- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ВЫБОР РЕГУЛЯТОРА И РАСЧЕТ ЕГО НАСТРОЕК
ВЫБОР РЕГУЛЯТОРА И РАСЧЕТ ЕГО НАСТРОЕК
Выбор регулятора произведем с учетом качества регулирования заданного в задании на проектирование. Требуется «обеспечить регулирование без статической погрешности и с минимальным временем переходного процесса»
Так как необходимо регулирование с минимальным временем переходного процесса,то выбираю апериодический переходной процесс.
Регулирование без статической погрешности возможно только если в законе регулирования присутствует интегральная составляющая.Определим вид выходного сигнала регулятора
tо/То = 56.5/56,5 = 1. Вывод: допустимо использовать регулятор как с непрерывным выходным сигналом так и импульсного действия, т.к 1=1.
Рассчитаем предварительные значения настроек обоих регуляторов.
Для ПИ-регулятора:
Коэффициент усиления Кр= 
Время интегрирования Ти=0.8*tо+0,5*То=45.2+28.25=73.45с
Для ПИД-регулятора:
Коэффициент усиления Кр= 
Время интегрирования Ти=2.4*tо=2.4*56.5=135.6с
Время предварения Тп=0,4*tо=0,4*56.5=22.6с
Для окончательного выбора регулятора и определения его оптимальных настроек выполним моделирование САУ с выбранными регуляторами в программе «SAMSIM»
(Здесь располагается Ваша структурная схема)
Рис.1 Структурные схемы САУ с ..- и …-регуляторами
В результате моделирования и поиска оптимальных переходных процессов получены следующие процессы
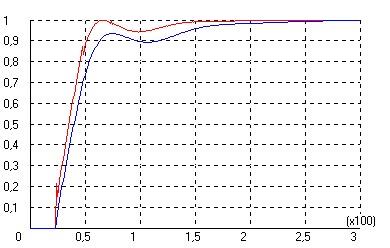
Рис.2 Переходные процессы в САУ
верхний график-система с …-регулятором,
нижний график – система с ..-регулятором
Настройки регуляторов и показатели качества регулирования представлены в таблице№2
Таблица №2
Таблица сравнения качества работы систем управления
| Парам. САУ
Состав САУ | Настройки регулятора | Типовой перех. процесс | Параметры переходного процесса | |||||
| Коэфф. усиления Кр | Время интегрир. Ти,с | Время дифф. Тд,с | Время рег-я Тр,с | Динам. погрешн. Dд | Статич. погр. Dс | Степень затухан. Y,% | ||
| САУ с ..-р. | ….. | …. | - | …… | … | …. | - | … |
| САУ с …-р. | …… | .. | … | … | …. | - | …. | |
Вывод: Окончательно выбираем для системы управления …-регулятор, так как (ввести обоснование в соответствии с требованием задания на проект.)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|