- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Кинематический расчет привода и выбор электродвигателя

Кафедра прикладной механики, физики
и инженерной графики
ДЕТАЛИ МАШИН И ОСНОВЫ
КОНСТРУИРОВАНИЯ
Разработка электромеханического привода
Учебно-методическое пособие для выполнения
курсовой работы для обучающихся по направлению подготовки 23.03.03 Эксплуатация транспортно-
технологических машин и комплексов
САНКТ-ПЕТЕРБУРГ
УДК 539.3/6
Чибряков М.В., Миронов А.В. Детали машин и основы конструирования. Разработка электромеханического привода: Учебно-методическое пособие для выполнения курсовой работы для обучающихся по направлению подготовки 23.03.03 Эксплуатация транспортно-технологических машин и комплексов.-СПб.; СПбГАУ. 2018. – 52с.
РЕЦЕНЗЕНТЫ:
профессор кафедры технических систем в агробизнесе СПбГАУ, д.т.н.
М.А. Керимов;
профессор кафедры сервиса транспорта и транспортных систем СПбГЭУ, к.т.н. О.В. Маковецкая-Абрамова
Учебно-методическое пособие предназначено для обучающихся по дисциплине «Детали машин и основы конструирования» по направлению подготовки 23.03.03 Эксплуатация транспортно-технологических машин и комплексов.
Рекомендованы к печати Учебно-методическим советом СПбГАУ,
протокол № 3 от 19 декабря 2018 года.
Чибряков М.В., Миронов А.В., 2018
ФГБОУ ВО СПбГАУ, 2018
Содержание
| Содержание ………………………………………………...… 3 | ||
| Введение …………………………………………..…..……… 4 | ||
| Кинематический и силовой расчет привода …………..…… 5 | ||
| Расчет клиноременной передачи ………………………….… 10 | ||
| Расчет зубчатой передачи …………………………………… 17 | ||
| Эскизная компоновка редуктора………………………...…… 23 | ||
| Расчет валов редуктора. Эскизы валов …………….…...…… 26 | ||
| Подбор и расчет подшипников качения …………..………… 34 | ||
| Выбор и проверочный расчет соединительной муфты…...… 38 | ||
| Выбор и проверочный расчет шпонок ………………...…..… 40 | ||
| Рекомендуемая литература …...…………...……………….… 43 | ||
| Приложения …………………………………………………… 44 |
Заключение…………………………………………..…………. 52
Введение
В современных машинах и установках движение рабочих органов осуществляется в основном с применением электродвигателей, имеющих большие скорости вращения и малые крутящие моменты, поэтому передача движения производится с применением электро-механических приводов. Чаще всего привод состоит из электродвигателя, гибкой (ременной или цепной) передачи, одно- или многоступенчатого редуктора и соединительного механизма – муфты.
Настоящее методическое пособие разработано в соответствии с Федеральным Государственным образовательным стандартом и рабочей программой подготовки бакалавров по направлению: 23.03.03 «Эксплуатация транспортно-технологических машин и комплексов».
Методическое пособие содержит задания для выполнения курсовой работы, требования к содержанию и оформлению пояснительной записки и чертежей, приводится порядок расчета одноступенчатого цилиндрического редуктора с указанием основных определений и зависимостей, методики выполнения курсовой работы и необходимых справочных материалов.
Рассмотрены вопросы кинематического расчета привода, расчета гибкой (клиноременной) передачи. Указаны основные этапы выполнения расчетов зубчатой передачи и валов редуктора. Также приведены примеры подбора подшипников качения, расчета муфты и шпоночных соединений.
Курсовая работа состоит из расчетно-пояснительной записки и графической части – чертежа общего вида редуктора. Задание на курсовую работу выдается преподавателем индивидуально каждому студенту. Варианты заданий приведены в приложении.
Материал изложенный в данной работе, способствует формированию у обучающихся профессиональных компетенций ПК-1, ПК-2 в результате освоения которых обучающийся должен
знать:
– предметное содержание всех изученных разделов дисциплины, их взаимосвязь;
- основные виды механизмов, их классификацию и области применения;
- методики расчета на прочность, жесткость и устойчивость элементов конструкций при статическом и динамическом внешнем воздействии.
уметь:
- составлять расчетную схему исследуемого объекта;
- выбирать материал, обеспечивающий надежную работу конструкции в течение всего срока эксплуатации.
владеть:
- инженерными методами расчета типовых элементов конструкций на прочность, жесткость и устойчивость.
1 КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТ ПРИВОДА
1.1 Основные определения и зависимости для проведения
кинематического расчета
1.1.1 Угловая скорость ω, рад/с. Радиан – величина центрального угла, опирающегося на дугу, длина которой равна радиусу.

