- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ПОСТРОЕНИЕ ПЛАНА УСКОРЕНИЙ МЕХАНИЗМА
§ 6. ПОСТРОЕНИЕ ПЛАНА УСКОРЕНИЙ МЕХАНИЗМА
План ускорений построим для механизма (рис. 2), находящегося в положении O1A1B1O2D1E1.
Располагая всеми необходимыми данными для вычисления величины ускорения точки A кривошипа при его вращении вокруг точки O1, построение плана ускорений начнем с нанесения ускорений этой точки. При равномерном вращении кривошипа O1A (w1 = const) точка А будет обладать только нормальным ускорением. Если кривошип будет вращаться неравномерно (w1 ¹ const), то законы изменения угловой скорости w1 и углового ускорения e1 должны быть заданы. В этом случае точка А кривошипа O1A, кроме нормального ускорения, будет обладать и касательным ускорением tA = O1Ae1. В нашем примере будем считать w1 = const и e1 = 0. Численное значение ускорения точки А определим по формуле
WA = nA = O1Aw  , (17)
, (17)
где O1A — длина кривошипа, в м;
w1 — угловая скорость вращения кривошипа, в рад сек. Направлено это ускорение, по радиусу вращения О1А1 от точки А1 к центру вращения, т. е. к точке О1.
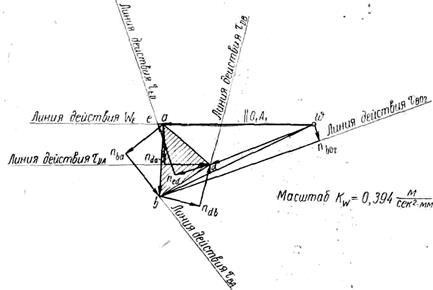
Рис. 5. План ускорений для первого положения механизма, изображенного на рис. 2
Вычисленное нормальное ускорение точки А изобразим на плане ускорений отрезком  произвольной длины, который отложим от полюса w так, чтобы он был параллелен положению кривошипа О1А1 и имел направление от точки А1 к точке О1 (рис. 7).
произвольной длины, который отложим от полюса w так, чтобы он был параллелен положению кривошипа О1А1 и имел направление от точки А1 к точке О1 (рис. 7).
Отрезок является масштабным значением величины ускорения точки. Величина масштаба  плана ускорения найдется из равенства
плана ускорения найдется из равенства
=  , (18)
, (18)
в котором отрезок должен быть выражен в миллиметрах. Ускорение точки В механизма найдем на основании следующих соображений. Абсолютное движение точки В есть вращательное движение вокруг неподвижного шарнира О2, которое в общем случае совершается с переменной угловой скоростью w3, т. е. в этом движении точка В будет обладать как нормальным nBO2, так и касательным ускорением tBO2. Следовательно, для точки В можем написать уравнение
 =
=  +
+  (19)
(19)
где WB — вектор полного ускорения точки В в абсолютном движении.
Имея план скоростей для первого положения (рис. 3), можем вычислить nBO2 по формуле
nBO2 =  , (20)
, (20)
где VB — скорость точки В в ее вращательном движении вокруг O2, в м/сек;
ВО2 —длина коромысла, в м.
Пользуясь масштабными значениями скорости VB и коромысла ВО2, можно выражение (20) представить в виде
nBO2 = 
 . (21)
. (21)
Вычисленное нормальное ускорение точки В должно быть отложено на плане ускорений в виде отрезка в миллиметрах. Величину этого отрезка найдем как частное от деления ускорения nBO2, выраженного в м/сек, на величину масштаба плана ускорений, т. е
 =
=  = . (22)
= . (22)
Таким образом, чтобы определить масштабное значение нормального ускорения точки в данном ее движении, необходимо взять с плана скоростей соответствующий отрезок ее линейной скорости в данном движении, измеренный в миллиметрах, возвести его в квадрат и поделить на масштабное значение радиуса вращения, взятое тоже в миллиметрах. Частное от деления этих двух величин необходимо умножить на коэффициент
К =  . (23)
. (23)
Определив величину отрезка nBO2 по формуле (22), нанесем его на план ускорений в виде отрезка  , отложив его от полюса w так, чтобы он был параллелен коромыслу ВО2 в первом его положении и имел направление, совпадающее с направлением нормального ускорения nBO2, на схеме механизма, т. е. был бы направлен от точки В1 к точке О2 (рис. 5).
