е. различного типа термометры.
Индикаторы погасания пламени в топках контролируют наличие факела в камере сгорания нагревательной и плавильной печей, работающих на жидком или газообразном топливе. Подавая сигнал на отключение подачи топлива, индикаторы позволяют защищать печи от взрывов и других опасных последствий, которые могут возникнуть при погасании пламени. В таких индикаторах используются различные способы контроля наличия пламени: контроль за тепловыделением с помощью термочувствительного элемента; контроль за световым излучением, где используют фотоэлектрические преобразователи (фоторезисторы и фотоэлементы).
Весьма перспективными являются индикаторы в виде электронных датчиков, использующих ионную проводимость пламени. Так, через электроды датчика, введенные в зону факела, может протекать электрический ток с силой 2 ... 1200 тА.
Индикаторы дыма и пыли используются в системах противопожарной защиты, при контроле горения топлива, степени загрязнения окружающей среды и обнаружения недопустимых концентраций пыли в атмосфере цехов и помещений. Наиболее часто контроль осуществляется оптическими или радиоактивными методами по интенсивности излучения, поглощения или рассеивания частицами пыли и дыма.
Наиболее простыми защитными устройствами от перегрузок по току и коротких замыканий являются плавкие, предохранители.
Система защиты от производственного травматизма, который возможен при эксплуатации прессов, циркуляционных пил, механических фуганков и другого оборудования, останавливает машину при обнаружении приближения человека в опасной зоне. В этих случаях обычно применяют индикаторы на базе фотореле, которые срабатывают при прерывании светового барьера, ограждающего опасную зону. Кроме того, используют индикаторы генераторного типа, в качестве чувствительного элемента которого служит антенна. При приближении человека к антенне, подвешенной в опасной зоне, изменяется частота генератора. На выходе генератора появляется сигнал, который можно использовать для остановки оборудования. Генераторный индикатор может срабатывать на расстоянии 1 ... 100 см. Длина антенны может достигать 10 м.
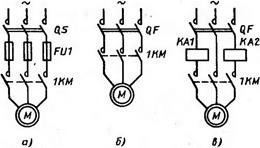
Рис. 109. Схемы защиты электродвигателя от коротких замыканий:
а – с помощью плавких предохранителей; б – с помощью автоматического выключателя; в – с помощью реле максимального тока
Для оповещения обслуживающего персонала о возникновении опасных ситуаций, а также о причинах и характере аномальных режимов работы применяется специальная сигнализация, которая осуществляется акустическими и визуальными средствами, конструкция которых будет рассмотрена в последующих параграфах (см. гл. 13).
Из большого числа различных систем аварийного отключения оборудования наибольшее распространение в литейных и термических цехах получили системы защиты электродвигателей от перегрузок и короткого замыкания, нулевая защита, защита при обрыве троллейных проводов и другие, принцип которых будет рассмотрен ниже.
Защита в схемах управления электроприводами предназначена для предотвращений повреждения электрооборудования. Устройство защиты устанавливают как в силовых цепях, так и в цепях управления. К основным видам защиты в электроприводе относятся: защита от короткого замыкания; максимальная защита, срабатывающая даже при кратковременном превышении установленного значения силы тока; защита двигателей от перегрузок, если сила тока длительно превышает ее номинальное значение; защита от перенапряжения, возникающего в электрических цепях.
Защита от короткого замыкания обеспечивает немедленное отключение цепи, в которой произошло короткое замыкание или чрезмерное увеличение силы тока. Защита осуществляется с помощью плавких предохранителей (рис. 109, а), автоматических выключателей с электромагнитными расцепителями (рис. 109, б) и тепловых реле (рис. 109, в).
Защита плавкими предохранителями трехфазной силовой цепи двигателя обладает большим недостатком. При перегорании одной из вставок двигатель будет работать на двух фазах, что приведет к его перегреву. Этого недостатка лишена защита автоматическими выключателями. При их срабатывании отключаются все три фазы питающего напряжения.
Защита двигателя от перегрузки током предназначается для предотвращения перегрева двигателя при продолжительном режиме работы. Для этого в цепи трехфазного двигателя включаются два однополюсных или одно двухфазное тепловое реле. Тепловые элементы (нагреватели) этих реле включаются в цепи двигателя, как правило, после главных контактов магнитного пускателя или контактора (рис. 110).
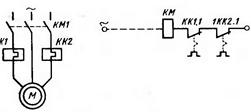
Рис. 110. Схемы защиты электродвигателя от длительных нагрузок с помощью тепловых реле
Защита от длительных перегрузок может также осуществляться и автоматами и тепловыми расцепителями.
Схема защиты от перенапряжения выполняется на реле максимального напряжения, катушка которого включается в измерительную электрическую цепь. Необходимость такой защиты возникает при питании электроприводов от отдельных генераторов или преобразователей.
