- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Передаточной функцией системы (звена) W(p) называется отношение изображения по Лапласу выходной величины к изображению по Лапласу входной величины при нулевых начальных условиях.
Лекция 4. Передаточные функции систем автоматического управления
Работу любой САУ можно описать с помощью дифференциального уравнения. Оно является линейным уравнением и определяет линейную модель системы:
 (3. 4)
(3. 4)
Отметим, что использовать линейную модель для исследования системы можно только при малых отклонениях переменных и поэтому часто говорят, что результаты исследований, полученных при использовании линейной модели справедливы только в малом.
Сложность решения дифференциальных уравнений высокого порядка без применения вычислительной техники и невозможность на основании численных решений создать общие методы анализа и синтеза систем привели к широкому использованию методов, связанных с применением математического аппарата преобразований Лапласа и Фурье. Эти методы и составили сущность так называемой классической теории автоматического управления.
Необходимо отметить, что существуют нелинейные функции, которые невозможно линеаризовать по методу малого отклонения и, в этих случаях, используют специальные методы, разработанные для исследования нелинейных систем.
Понятие передаточной функции системы является основополагающим в классической теории автоматического управления, к изучению основ которой мы и приступаем. Определение передаточной функции связано с преобразование Лапласа и поэтому вначале приведем некоторые основные сведения из этого преобразования.
При использовании преобразования Лапласа некоторой функции времени x(t) ставится в однозначное соответствие функция X(p), где p – оператор Лапласа. Функция времени x(t) называется оригиналом, а функция X(p) ее изображением. Изображение и оригинал связаны соотношением
Приведем некоторые теоремы преобразования Лапласа, которые будут использованы при изложении курса.
1. Теорема линейности. Для любых действительных или комплексных

Знак Þ означает соответствие изображения оригиналу.
2. Теорема запаздывания. Для любого постоянного t > 0

3. Теорема дифференцирования оригинала. Если  то
то

Применив эту теорему к производным высших порядков, получим
 (4. 1)
(4. 1)
При нулевых начальных условиях выражение (4. 1) упрощается:
4. Теорема интегрирования оригинала. Если  и
и  то:
то:
5. Теорема о начальном значении оригинала.
6. Теорема о конечном значении оригинала.
Перейдем к определению передаточной функции. Пусть система или какое-либо звено ее описываются дифференциальным уравнением вида (3. 4). Полагая начальные условия нулевыми, перейдем в этом уравнении к изображениям по Лапласу. В соответствии с теоремой 3 получим

 .
.
Вынесем в полученном выражении за скобки изображения переменной и входного воздействия и сделаем обозначения


С учетом этих обозначений исходное дифференциальное уравнение в изображениях по Лапласу получит вид:

Определим теперь зависимость выходной величины от входного воздействия:

Передаточной функцией системы (звена) W(p) называется отношение изображения по Лапласу выходной величины к изображению по Лапласу входной величины при нулевых начальных условиях.
Требование нулевых начальных условий не вносит принципиальных трудностей. В случае x(0)(k)¹ 0, при переходе к изображениям используют теорему 3, переносят члены, соответствующие начальным условиям в правую часть уравнения и считают их возмущающими воздействиями, относительно которых получают передаточные функции.
Будем полагать, что все элементы в схеме замкнутой САУ (рис. 4. 1) описываются уравнениями вида  (3. 4). Некоторым исключением в данном случае является уравнение объекта управления, в правую часть которого необходимо добавить оператор
(3. 4). Некоторым исключением в данном случае является уравнение объекта управления, в правую часть которого необходимо добавить оператор  определяющий возмущающее воздействие. В соответствии с принципом суперпозии, справедливым только для линейных систем, уравнение объекта управления в изображениях по Лапласу при нулевых начальных условиях запишется в виде
определяющий возмущающее воздействие. В соответствии с принципом суперпозии, справедливым только для линейных систем, уравнение объекта управления в изображениях по Лапласу при нулевых начальных условиях запишется в виде

В этом выражении 
Тогда можно записать
 передаточная функция объекта управления по регулирующему воздействию.
передаточная функция объекта управления по регулирующему воздействию.
 передаточная функция объекта управления по возмущению. Аналогично для других элементов схемы запишем
передаточная функция объекта управления по возмущению. Аналогично для других элементов схемы запишем
 передаточная функция логико-вычислительной подсистемы;
передаточная функция логико-вычислительной подсистемы;
 передаточная функция исполнительной подсистемы;
передаточная функция исполнительной подсистемы;
 передаточная функция цепи обратной связи (информационно-измерительной подсистемы).
передаточная функция цепи обратной связи (информационно-измерительной подсистемы).
| Xf(p) |
| F(p) |
| Wof(p) |
| Y(p) |
| E(p) |
| W1(p) |
| U(p) |
| W2(p) |
| R(p) |
| W0(p) |
| X1(p) |
| X(p) |
| Wос(p) |
| Y1(p) |
| - |
Рис. 4. 1. Структурная схема САУ.
поменять G(p) на Y(p)
Схема системы автоматического управления, изображенная в виде соединения передаточных функций составляющих ее звеньев, называется структурной схемой. На основании полученной схемы и выражений передаточных функций составим систему уравнений:
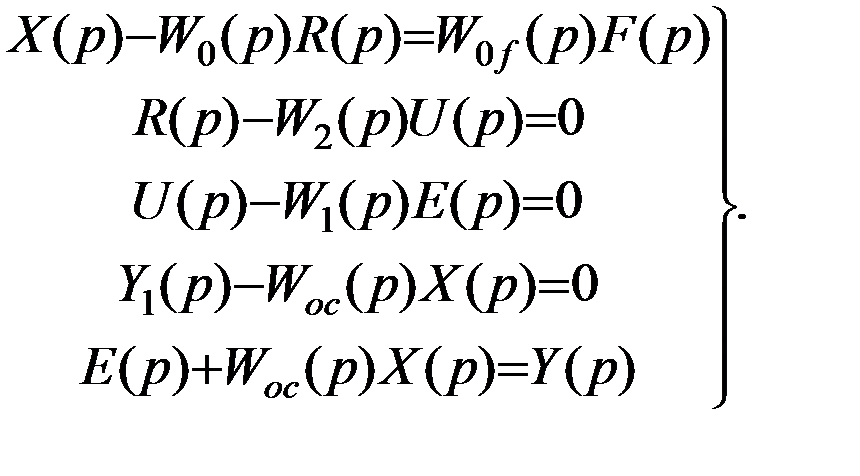 (4. 2)
(4. 2)
Так как звенья с передаточными функциями W1(p), W2(p), W0(p) входят в прямую цепь регулирования, то передаточная функция Wп(p)=W1(p)W2(p)W0(p)
называется передаточной функцией прямой цепи. Тогда
 (4. 3)
(4. 3)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|