- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Екі жақтан қоректенетін желінің режимдерін зерттеу
Жұ мыстың мақ саты –Екі жақ тан қ оректенетін желінің режимдерін зерттеу.
Жұ мыстың мазмұ ны:
1. А жә не В қ оректендіруші пункттерінің бірдей кернеулерінде екі жақ тан қ оректенетін желідегі ағ ынның бө лінуін анық тау.
2. Екі жақ тан қ оректенетін желідегі ағ ынның бө лінуін анық тау. Активтік жә не реактивтік қ уаттар бойынша ағ ын бө лінетін нү ктелерді анық тау.
3. Ең ауыр апаттық режимде желідегі кернеудің шығ ындарын есептеу (яғ ни барлық жү ктемелердің А кө зінен немесе В кө зінен, немесе В кө зінен жә не тү йіндерде жү ктеме ө згермей қ оректенгенде).
Жалпы мә ліметтер
Екі жақ тан қ оректенетін желілер ауылдық электр тораптарында жиі кездеседі. Олардың негізгі қ ұ ндылығ ы – электрмен жабдық таудың сенімділігін кө теру, кемшілігі – қ ұ рылысқ а кететін ү лкен шығ ындар жә не режимдерді есептеу қ иындығ ы.
Тұ йық талғ ан тораптарды, екі жақ тан қ оректенетін желілер олардың бір тү рі болып табылады, есептеудің қ иындығ ы айландардан ө тетін қ уаттарды анық тау болып табылады. .
А жә не В пункттерінде орналасқ ан энергия кө здерінен қ оректенетін желінің бірсызық ты орын ауыстыру сұ лбасын қ арастырады.
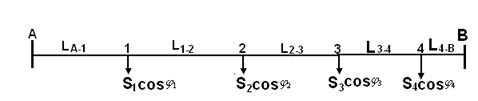
2. 1 сур- Екі жақ тан қ оректенетін желі.
А кө зінен желіге келетін қ уатты формуламен анық тайды:
мұ нда Si -тү йіндердегі жү ктеменің қ уаттары;
Zib - i нү ктесінен В кө зіне дейінгі желінің кедергісі;
Zab - барлық желінің кедергісі;
Ua, Ub, UH-желінің соң дарындағ ы жә не номиналды кернеулер.
Соғ ан ұ қ сас,
Екі формулада да екінші қ осынды немесе тең дестіруші қ уат соң дардағ ы кернеулердің тең дігінде нө лге айналады. Жоғ арыда келтірілген формулағ а Pi, Qi мә ндерін қ ойып, активтік жә не реактивтік қ уаттар ү шін ағ ын бө лінуін бө лек табуғ а болады.
Апаттық режимнің есебі радиалдық желінің есебіне ұ қ сас.
Ағ ын бө лінуі белгілі болса, айландардағ ы кернеудің шығ ындарын формуламен анық тайды:

Екі жақ тан қ оректенетін желінің қ алыпты режимі кернеуінің максималды шығ ыны деп қ орек кө зінен ток бө лінетін нү ктеге дейінгі тораптың бө лек айландарындағ ы кернеудің шығ ындар қ осындысын айтады, яғ ни

Жұ мыстың барысы
1. Оқ ытушының тапсырмасы бойынша тү йіндердегі қ уаттар мен қ уат коэффициенттерін белгілеу.
2. По методу Экономикалық дерелер ә дісімен айландардағ ы сымдардың маркасын жә не анық тамалық ә дебиеттен сымдардың параметрлерін анық тау.
3. Ua, Ub, UH мә ндерін беру
4. Бағ дарламағ а алғ ашқ ы деректерді енгізу.
5. Есептің нә тижесін алу.
6. Кернеулердің эпюраларын тұ рғ ызу.
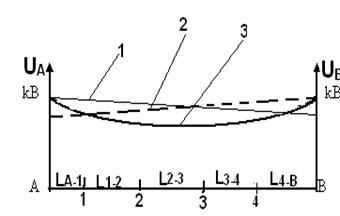
2. 2 сур- Кернеу эпюрасын тұ рғ ызу ү лгісі:
1, 2, 3 қ исық тары– қ алыпты жә не апатты режимдер ү шін
7. кВ-мен айландардағ ы кернеудің шығ ындарын есептеу.
8. Бақ ылау сұ рақ тарына жауап беру.
Бақ ылау сұ рақ тары
1. Екі жақ тан қ оректенетін желі деп нені айтады?
2. Екі жақ тан қ оректенетін желілердің ерекшеліктері.
