- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Research locations. The methodology
2. Research locations
The main objects of our research were the glaciers of the Svalbard, located near the Russian Scientific Center in the settlement of Barentsburg. The first of them is the Aldegonda mountain-valley glacier, located on the western shore of the Greenfjord Bay, West Spitsbergen Island (see Figure 1a). The surface of the glacier is rather uniform, but there are several water streams extending from its top to the foot, as well as cracks located in its upper part. The second object, the Esmark glacier, is also a mountain-valley type, but its marginal part goes into the eponymous bay, meaning the glacier is an outlet (see Figure 1b). The marginal zone of the glacier is covered with numerous deep cracks and is absolutely inaccessible for standard “ground true” observations.
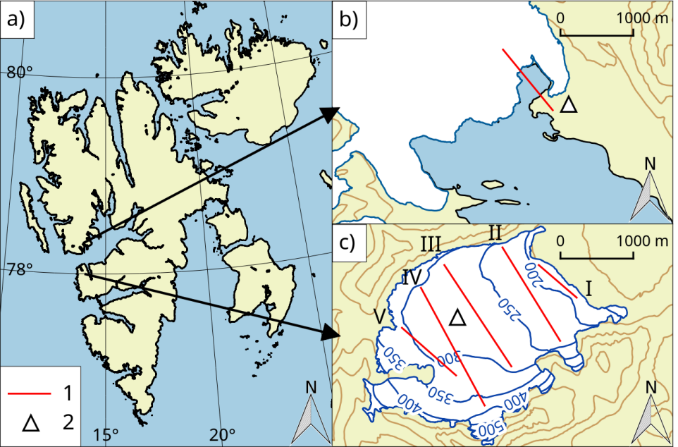
Figure 1 Location of the Esmark (b) and Aldegonda (c) glaciers on Svalbard (a)
1 - routes (profiles) of the UAV albedo surveys; 2 - position of ground observation points.
3. The methodology
An original portable device based on a PaspberryPi microprocessor (see Figure 2), a PiCamV2.0 camera and an LI-190SA photometer was designed and manufactured at the AARI for measurements using a UAV. The choice of these elements was associated with the flexibility of the Pi microprocessor architecture, the coincidence of the spectral coverage of the camera and the sensor (400-700 nm), as well as the typicality of the camera, which is a fairly common example of a good quality photographic recording device.
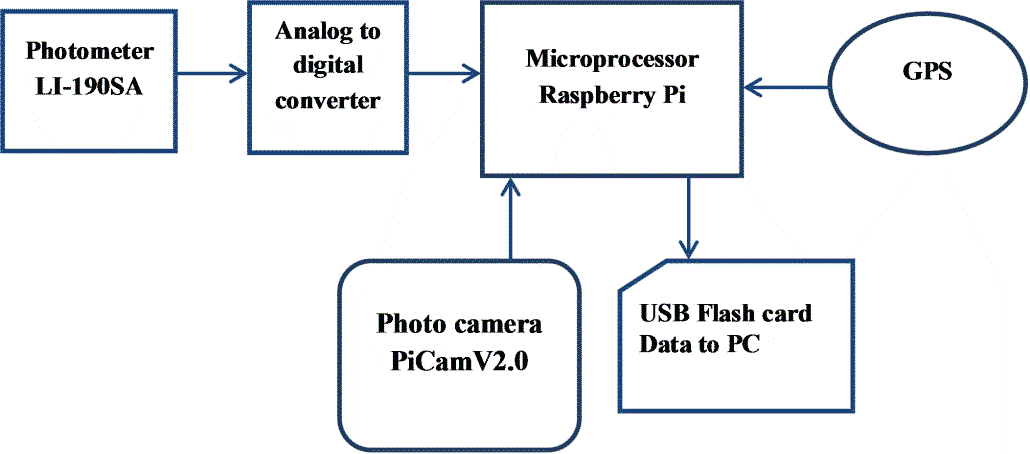
Figure 2 - Schematic diagram of the measuring unit based on the RaspberryPi microprocessor device
The device was made in a compact lightweight body and was intended for use on UAVs (model DJI Phantom 4 Pro). Autonomy was provided by a built-in rechargeable battery up to several hours of continuous operation. The built-in GPS / GLONASS receiver provided data on the spatial position of the UAV. Piloting was carried out in manual control mode, so that the UAV was constantly in the operator's line of sight. Data logging was performed in accordance with a specified time interval from 2 to 10 seconds. The device performed several actions simultaneously during working flights:
- registration of photometer readings (µmol/m²/sec);
- photographing the underlying surface with saving the image in the internal memory of the device;
- recording of parametric information (time, coordinates, image and exposure data).