, отложив его от полюса w так, чтобы он был параллелен коромыслу ВО2 в первом его положении и имел направление, совпадающее с направлением нормального ускорения nBO2, на схеме механизма, т. е. был бы направлен от точки В1 к точке О2 (рис. 5).
Касательное ускорение tBO2 неизвестно по величине, так как неизвестно угловое ускорение e3 коромысла BO2, при его вращении вокруг точки O2, но известна его линия действия. tBO2 направлено по касательной к траектории движения точки или, что все равно, перпендикулярно радиусу вращения, т. е. в данном случае оно будет перпендикулярно положению B1O2 коромысла. На этом основании через конец отрезка на плане ускорений проведем линию действия tBO2 ^ положению В1O2 коромысла, или, что то же самое, перпендикулярную отрезку нормального ускорения (рис. 5).
С другой стороны, движение точки В можно рассматривать как составное, складывающееся из переносного поступательного движения звена АВ вместе с полюсом А и относительного поворота его вокруг полюса. В этом случае, как известно из теоретической механики,
 =
=  +
+ 
или в наших обозначениях
 =
=  +
+  . (24)
. (24)
В общем случае поворот звена АВ вокруг полюса А совершается с переменной угловой скоростью w2, т. е. ускорение WBA будет складываться из нормального nBA и касательного tBA ускорений, т. е.
=  +
+  . (25)
. (25)
Следовательно, уравнение (24) примет окончательный вид
= + + . (26)
Первое слагаемое правой части уравнения, т. е. ускорение WA, нанесено на плане ускорений в виде . Величину второго слагаемого nBA находим с помощью плана скоростей по уравнению
nBA =  (27)
(27)
или, пользуясь масштабными значениями скорости VBA и длины шатуна АВ, по аналогии с равенством (22), можем сразу определить величину масштабного значения этого ускорения как отрезка
 =
=  (28)
(28)
где  — отрезок относительной скорости точки В в ее движении вокруг полюса А, взятый с плана скоростей, в мм;
— отрезок относительной скорости точки В в ее движении вокруг полюса А, взятый с плана скоростей, в мм;
 —значение длины шатуна АВ, взятое со схемы механизма, в мм.
—значение длины шатуна АВ, взятое со схемы механизма, в мм.
Определив величину нормального ускорения nBA, наносим его в виде отрезка  на план ускорений, откладывая от точки а так, чтобы он был || стороне А1В1 звена 2 и имел направление от точки В1 к точке А1.
на план ускорений, откладывая от точки а так, чтобы он был || стороне А1В1 звена 2 и имел направление от точки В1 к точке А1.
Третье слагаемое правой части уравнения (26), т. е. касательное ускорение tBA точки В, при ее повороте вокруг полюса, по величине нам неизвестно, но линия действия его известна; в данном случае она ^ положению стороны АВ ê ADB. На этом основании через конец на плане ускорения проведем линию действия tBA, ^ отрезку нормального ускорения. Точка пересечения линий действия tBO2 и tBA (точка b на плане ускорений) определяет величины  и
и  масштабных значений этих ускорений и одновременно масштабное значение полного ускорения точки В в виде отрезка
масштабных значений этих ускорений и одновременно масштабное значение полного ускорения точки В в виде отрезка  , который является геометрической суммой ускорения nBO2 и tBO2, в соответствии с уравнением (19), и одновременно геометрической суммой ускорений WA, nBA и tBA, в соответствии с уравнением (26).
, который является геометрической суммой ускорения nBO2 и tBO2, в соответствии с уравнением (19), и одновременно геометрической суммой ускорений WA, nBA и tBA, в соответствии с уравнением (26).
