- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Система захвата фигур. Результаты
Система захвата фигур
Особого внимания, на мой взгляд, заслуживает конструкция системы захвата фигур. Самым очевидным решением здесь было сделать две двигающихся навстречу щёчки под управлением сервопривода. Что-то вроде этого:
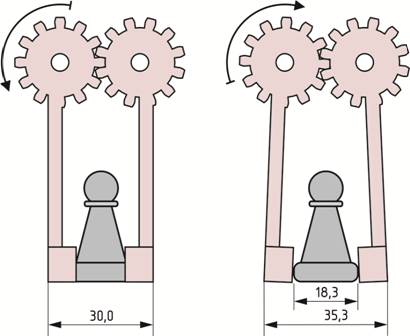
Как можно понять из рисунка, то для комплекта совсем не больших фигур с диаметром основания 18 мм нужно делать клетку шахматной доски почти в два раза больше, и размер доски также получается неоправданно огромным. После Нескольких неудачных реализаций такого варианта я наткнулся на такую необычную вещь, которая носит название «гибкий цанговый захват»), и выглядит она следующим образом:
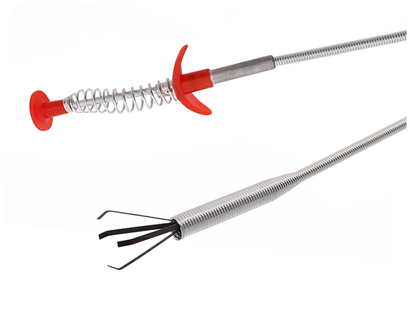
То есть это гибкий полый внутри стержень с небольшой металлической подпружиненной клешнёй на конце, которая закрывается, если её сдавить по бокам. А при отсутствии давления клешня мгновенно открывается. Разломав такой захват, на его основе я сделал свою систему захвата фигур. Металлическую клешню сдавливает кольцо, которое прикреплено к зубчатой рейке, приводимой в движение сервоприводом.


Результаты
Работа над проектом продолжается, и результаты тоже постепенно улучшается. На данный момент робот может отыграть партию, не ограниченную количеством ходов, как за чёрных, так и за белых. При этом не будет ошибок ни в работе механики, ни программной части системы. Играет он, кстати, не особо сильно, на уровень третьего разряда, это легко поправляется заменой шахматного движка. Данного робота я демонстрировал на выставке «Архимед-2016», где он практически без остановки играл с разными людьми 6 часов подряд и достойно выдержал такой тест драйв.
На этом всё, надеюсь, вам был интересен этот проект. В нём, конечно есть свои недостатки/особенности реализации, так что ещё есть куда стремиться, что совершенствовать и что развивать. Буду рад любым советам, вопросам и пожеланиям в комментариях.
Использованные компоненты:
1. телефон со специальным приложением
2. видеокамера телефона,
3. манипуляторы,
4. сероприводыDynamixel,
5. захват Actobotics,
6. стол,
7. шахматы.
Источник: https: //habr. com/ru/post/392065/
Видеообзор: https: //www. youtube. com/watch? v=tmG-FJrXAj8
Видео: партия с роботом https: //youtu. be/S_Ln_YswGVY
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|