Thus, "at the output" we received synchronous data on the reflective and exposure characteristics of the underlying surface. Photographic materials made it possible to exclude unrepresentative materials and provide a qualitative assessment of the morphometric characteristics of the filmed surface. The collected information was transmitted to a computer using a Wi-Fi connection. The analysis of the data obtained and the calculation of the surface albedo were carried out using licensed software.
The ground observation point with a special heat balance mast (HBM) was organized in the central part of the Aldegonda glacier to verify the data obtained using the UAV (model DJI Phantom 4 Pro). The HBM was equipped with radiation sensors to assess both incoming and reflected solar radiation. This was necessary in order to obtain representative estimates of the albedo at the surface level and compare it with the data obtained by the UAV. A similar ground-based measuring complex (HBM) was installed on the moraine in the vicinity of the Esmark glacier (see Figure. 1). We used LI-192SA low-response pyranometers (USA, LICOR), which record solar radiation in the range of 400-700 nm. A similar sensor (LI-190SA) was used in the UAV measuring device. Both sensors (LI-190SA and LI-192SA) recorded incoming and reflected solar radiation in the same spectral range and with the same resolution as the photo sensor of the measuring device camera. During the flights over glaciers, the UAV sometimes deviates from the horizontal position (roll, pitch, and yaw) due to changing wind loads (wind speed and direction). Unlike the built-in automatically stabilized UAV camera, the measuring device (LI-190SA sensor) is rigidly attached to the UAV body and this must be taken into account when taking measurements and data analysis. During each flight, a special file was created with complete flight telemetry - speed, altitude, tilt angles, data from onboard sensors, etc. When data processing we selected only the data collected during the horizontal position of the UAV and attachments. The error in calculating albedo values based on measurements of the incoming (HBM) and reflected solar radiation (UAV) did not exceed 5% in comparison with the data obtained at the ground observation point (HBM). On the Aldegonda glacier, the flight routes were planned along profiles oriented across the glacier from northwest to southeast, where the surface elevations were approximately the same above sea level (see Figure 1). Observations were made at a height of 20 m above the glacier surface. The flights were carried out at a speed of 5 m/s and a constant measurement interval of 5 seconds. Thus, the resolution along the flight profile (discreteness of the calculated albedo values) was 25 m. The albedo values calculated using the UAV reflected radiation data were interpolated to the nodes of a regular grid using the “natural neighbor” algorithm included in the standard set the “gridding” package of the Golden Software Surfer [7]. The algorithm uses a subset of the input data closest to the measurement point and applies a weighting method to them: each point in the subset has its own weight depending on the proximity of its location to the desired one. The key feature of this algorithm is that the interpolated values will always be within the range of the used primary data set which rules out the formation of false peaks or dips in the interpolation results. Thus, we managed to obtain the spatial distribution of albedo for a limited period of time under constant illumination conditions (sun height, cloudiness, horizontal visibility range, and other atmospheric conditions). The main area of the research at the Esmark glacier is the edge zone (zone of cracks) of the outlet glacier (see photo in Figure 3). The flights were carried out only along the profile from the dome area (a relatively flat area of the glacier surface) to the open water surface of the fjord.

Figure 3 - Area of work on the Esmark glacier.
Taking into account the changing height of the glacier surface above sea level (from 30 m in the outlet part to 150 m in the plateau area), the UAV flights were performed at different altitude depending on the glacier section, but not less than 50 m from its surface. In both cases (objects of research), the interval of data acquisition from the HBM was synchronized with the interval of data logging and image by the UAV.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|