- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
- Затем осуществляется разработка принципиальной схемы управления электроприводом.
А)
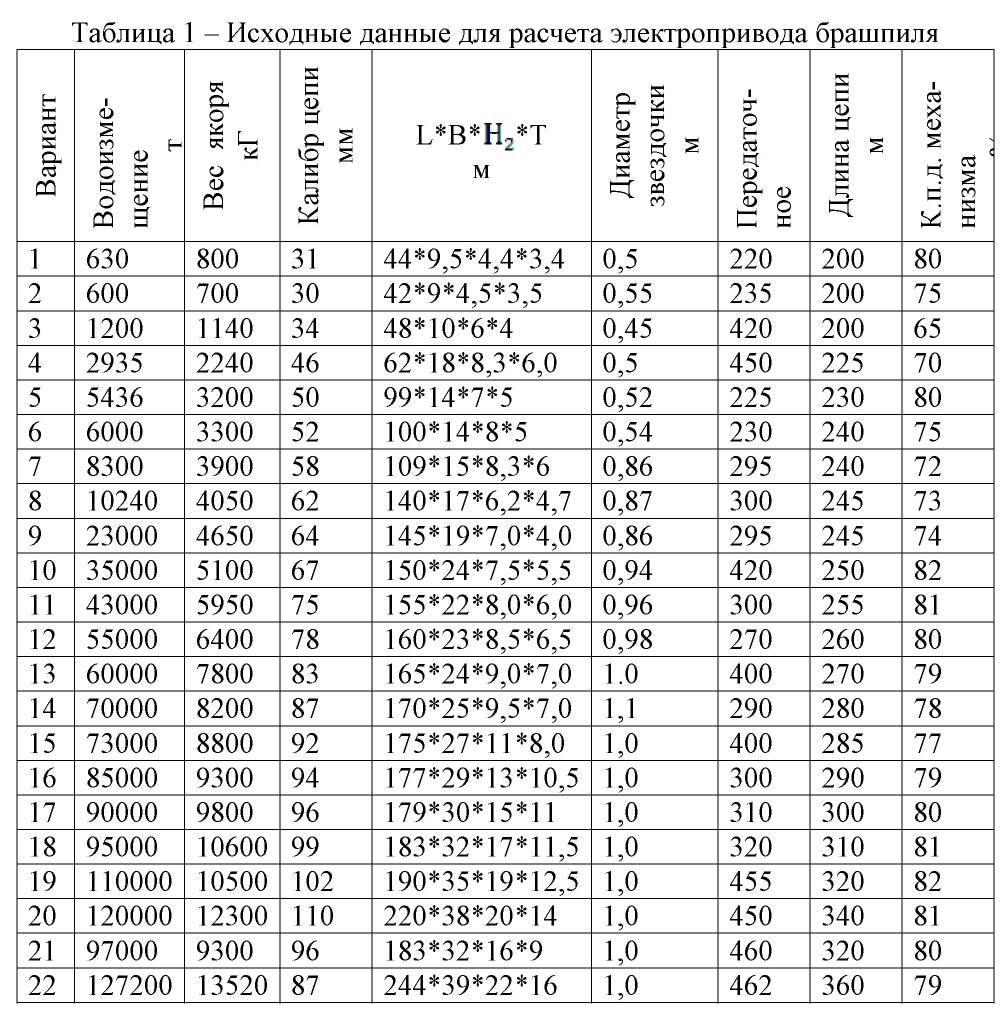
-Предварительный выбор ИД производится по нормам Правил Регистра и установленным практикой критериям.
Для выбора ИД по каталогу необходимо знать:
1. номинальный момент Мн,
2. номинальную частоту вращения nн,
3. продолжительность включения ПВ%. 40%
1. Номинальный момент должен быть установлен по следующим соображениям:
- по расчетному значению тягового усилия согласно Правил Регистра в зависимости от категории используемой якорной цепи
|
|

|
|
МН=(10499. 7*0. 45*1. 35)/(420*62)=
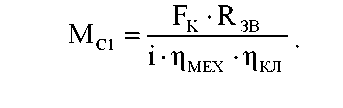
где FРЕГ- тяговое усилие якорной цепи по Правилам Регистра, RЗВ- диаметр звездочки, i - передаточное число механизма брашпиля, η МЕХ - к. п. д. механизма, η КЛ - к. п. д. клюза, fH = 1. 35 - коэффициент трения цепи в клюзе;
- отрыв якоря от грунта
|
|