Нулевая защита – это такой вид защиты, который исключает возможность самопроизвольного включения электродвигателя после исчезновения напряжения или чрезмерного его снижения. При управлении двигателем с помощью кнопок по схемам, приведенным на рис. 108, такую защиту осуществляют магнитные пускатели КМ1 и КМ2. В этих схемах после отключения магнитных пускателей, замыкающих контакты КМ 1.1 и КМ2.1, включение параллельно пусковых кнопок SB1 и SB3 при появлении напряжения на схеме не позволяет включаться магнитным пускателям, так как цепи включения катушек разомкнуты.
Если управление электроприводом "Осуществляется переключателем с фиксированным положением, то нулевая защита обеспечивается включением реле напряжения KV (рис. 111). Реле включается в исходном положении переключателем, становится на самопитание и через замыкающий контакт создает цепь питания магнитных пускателей КМ1 и КМ2. При срабатывании защиты для включения KV надо переключатель поставить в исходное положение «О». В цепи катушки реле KV находятся также контакты теплового реле КК.
Рис. 111. Схема нулевой защиты с реле напряжения
Рис. 112. Схема защиты при обрыве троллейных проводов
Система защиты при обрыве троллейных проводов служит для защиты обслуживающего персонала от поражения электрическим током. Троллейные провода предназначаются в цехах для подвода электроэнергии к мостовым кранам, кран-балкам и другим транспортным средствам.
При обрыве одного из троллейных проводов (рис. 112) между точками А и В возникает разность потенциалов и возбуждается промежуточное реле КА. Размыкающий контакт реле размыкает цепь (с управляющими контактами УК) управления контактора КМ, и троллейные провода обесточиваются прежде, чем оборванный провод долетит до пола цеха. Для повышения чувствительности схемы промежуточное реле включено в диагональ диодного моста.
Контрольные вопросы и задания
1. Расскажите о назначении исключающей блокировки.
2. Расскажите о назначении разрешающей блокировки.
3. Расскажите о назначении блокировки памяти.
4. Какие требования предъявляются к системам автоматической защиты?
5. Расскажите о структуре системы автоматической защиты.
6. Перечислите и дайте определения основных характеристик систем защиты.
7. Расскажите о классификациях систем автоматической защиты.
8. Расскажите об индикаторах аварийных ситуаций.
9. Какие виды сигнализации аварийного состояния применяются в настоящее время?
10. Расскажите о видах защиты в схемах управления электроприводами.
11. Расскажите о целях и видах нулевой защиты.
12. Дайте описание защиты при обрыве троллейных проводов.
ГЛАВА 13. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И СИГНАЛИЗАЦИИ
1. СТРУКТУРА И ВИДЫ СИСТЕМ
В современных литейных и термических цехах число контролируемых параметров технологических процессов становится настолько большим, что оператор не в состоянии следить за показаниями приборов и делать правильные выводы из получаемой информации. В связи с этим возникла необходимость в создании систем централизованного контроля, с помощью которых можно было бы осуществлять быстродействующий последовательный опрос состояния контролируемых величин, производить простейшую обработку и регистрацию получаемой информации.

Рис. 113. Схемы системы автоматического контроля:
а – невалансиой; б – балансное
Системы автоматического контроля предназначены для контроля параметров технологических процессов, сигнализации о нарушениях их нормального протекания, а также для контроля количества или качества обрабатываемых изделий.
Система автоматического контроля (рис. 113, а) представляет собой совокупность отдельных элементов, последовательно воздействующих друг на друга. Изменение контролируемого параметра в объекте контроля 1 воспринимается измерительным элементом – первичным преобразователем 2, который преобразует поступивший на его вход какую-либо физическую величину А в сигнал X, способный воздействовать на исполнительный элемент 3. Результат действия Y исполнительного элемента подается на воспроизводящий элемент 4, который записывает или показывает текущее значение контролируемого параметра.
В зависимости от функции воспроизводящего элемента системы автоматического контроля подразделяются на системы: измерения, сигнализации и сортировки (система контроля готовой продукции).
В автоматических измерительных системах воспроизводящий элемент указывает или регистрирует текущее значение контролируемого параметра. Как правило, эта система представляет собой прибор, предназначенный для одного параметра (температуры, давления, запыленности и т. д.).
Автоматическая сигнализирующая система используется для оповещения обслуживающего персонала о возникших отклонениях в контролируемом объекте путем подачи звуковых или световых сигналов. Системы автоматической сигнализации в зависимости от их назначения подразделяются на контрольные и предупредительные.
Автоматическая система сортировки осуществляет контроль обработанных изделий по их качественным и количественным признакам.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|