Значение ускорения WB может быть найдено по выражению
WB =  . (29)
. (29)
Величины tBA и tBO2 найдем из уравнений
tBA =  , (30)
, (30)
tBO2 =  bкw (31)
bкw (31)
Оба касательные ускорения направлены к точке b плана ускорений (рис. 5). Сложив геометрически и  найдем , являющийся масштабным значением WBA, которое определим из равенства
найдем , являющийся масштабным значением WBA, которое определим из равенства
WBA = кw (32)
Перейдем к определению ускорения шарнирной точки D звена 2. Рассматривая абсолютное движение точки D как составное, складывающееся из переносного поступательного движения звена 2 вместе с полюсом А и относительного поворота его вокруг полюса, можем написать для точки D уравнение
 . (33)
. (33)
Принимая за полюс точку В и рассматривая абсолютное движение точки D как .составное, складывающееся из переносного поступательного движения звена 2 вместе с полюсом В и относительного поворота его вокруг полюса, можем написать для точки D второе уравнение
 . (34)
. (34)
В соответствии, с уравнением (33) от точки а на плане ускорений отложим отрезок  нормального ускорения nDA, величину которого найдем из равенства
нормального ускорения nDA, величину которого найдем из равенства
 . (35)
. (35)
где  — отрезок относительной скорости точки D в ее движении вокруг полюса А, взятый с плана скоростей, в мм;
— отрезок относительной скорости точки D в ее движении вокруг полюса А, взятый с плана скоростей, в мм;
DA — значение длины стороны AD ê ADB, взятое со схемы механизма, в мм;
К= .
Направление должно совпадать с направлением нормального ускорения nDA на схеме механизма, т. е. этот отрезок должен иметь направление от точки D к точке А—параллельно стороне D1А1 звена 2. Через конец отрезка anda проведем линию действия третьего слагаемого уравнения (33), т. е. линию действия касательного ускорения tDA, перпендикулярную к отрезку нормального ускорения.
В соответствии с уравнением (34) от точки b на плане ускорений отложим отрезок  нормального ускорения nDB, величину которого найдем из равенства
нормального ускорения nDB, величину которого найдем из равенства
 , (36)
, (36)
где  — отрезок относительной скорости точки D в ее движении вокруг полюса В, взятый с плана скоростей, в мм;
— отрезок относительной скорости точки D в ее движении вокруг полюса В, взятый с плана скоростей, в мм;
 — значение длины стороны DB треугольника, взятое со схемы механизма, в мм.
— значение длины стороны DB треугольника, взятое со схемы механизма, в мм.
Направление отрезка должно совпадать с направлением ускорения nDB на схеме механизма, т. е. этот отрезок должен иметь направление от точки D1 к точке В1 — параллельно стороне D1B1. Через конец проведем линию действия третьего слагаемого уравнения (34), т. е. линию действия касательного ускорения tDB, перпендикулярную отрезку нормального ускорения.
Точка пересечения линий действия tDA и tDB (точка d на плане ускорений) определяет величины  и
и  масштабных значений этих ускорений и одновременно масштабное значение величины полного ускорения точки D в виде отрезка
масштабных значений этих ускорений и одновременно масштабное значение величины полного ускорения точки D в виде отрезка  , который является геометрической суммой WA, nDA и tDA, в соответствии с уравнением (33), и одновременно геометрической суммой WB, nDB и tDB в соответствии с уравнением (34). Значение ускорения WD может быть найдено из выражения
, который является геометрической суммой WA, nDA и tDA, в соответствии с уравнением (33), и одновременно геометрической суммой WB, nDB и tDB в соответствии с уравнением (34). Значение ускорения WD может быть найдено из выражения
WD = (37)
Сложив геометрически nDA и tDA, найдем отрезок  , являющийся масштабным значением WDA, определяемым из равенства
, являющийся масштабным значением WDA, определяемым из равенства
WDA = (38)
Точно так же, сложив геометрически nDB и tDB, найдем отрезок  , являющийся масштабным значением WDB, величину которого вычислим из равенства
, являющийся масштабным значением WDB, величину которого вычислим из равенства
WDB = . (39)
а величины tDA и tDB — из выражений
tDA = (40)
tDB =  (41)
(41)
Оба касательные ускорения направлены к точке d плана ускорений (рис. 5).