 , (1)
, (1)
где n – частота вращения, об/мин.
1.1.2 Линейная скорость v, м/с
 , (2)
, (2)
где D диаметр вращающейся детали, м
1.1.3 Мощность передаваемая валом (мощность на валу) P, Вт
 ;
;  (3)
(3)
где Т – момент на валу, Н  м; F – окружная сила, Н.
м; F – окружная сила, Н.
1.1.4 Коэффициент полезного действия (КПД), η
КПД это отношение полезной мощности (на выходе) к затраченной на входе.
 (4)
(4)
где  – КПД гибкой передачи,
– КПД гибкой передачи,  – КПД зубчатой передачи,
– КПД зубчатой передачи,
 – КПД подшипников качения, n – число пар подшипников.
– КПД подшипников качения, n – число пар подшипников.
1.1.5 Передаточное отношение (число), i

 ;
;
где nвх и nвых - частота вращения на входе и выходе передачи;
ωвх и ωвых – угловые скорости на входе и выходе передачи.
Общее передаточное число привода будет равно
 (5)
(5)
2 Кинематический расчет привода и выбор электродвигателя
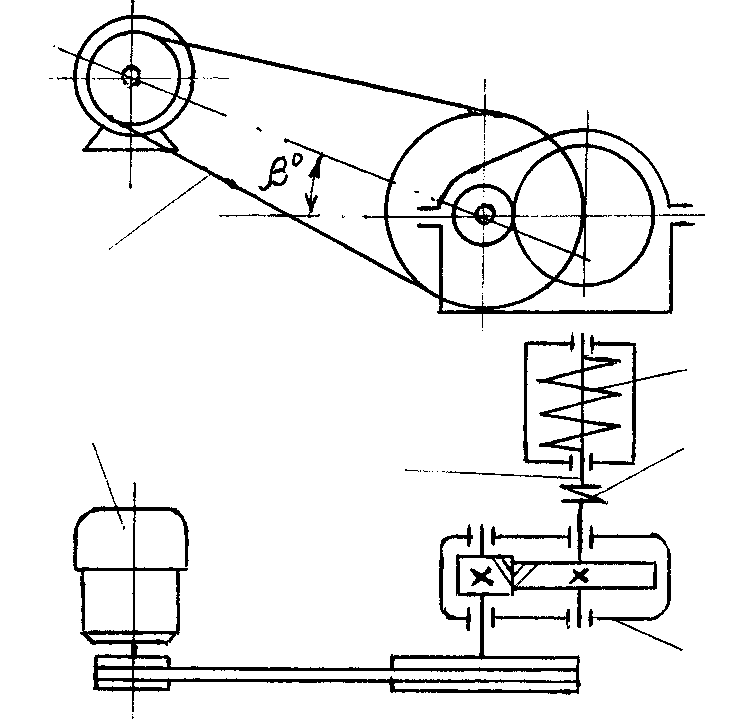
При расчете будем использовать исходные данные задания по разработке привода винтового конвейера согласно следующей схеме
| ωв |
| Тв |
1- электродвигатель; 2-гибкая передача; 3 – редуктор;
4 – муфта; 5 – винтовой конвейер.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|