- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
5.2.Сборка модели. 5.3.Програмное обеспечение
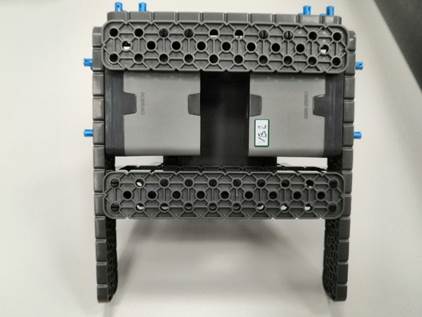
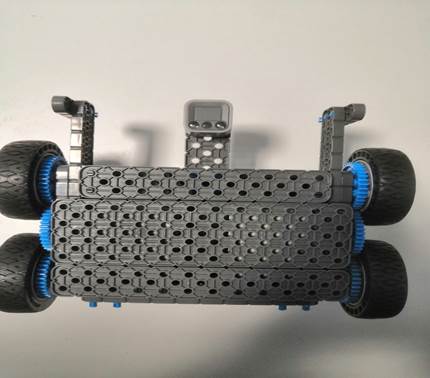
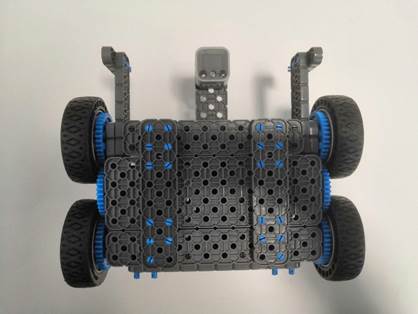
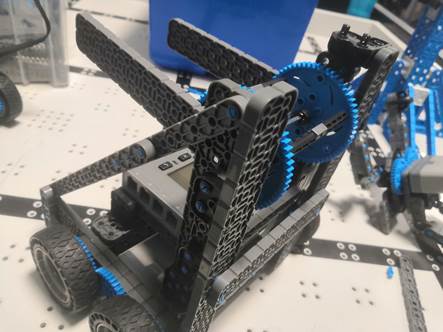
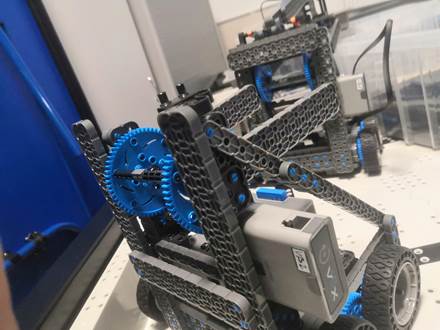
5. 2. Сборка модели
Сборка основной части конструкции (см.: 1, 2, 3, 4, 5, 6, 9, 10, 11, 12, 14, 15, 16)
Обеспечиваем конструкцию движущей частью(см.: 7, 8, 13)
1. 
2. 
3. 
4.  5.
5. 
6. 
7. 
8. 
9. 
10. 
11. 
12. 
13. 
14. 
15. 
16. 
5. 3. Програмное обеспечение
Управление движением робота реализовано с использованием двухмерного джойстика: переключатели включают соответствующие движения робота.
Если при движении робота перед ним возникнет препятствие, то в зависимости от программы и поставленной задачи робот может останавливаться, используя датчик расстояния.
Управление джойстиком:
#pragma config(Motor, motor2, leftMotor, tmotorVexIQ, PIDControl, reversed, encoder)
#pragma config(Motor, motor4, rightMotor, tmotorVexIQ, PIDControl, encoder)
#pragma config(Motor, motor10, armMotor, tmotorVexIQ, PIDControl, reversed, encoder)
#pragma config(Motor, motor11, clawMotor, tmotorVexIQ, PIDControl, reversed, encoder)
//*!! Code automatically generated by 'ROBOTC' configuration wizard !! *//
task main()
{
int threshold=10;
static int leftSpeed=0;
static int rightSpeed=0;
while(true)
{
int A = getJoystickValue(ChA);
int D = getJoystickValue(ChD);
displayCenteredBigTextLine(0, " ChA = %d", A);
displayCenteredBigTextLine(3, " ChB = %d", D);
leftSpeed = A/2;
rightSpeed = D/2;
if(leftSpeed> threshold||leftSpeed< -threshold)
{
setMotorSpeed(leftMotor, leftSpeed);
}
else
{
setMotorSpeed(leftMotor, 0);
}
if(rightSpeed> threshold||rightSpeed< -threshold)
{
setMotorSpeed(rightMotor, rightSpeed);
}
else
{
setMotorSpeed(rightMotor, 0);
}
if(getJoystickValue(BtnLUp)==1)
{
setMotorSpeed(armMotor, -127);
}
else if(getJoystickValue(BtnLDown)==1)
{
setMotorSpeed(armMotor, 127);
}
else
{
setMotorSpeed(armMotor, 0);
}
if(getJoystickValue(BtnRUp)==1)
{
setMotorSpeed(clawMotor, -127);
}
else if(getJoystickValue(BtnRDown)==1)
{
setMotorSpeed(clawMotor, 127);
}
else
{
setMotorSpeed(clawMotor, 0);
}
}
}
******************************
#pragma config(Sensor, port3, colorSensor, sensorVexIQ_ColorHue)
//*!! Code automatically generated by 'ROBOTC' configuration wizard !! *//
task main()
{
while(true)
{
int Green = getColorGreenChannel(port3);
int Red = getColorRedChannel(port3);
int Blue = getColorBlueChannel(port3);
float avg = (Green+Red+Blue)/3;
// displayCenteredBigTextLine(0, " Green = %d", Green);
// displayCenteredBigTextLine(2, " Red = %d", Red);
// displayCenteredBigTextLine(4, " Blue = %d", Blue);
if(Blue< avg & & Red> avg & & Green< avg)
{
displayCenteredBigTextLine(0, " Red" );
}
else
{
displayCenteredBigTextLine(0, " Blue" );
}
}
}
*****************************************
task main()
{
int i=0;
while (1)
{
i=vexRT[BtnLUp]+2*vexRT[BtnRUp]+8*vexRT[BtnRDown]
switch(i)
{
case 0:
move(0, 0, 2);
break;
case 1:
move (0, 127, 2
}
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|