Мн= Fотр=
где GЯ -вес якоря, Н – глубина якорной стоянки, КЯ-держащая сила якоря, q – вес погонного метра якорной цепи;
- подъем двух якорей с половины глубины якорной стоянки
|
|

- подъем свободно висящего якоря с полностью вытравленной якорной цепью

М
где L – общая длина якорной цепи; пусковой момент ИД должен превышать максимально возможный момент (превышение должно составлять 0. 5MH );
- максимальный момент ИД должен быть меньше 1/3 разрывного усилия якорной цепи.
По перечисленным выше соображениям определяется номинальный момент
ИД.
2. Частота вращения ИД (номинальная) определяется, исходя из заданной Правилами Регистра скорости (VЦ) выбирания якорной цепи – 10 м/мин

3. Продолжительность включения ПВ -40%
|
|
По полученным выше данным осуществляется выбор ИД по каталогу.
- Затем осуществляется разработка принципиальной схемы управления электроприводом.
При этом необходимо предусмотреть получение более высокой, по сравнению с номинальной, скорости вращения ИД для выполнения швартовных операций и малой скорости втягивания якоря в клюз (по Правилам Регистра ~ 1м/мин).
-Определяются механические характеристики ИД.
В)
Нагрузочная диаграмма позволяет осуществить проверку выбранного ИД. Для ее построения необходимо располагать механической характеристикой ИД, данными механической передачи, параметрами якоря и якорной цепи, основными разме-рениями судна. Для удобства построения нагрузочной диаграммы весь процесс съемки судна с якоря разбивается на четыре стадии, в пределах каждой из которых работа двигателя характеризуется определенным законом изменения момента на валу.
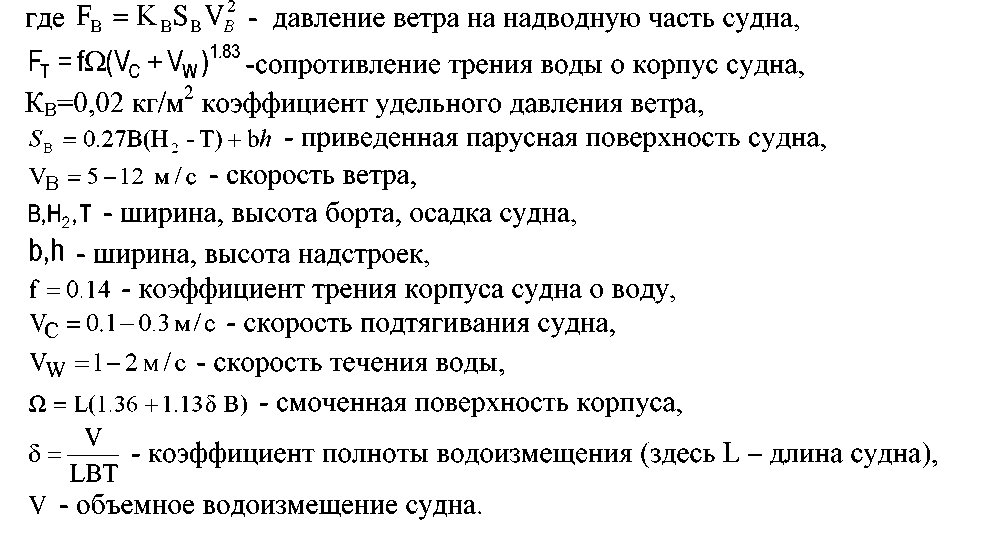
Первая стадия. Когда судно стоит на якоре, на него действуют силы ветра FB и течения FТ. Их равнодействующая FC относит судно от места заложения якоря и вызывает натяжение якорной цепи у клюза
|
|

Величина FC для наиболее тяжелых условий стоянки
|
|

|
|
Момент ИД в первой стадии, необходимый для выбирания свободно лежащей на грунте якорной цепи
По механической характеристике ИД определяется скорость вращения в пер вой стадии n 1.
Продолжительность первой стадии
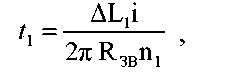
где Δ L1 -длина цепи, лежащей на грунте.
Скорость движения судна (подтягивание) под действием ИД
Вторая стадия. Расчет производится по методу последовательных интервалов. Для каждого интервала времени At полагается, что МС = const. Скорость выбирания якорной цепи
Длина цепной линии в конце промежутка Δ t
Скорость движения судна 
где  -горизонтальная составляющая натяжения цепи у клюза,
-горизонтальная составляющая натяжения цепи у клюза,
D - водоизмещение судна, g = 9. 81 м/с2. Натяжение цепи на клюзе
где aj - параметр цепной линии. Момент на валу ИД
Расчет ведется до того момента времени, когда цепная линия превратится в прямую, т. е. когда 

