- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Программная часть. Манипулятор
Программная часть
Вся эта композиция управляется одним небольшим Android-приложением. На него ложится много задач: Определение фигур на доске, расчёт углов для манипулятора, работа с шахматным движком, также реализовано пара голосовых сообщений робота по типу «Я поставил вам шах! » и «Спасибо за игру! ». Но при всём этом интерфейс приложения уместился в один экран.
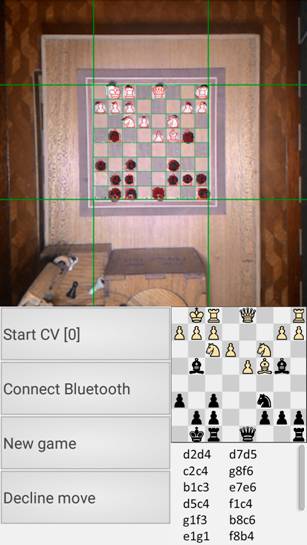
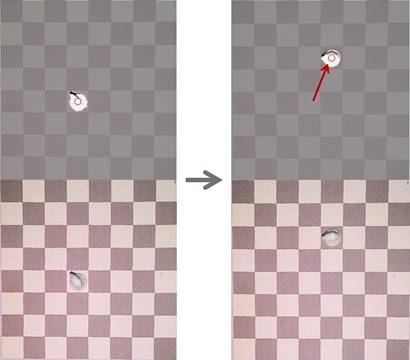
Система технического зрения реализована довольно просто. С ракурса телефона нет особой разницы между, скажем, королём и конём — визуально обе эти фигуры будут выглядеть как чёрные и белые кружки. Поэтому система не знакомится с увиденной ею позицией каждый раз заново, а запоминает последовательность всех сделанных ходов. А сделанный ход определить очень просто: если в какой-то момент времени программа видит, что в одной клетке фигура пропала, а в другой появилась, то это и будет считаться ходом. Примерно так это и работает.
Такой вариант технического зрения реализован исключительно через Android API, без использования OpenCV или чего-то похожего. Это не то чтобы правильно, причина здесь — личный интерес реализовать всё практически с нуля.
Манипулятор
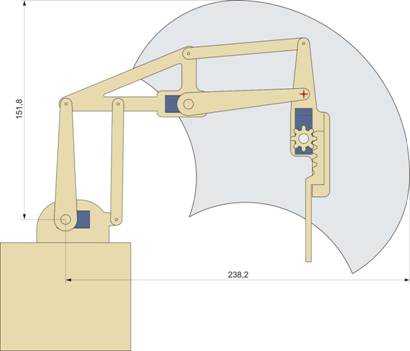
Очень много творческих поисков ушло на то, чтобы придумать такую конструкцию манипулятора, которая может достойно выполнять свою работу с имевшимися у меня в большом количестве дешёвыми китайскими сервоприводами TowerPro sg-90, которые не отличаются высоким качеством работы. Поэтому оба плеча манипулятора выполнены в виде параллелограммов, это позволяет системе захвата фигур всегда оставаться в вертикальном положении. Это, в свою очередь, лишает необходимости добавлять ещё один сервопривод, следовательно, в системе будет меньше погрешностей, позволяет ей быть легкой и надёжной. Так как шестерёнки тоже сделаны из дерева, то трудно добиться высочайшего качества их работы, поэтому для компенсации люфтов манипулятор перед каждым ходом делает движение в бок, чтобы подходить к каждой точке с одной стороны.
Что касается питания, то его робот его получает от двух плат из обычных зарядок для телефона, которые благополучно расположились в корпусе. Одна зарядка питает сам контроллер вместе с Bluetooth-модулем, другая — непосредственно механику. Для того чтобы сделать освещение, была разобрана светодиодная лампочка. Как оказалось, внутри неё находится две платы: на одной расположились светодиоды, на другой — преобразователь питания. Одна крепится на кронштейне, другая помещается в корпус коробочки. Всё питание выведено на небольшую панельку на боковой стороне корпуса коробочки:

Ещё одна картинка, на которой показана рабочая область манипулятора для отмеченной на нём красной точки. Для нулевой оси диапазон углов составляет 180°.
Сделать такого робота у меня получилось не сразу, некоторые прототипы работали весьма плохо, а некоторые сгодились для другой работы. Например, робот в видеоролике ниже кладёт сахар в кружку и помешивает чаёк.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|