3. Екі жақ тан қ оректенетін желіде ағ ынның бө лінуі қ алай анық талады?
4. Екі жақ тан қ оректенетін желінің бойындағ ы кернеудің ө згеру сипатына қ андай жә йттар ә сер жасайды?
Бағ дарлама мә тіні
program radius(input, output); uses crt;
varL, RO, XO, S, P, Q, UIST, UK, UN, U, DU: real;
Ll, L2, L3, IAL5, L6, L7, L8: real;
ROl, R02, RO3, RO4, R05, RO6, R07, RO8: real;
XO1, XO2, X03, X04, XO5. X06, XO7, X08: real;
Sl, S2, S3, S4, S5, S6, S7, S8: real;
KOS1, KOS2, KOS3, KOS4, KOS5, K. OS6, KOS7, KOS8: real;
Pl, P2, P3, P4> P5, P6, P7, P8: real;
Q1, Q2, Q3, Q4, Q5, Q6, Q7, Q8: real;
Ul, U2, U3, U4, U5, U6, U7, U8: real;
dUl, dU2, dU3, dU4, dU5, dU6, dU7, dU8: real;
begin clrscr; writeln ('айландардың ұ зындығ ы, км);
read (L1, L2, L3, L4, L5, L6, L7, L8);
writeln ('меншікті активтік кедергі, Ом/км');
read(ROl, R02, R03, R04, RO5, RO6, RO7, RO8);
writeln (' меншікті реактивтік кедергі, Ом/км1);
read(XOl, XO2, X03, X04, X05, X06, XO7, X08);
writeln ('айландардағ ы қ уаттар, кВА1);
read (S1, S2, S3, S4, S5, S6, S7, S8);
writeln ('желі айландарындағ ы қ уаттың коэффициенттері немесе cos fi1);
read (KOS 1, KOS2, KOS3, KOS4, KOS5, KOS6, KOS7, KOS8);
writeln (' В-ғ ы қ орек кө зінің шиналарындағ ы кернеу ');
read (uist);
writeln ('номиналды кернеу, кВ');
read (un);
Ul: =uist - (sl*kosl*rol + sl*(sqrt(l-kosl*kosl))*xol)*Ll/un;
U2: =ul - (s2*kos2*ro2 + s2*(sqrt(l-kos2*kos2))*xo2)*L2/un;
U3: =u2 - (s3*kos3*ro3 + s3*(sqrt(l-kos3*kos3))*xo3)*L3/un;
U4: =u3 - (s4*kos4*ro4 + s4*(sqrt(l-kos4*kos4))*xo4)*L4/un;
U5: =u4 - (s5*kos5*ro5 + s5*(sqrt(l-kos5*kos5))*xo5)*L5/un;
U6: =u5 - (s6*kos6*ro6 + s6*(sqrt(l-kos6*kos6))*xo6)*L6/un;
U7: =u6 - (s7*kos7*ro7 + s7*(sqrt(]~ kos7*kos? ))*xo7)*L7/im;
U8: =u7 - (s8*kos8*ro8 + s8*(sqrt(l-kos8*kos8))*xo8)*L8/un;
DU1: =UIST-U1;
DU2: =U1 -U2;
DU3: =U2 - U3;
DU4: =U3 - U4;
DU5: =U4-U5;
DU6: =U4-U5;
DU7: =U6 - U7;
DU8: =U7-U8:
writeln ('бірінші, екінші, ү шінші, тө ртіншінің шиналарындағ ы кернеулер1);
writeln (' В'-гі басқ а тү йіндердікі сә йкес);
writeln (U1: 8: 2, U2: 8: 2, U3: 8: 2, U4: 8: 2, U5: 8: 2, U6: 8: 2, U7: 8: 2, U8: 8: 2');
writeln ('потери напряжения на первом, втором, третьем бірінші, екінші, ү шіншідегі кернеудің шығ ындары ');
writeln (' В'-гі, жә не сә йкес басқ а айландардағ ы);
writeln (U1: 8: 2, U2: 8: 2, U3: 8: 2, U4: 8: 2, U5: 8: 2, U6: 8: 2, U7: 8: 2, U8: 8: 2');
writeln (' В'-гі, жә не сә йкес басқ а айландардағ ы);
writeln (U1: 8: 2, U2: 8: 2, U3: 8: 2, U4: 8: 2, U5: 8: 2, U6: 8: 2, U7: 8: 2, U8: 8: 2');
end
3 тә жірибеханалық жұ мыс
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|