- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Идентификация.
Пусть описание динамической системы имеет уже знакомый вид
- для непрерывного времени:  ,
,
- для дискретном времени:  .
.
Рассмотренную ранее задачу моделирования можно сформулировать так.
Дано:
« график входной функции  , передаточная функция
, передаточная функция  или
или  необходимо построить график выхода
необходимо построить график выхода  ».
».
Новая задача идентификации формулируется «альтернативно»
Даны:
«графики входа и выхода:  ,
,  необходимо определить параметры передаточной функции или
необходимо определить параметры передаточной функции или  .
.
Как следует из приведённых определений, идентификация – есть обратная задача по отношению к моделированию, когда ищется не процесс , а оператор или по выборке данных о входо-выходных состояниях , контролируемого объекта.
Приведём универсальный алгоритм решения задачи идентификации (оценивания) неизвестных параметров 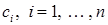 по методу наименьших квадратов (МНК) на примере регрессионной модели объекта
по методу наименьших квадратов (МНК) на примере регрессионной модели объекта  - ого порядка вида
- ого порядка вида
(1)  ,
,
где  случайная функция с нулевым средним (помеха измерений). Алгоритм идентификации строится на основе обработки данных контроля, функции выхода
случайная функция с нулевым средним (помеха измерений). Алгоритм идентификации строится на основе обработки данных контроля, функции выхода  и входных регрессионных переменных
и входных регрессионных переменных  , на временном отрезке дискретных измерений
, на временном отрезке дискретных измерений  .
.
Для модели объекта представленного в виде (1) метод наименьших квадратов сводится к составлению на основе данных измерений и решению системы линейных алгебраических уравнений вида
 .
.
Данная система имеет более компактную векторно-матричную форму записи
(2)  ,
,
где  вычисляемый вектор оценок искомых (неизвестных) параметров
вычисляемый вектор оценок искомых (неизвестных) параметров  , а
, а
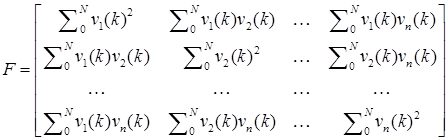 ,
, 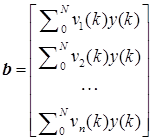
матрица и вектор, формируемые по данным измерений.
Решение систем вида (2) размерности более двух (  ) в ручную – трудоёмкий процесс. На практике решения реализуются машинным способом посредством стандартных компьютерных программ.
) в ручную – трудоёмкий процесс. На практике решения реализуются машинным способом посредством стандартных компьютерных программ.
В рамках нашего курса необходимо уметь составлять матрицу и вектор по приближённой оцифровке графиков пары  , для заданной передаточной функции или с неизвестными (искомыми) параметрами.
, для заданной передаточной функции или с неизвестными (искомыми) параметрами.
Пример решения задачи идентификации неизвестных параметров  и
и  модели объекта, заданного передаточной функцией в непрерывном времени
модели объекта, заданного передаточной функцией в непрерывном времени
(3) 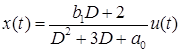
по данным контроля процессов о входо-выходных состояниях объекта, измеренных и внесённых в таблицу с период квантования  .
.
Таблица 1. Исходные данные контроля состояния системы.

| ||||||||

| -1 | -1 | -1 | -1 | ||||

| 0, 5 | 0, 4 | 0, 5 | 0, 8 | 1, 08 | 1, 1 | 0, 65 | -0, 7 |
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|