- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Структурный анализ механизмов. Кинематический анализ механизмов. Пример структурного и кинематического анализа кривошипо-ползунного механизма
1.3. Структурный анализ механизмов
Цель – изучение устройства, принципа действия механизма, определение числа кинематических звеньев, кинематических пар, числа степеней свободы.
Алгоритм структурного анализа.
1.Изображение структурной схемы.
2. Обозначение на ней кинематических звеньев и кинематических пар.
3. Составление таблицы кинематических пар.
4. Определение степеней свободы.
Пример структурного анализа
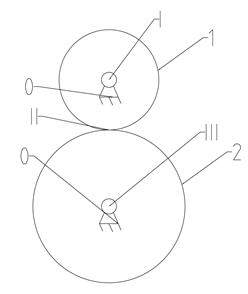
| № пары | № звеньев | Тип кинематической пары |
| I | 0-1 | НКП |
| II | 1-2 | ВКП |
| III | 2-0 | НКП |
W=3n – 2P2 –P1 =3х2 – 2х2 – 1 =6 – 5=1
1.4. Кинематический анализ механизмов
Цель – изучение кинематики механизма, нахождение функциональной зависимости между положениями, скоростями и ускорениями выходных и входных звеньев.
Алгоритм кинематического анализа.
1.Изображение кинематической схемы (В МАСШТАБЕ).
2. Нахождение зависимости положения выходного звена от положения входного звена
3. Построение графика положений механизма (изменение координат выходного звена в зависимости от координат входного).
4. Построение графика скорости и ускорения с помощью графического дифференцирования.
Задачу кинематического анализа можно решить:
а) аналитически (способ ненагляден, более точен);
б) графически (способ нагляден, менее точен).
1.5. Пример структурного и кинематического анализа кривошипо-ползунного механизма
Структурный анализ.
Рис. 1.3. Структурная схема кривошипо-ползунного механизма:
0, 1, 2, 3 - кинематические звенья (0 - неподвижное звено);
I, II, III, IV - кинематические пары
Таблица кинематических пар.
| №№ КП | №№ звеньев | Тип КП |
| I II III IV | 0 – 1 1 – 2 2 – 3 3 – 0 | НКП НКП НКП НКП |
Число степеней свободы механизма:
 .
.
Кинематический анализ.
Размеры звеньев:  ;
;  .
.
Привязка к началу координат:  ;
;  ;
;  .
.
Способ а)
Рис. 1.4. Схема кривошипо-ползунного механизма для аналитического способа решения задачи кинематического анализа
 ;
;
 ;
;  ;
;
 .
.
 - зависимость перемещения ведомого звена (ползуна) от перемещения (угла поворота) ведущего звена.
- зависимость перемещения ведомого звена (ползуна) от перемещения (угла поворота) ведущего звена.
Способ б)
Алгоритм графического способа решения задачи кинематического анализа:
– изображение кинематической схемы;
– построение диаграммы положений;
– построение графика перемещений;
– графическим дифференцированием построение графиков аналогов скоростей и ускорений.
Кинематическая схема и диаграмма положений (рис. 1.5) строятся в масштабе
Рис. 1.5. Кинематическая схема и диаграмма положений кривошипо-ползунного механизма
Рис. 1.6. График перемещений
Рис. 1.7. График аналога скорости
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|