- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
3.5. Модель точки. 3.5.1. Общий случай
3. 5. Модель точки
На рис. 55, 57, 59, 61, 63 плоские изображения трехмерного объекта построены с помощью линий. Каждая линия – это множество точек, которые ограничивают линию, превращая ее в отрезок или дугу. Работая с этими изображениями, приходится выделять на линиях точки. В связи с этим необходимо знать, как строится модель точки, какие задачи нужно решать при работе с этой моделью. Поэтому рассмотрим процедуру возникновения модели точки, построенной методом двух изображений, и приемы решения задач, которые необходимо решать, работая с этой моделью.
3. 5. 1. Общий случай
Возьмём произвольную точкуА трехмерного пространства и построим её модель, используя метод двух изображений (рис. 45).
Плоскость α – плоскость в пучке проецирующих плоскостей с осью u. Прямые а1 и а2 называются линиями связи, а прямые m1 и m2 – проецирующими прямыми.
Аналогично возникают изображения любой другой точки трёхмерного пространства. Множество таких точек М, N... и исключенная прямая uпорождают пучок проецирующих плоскостей (рис. 46). Эти пучки рассекаются картинами по пучкам прямых – линиям связи с вершинами в исключенных точках U1 и U2.
Таким образом, моделью точки трёхмерного пространства является два её изображения (проекции), расположенные на соответствующих линиях связи.
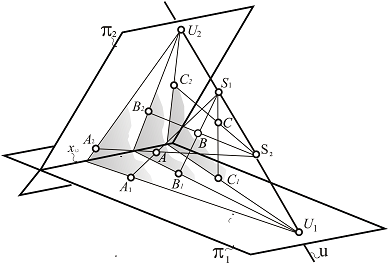
Рис. 45. Моделирование точек трехмерного пространства
Алгоритм этой процедуры составят следующие операции:
1) A  u =
u =  – проецирующая плоскость;
– проецирующая плоскость;
2) α  π 1= а1 – линия связи;
π 1= а1 – линия связи;
3) α π 2=a2 – линия связи;
4) А S1 = m1 – проецирующая прямая;
5) А S2 = m2 – проецирующая прямая;
6) m1 а1 = A1 – первая проекция точки A;
7) m2 a2 = A2 – вторая проекция точки A.
Докажем, что такая модель является однозначной, т. е. сохраняет всю геометрическую информацию исходной точки. Такой информацией будет только положение в пространстве, так как точка не имеет ни размеров, ни формы. Для этого через центры проецирования (S1, S2) и изображения точки (A1, A2) достаточно провести проецирующие прямые, которые, пересекаясь, восстановят положение исходной точки в исходном пространстве. Кроме того, если сравнить размерность исходного и картинного пространств, то она окажется одинаковой. Действительно, на выделение одной точки из множества точек трехмерного пространства затрачивается три параметра и на выделение пары точек, которые принадлежат соответствующим лучам двух пучков, – также три параметра: один параметр тратится на то, чтобы выделить один луч в пучке прямых, другой – на выделение на этом луче проекции исходной точки, еще один параметр нужно затратить, чтобы выделить на другом луче другую проекцию точки.
Исключением из этого правила окажутся точки, принадлежащие прямой u. Моделью любой точки этой прямой будут только точки U1 и U2. Поэтому прямая названа исключенной, а точки U1, U2 – исключенными.
Полученная модель, как было доказано, однозначна, но не удобна в работе, так как представляет собой громоздкую конструкцию, состоящую из двух плоскостей. Для устранения этого неудобства был предложен переход к однокартинному чертежу. Он заключается в перепроецировании изображений с одной картины на другую из дополнительного центра, который, в частности, может совпадать с одни из заданных центров проецирования
Для каждого из частных случаев метода двух изображений, о которых будет сказано ниже, предлагается свой конкретный переход к однокартинному чертежу. В итоге во всех случаях возникает совмещенная картинная плоскость, каждая точка которой является представителем двух точек различных картин. Поэтому появилась необходимость приписывать индексы проекциям точек, которые показывают первоначальную принадлежность той или иной картине. При этом, после совмещения тождественно совпадают исключенные точки и линии связи. Двойные элементы, имеющие один и тот же символ, но разные индексы, помечаются двойным индексом.
В результате плоской моделью точки трехмерного пространства окажется две ее проекции, которые располагаются на двойной линии связи, проходящей через двойную исключенную точку.
Работа с моделью точки заключается в решении следующих задач:
1) построение модели любой точки трёхмерного пространства;
2) определение положения точки относительно проекционного аппарата по её модели.
В сущности, решение этих задач сводится к установлению принадлежности точки к одной из групп, на которые делятся точки исходного пространства. Основанием для такой классификации служит положение точки относительно проекционного аппарата. В результате выделяются следующие группы точек:
1. Точки частного положения:
a) принадлежащие картинам π 1, π 2;
b) бесконечно удаленные;
c) принадлежащие нейтральной плоскости.
2. общего положения – все остальные.
Работа с моделью точки обеспечивается системой знаний, представленной в идее схемы на рис. 46. Для построения модели любой точки трехмерного пространства, необходимо знание устройства проекционного аппарата и алгоритм его работы. Для определения положения точки по отношению к проекционному аппарату необходимо умение провести процедуру обратную той, которая позволяет построить модель. Эту процедуру облегчает знание характерных признаков моделей точек частного положения.
Рассмотрим решение обеих, выше указанных задач, на примере моделирования точек общего и частного положения в перспективе, аксонометрии и на эпюре Монжа.
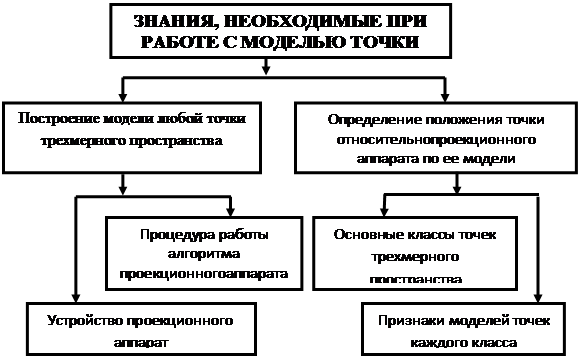 |
Рис. 46. Знания, необходимые при работе с моделью точки
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|