Построение плана ускорений для данного положения механизма закончим определением ускорения точки Е, абсолютное движение которой есть прямолинейное движение по линии х—х. Движение точки Е можно рассматривать как составное, складывающееся из переносного поступательного движения шатуна DE вместе с полюсом D и относительного поворота его вокруг полюса. В этом случае для точки Е можно написать уравнение
 (42)
(42)
Первое слагаемое правой части уравнения, т. е. ускорение WD имеется на плане ускорений в виде отрезка . Величину второго слагаемого nED найдем с помощью плана скоростей по уравнению
 , (43)
, (43)
где  — отрезок относительной скорости точки E в ее движении вокруг полюса D, взятый с плана скоростей, в мм;
— отрезок относительной скорости точки E в ее движении вокруг полюса D, взятый с плана скоростей, в мм;
 — значение длины шатуна DE, взятое со схемы механизма, в мм.
— значение длины шатуна DE, взятое со схемы механизма, в мм.
Отложим nED в виде отрезка  от точки d плана ускорений параллельно положению D1E1 звена 4 (рис.2) так, чтобы он имел направление, совпадающее с направлением ускорения nED т. е. от точки E1 к точке D1. Величина третьего слагаемого правой части уравнения (42) нам неизвестна, но известна его линия действия. Вектор касательного ускорения tED ^ вектору нормального ускорения nED, т. е. ^ к положению D1E1 шатуна 4. На этом основании через конец проводим линию действия tED ^ . Через полюс w плана ускорений проводим линию действия ускорения WE параллельную линии х—х на схеме механизма (рис. 2). Точка пересечения линий действия касательного tED и полного ускорений точки Е (точка е на плане ускорений) определяет величины
от точки d плана ускорений параллельно положению D1E1 звена 4 (рис.2) так, чтобы он имел направление, совпадающее с направлением ускорения nED т. е. от точки E1 к точке D1. Величина третьего слагаемого правой части уравнения (42) нам неизвестна, но известна его линия действия. Вектор касательного ускорения tED ^ вектору нормального ускорения nED, т. е. ^ к положению D1E1 шатуна 4. На этом основании через конец проводим линию действия tED ^ . Через полюс w плана ускорений проводим линию действия ускорения WE параллельную линии х—х на схеме механизма (рис. 2). Точка пересечения линий действия касательного tED и полного ускорений точки Е (точка е на плане ускорений) определяет величины  и
и  этих ускорений. Значения ускорений найдем из выражений
этих ускорений. Значения ускорений найдем из выражений
tED = (44)
WE = (45)
Отрезок , как геометрическая сумма слагаемых WD, nED и tED, имеет направление от полюса w к точке е. tED, как третье слагаемое уравнения (42), направлено к точке е плана ускорений.
Совершенно аналогично строятся планы ускорений для других его семи положений (см. приложение 1). Имея план линейных ускорений точек механизма, можно найти угловые ускорения звеньев в данном положении механизма. Так, например, если требуется определить угловое ускорение e2 звена 2 в его относительном вращательном движении вокруг полюса А, то для этого достаточно поделить значение tBA на величину радиуса вращения, т. е. на длину стороны АВ ê ADB, и тогда
e2 =  (46)
(46)
или, пользуясь масштабными значениями.
e2 =  (47)
(47)
Найденное ускорение e2 является не только относительным угловым ускорением, но и абсолютным, ввиду того что в переносном движении звена 2 вместе с полюсом А его wпер = 0 и eпер = 0.
Чтобы установить направление углового ускорения e2, следует приложить вектор tВА к точке В на схеме механизма в данном его положении. Угловое ускорение будет направлено в ту же сторону, в какую tВА стремится вращать звено 2 вокруг полюса А. В данном случае (в первом положении механизма) e2 направлено по часовой стрелке.
Для определения величины углового ускорения e3 коромысла BO2 при его повороте вокруг шарнира О2 совершенно аналогично можем написать выражение
e3 =  (48)
(48)
Перенеся вектор tBO2 в точку В на схеме механизма, видим, что он стремится поворачивать коромысло ВО2 против часовой стрелки. Следовательно, и угловое ускорение e3 направлено против часовой стрелки.
Соответственно угловое ускорение e4 шатуна DE в его относительном движении вокруг точки D вычислим по выражению
e4 =  (49)
(49)
Как видно из плана ускорений, e4 направлено против часовой стрелки.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|