- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Рисунок 7.12 Функциональная схема преобразователя серии ПАВК
Рисунок 7.12 Функциональная схема преобразователя серии ПАВК
 | |||
 | |||
Рисунок 7.13 Синхронно–асинхронный привод турбомашин
 |
Рисунок 7.14 Схема подключения синхронного двигателя в режиме «вентильного двигателя»
 |
Рисунок 7.15 Кривые мощности, потребляемой приводом вентилятора при различных способах регулирования производительности
1 – дроссельное; 2 – направляющим аппаратом; 3 – муфтами скольжения; 4 – реостатное управление АД; 5 – АВК.

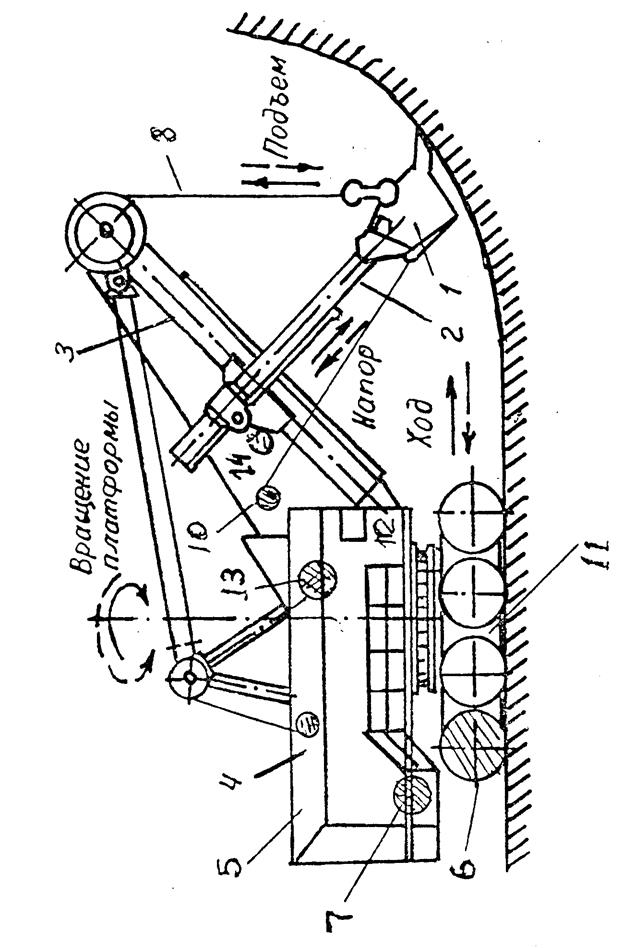
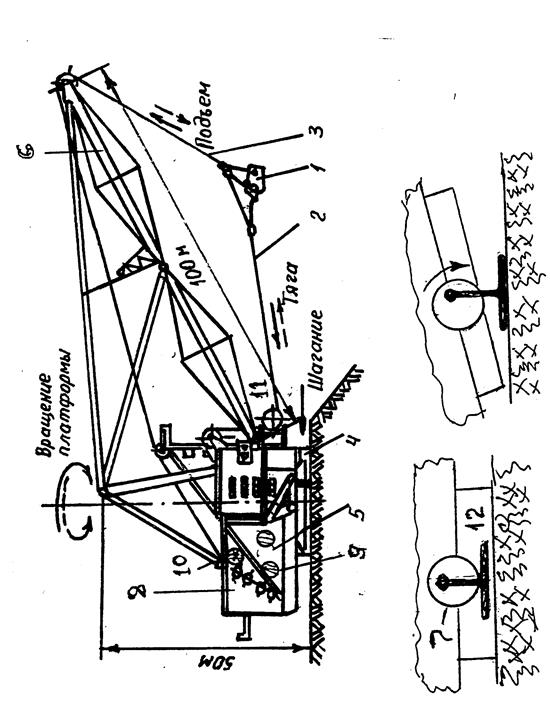

Рисунок 8.3 Форма механической характеристики электроприводов экскаватора-лопаты
| МЕХАНИЗМ | ЛОПАТА |
| Подъём Кз = 0,7 … 0,8 | |
 Напор
Кз = 0,75 … 0,8
Напор
Кз = 0,75 … 0,8
| |
 Поворот
Кз = 0,9 … 0,95
Поворот
Кз = 0,9 … 0,95
|
Рисунок 8.4 Рекомендуемые механические характеристики электроприводов одноковшовых экскаваторов
| МЕХАНИЗМ | ДРАГЛАЙН |
 Подъём
Кз = 0,9
Подъём
Кз = 0,9
| |
|
Тяга
Кз = 0,75 … 0,8
| |
 Поворот
Кз = 0,9 … 0,95
Поворот
Кз = 0,9 … 0,95
|
Продолжение рисунка 8.4
 |