Где Xj - проекция цепной линии на горизонтальную ось.
На второй стадии съемки судна с якоря натяжение у клюза изменяется от F1 до F3 (натяжения у клюза на первой и третьей стадиях). Для упрощения расчета можно принять, что натяжение изменяется по линейному закону.
Третья стадия. Натяжение якорной цепи возрастает, цепь принимает форму прямой линии. Расчет нагрузочной диаграммы производится также методом после довательных интервалов. В качестве исходных данных принимается положение судна и параметры цепи в конце второй стадии.
|
|
Для каждого интервала Δ t находится расстояние по горизонтали до места заложения якоря
длина цепи за клюзом
длина выбранной цепи за время At
средняя скорость вращения двигателя
По механической характеристике двигателя определяется момент двигателя Mj, после чего находится значение натяжения цепи у клюза
Далее находится горизонтальная составляющая натяжения цепи для j-го интервала
Скорость судна к началу следующего интервала
Расчет третьей стадии заканчивается при Lj =H. Продолжительность третьей стадии определяется как сумма интервалов времени
Четвертая стадия. Нагрузочная диаграмма изменяется по прямолинейному закону и строится по двум точкам соответствующим началу и окончанию стадии
|
|
| Продолжительность четвертой стадии |
|
|
По механической характеристике двигателя определяется n нач, n кон, а затем средняя скорость вращения двигателя в этой стадии
По полученным данным строится нагрузочная диаграмма электропривода при съемке судна с якоря ( рисунок 3. 1).
По нагрузочной диаграмме производится:
-проверка исполнительного двигателя на нагрев и определяется продолжительность съемки судна с якоря.
-полученное значение сравнивается со временем, установленным Регистром.
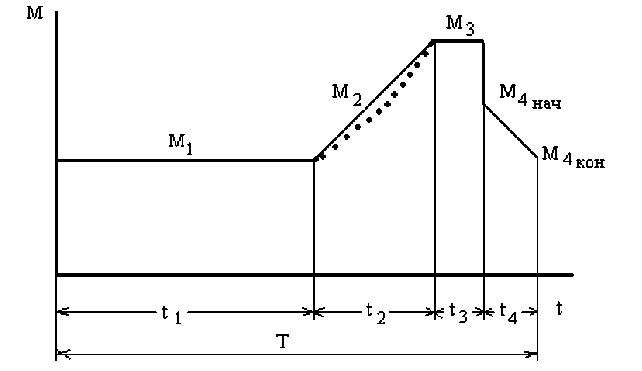
Рисунок 3. 1 – Нагрузочная диаграмма для случая сьемки судна с якоря Проверка на нагрев может быть выполнена по среднеквадратичному моменту.

Условие соответствия двигателя допустимому превышению температуры Мэкв < Mн.
ОФОРМЛЕНИЕ КУРСОВОГО ПРОЕКТА
Все материалы по курсовому проекту представляются в виде пояснительной записки, выполняемой на листах формата А4, и графического материала на одном листе формата А1.
Пояснительная записка должна содержать:
—требования Правил Регистра к электроприводу;
—обоснование выбора рода тока и величины напряжения;
—назначение, анализ условий и режимов работы устройства;
—расчет, выбор основных параметров и элементов электропривода;
—обоснование выбора принципиальной схемы управления электроприводом;
—нагрузочная диаграмма электропривода для основного режима работы устройства;
—результаты проверки выбранного ИД;
-выводы.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Судовые электроприводы: Справочник/ А. П. Богословский и др.: - Л.: Судостроение, 1983. - 384 с.
2. Сиверс П. Л. Судовые электроприводы/П. Л. Сиверс-М.: Транспорт, 1975. -451с.
3. Бабаев А. М. Автоматизированные судовые электроприводы /А. М. Бабаев, В. Я. Ягодкин–М.: Транспорт, 1986. -346с.
4. Чекунов К. Я. Судовые электроприводы и электродвижение су-дов/К. Я. Чекунов – Л.: Судостроение, 1986. - 350 с.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|