Рисунок 8.5 Схема системы Г-Д с многообмоточным усилителем в качестве возбудителя
 | |||
 | |||
Рисунок 8.6 Системы подчинённого регулирования электроприводов экскаваторов:
а – система ТВ-Г-Д;
б – система ТП-Д
Рисунок 8.7 Внешние нагрузки механизмов экскаватора-лопаты
 |
 |
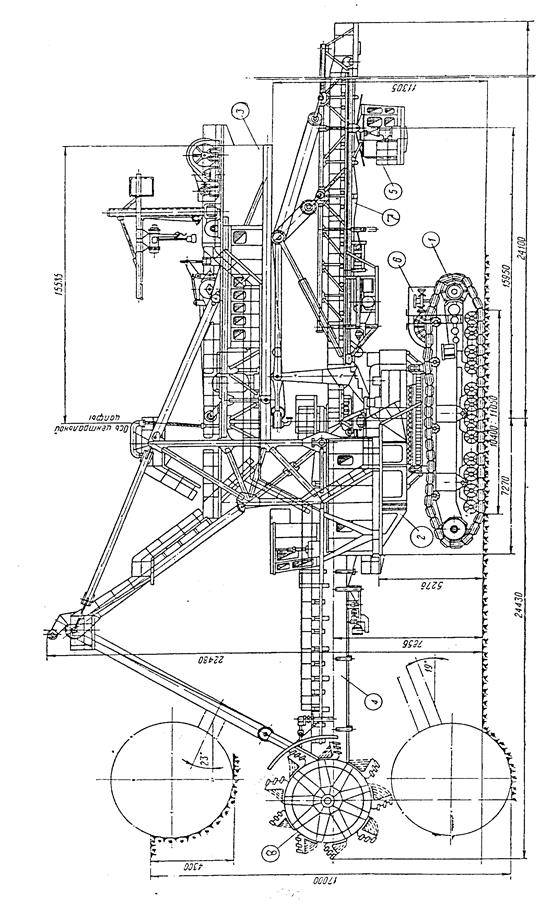
Рисунок 8.9 Схема расположения роторного экскаватора в забое
 |
Рисунок 8.10 Форма выходного сигнала задающего устройства привода поворота платформы
Рисунок 8.11 Принципиальная схема задающего устройства привода поворота платформы
Рисунок 8.12 Функциональная схема управления дозированием хода экскаватора
Рисунок 8.13 Элементы вертикальной стружки
h – высота (длина) вертикальной (горизонтальной) стружки, м;
а – толщина стружки, м; в – ширина стружки, м;
R – радиус ротора по режущим кромкам, м;
V – окружная скорость на внешнем радиусе ротора;
Рк, Рб, Рн – касательная, боковая и нормальная составляющие усилия резания.
 |
Рисунок 8.14 Элементы горизонтальной стружки
 | |
 |
Рисунок 8.15 Расчётная схема для определения высоты подъёма грунта ротором
Рисунок 8.16 Схема к определению мощности привода механизма поворота
         |
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|