- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Группа 23. МДК 06.01 Наладка простых и средней сложности КИП. Тема 1.2 Наладка приборов и установок автоматического управления. Классификация САР. Рисунок 1.2 Функциональная схема замкнутой САР
Группа 23
МДК 06.01 Наладка простых и средней сложности КИП
Тема 1.2 Наладка приборов и установок автоматического управления
- Занятие № 13Лекция Классификация технологических объектов управления.
Классификация САР
По виду рабочей (используемой) информации САР делятся на два основных класса:
1. замкнутые системы, использующие принцип обратной связи;
2. разомкнутые системы.
1) Замкнутые системы – это САР с обратной связью, в которых регулируемый параметр непрерывно измеряется и сравнивается с задающим воздействием. Если текущее значение управляемого параметра отличается от заданного, то на выходе ЭС появляется сигнал рассогласования ε (t), который поступает на регулятор. Регулятор вырабатывает управляющее воздействие соответствующего знака таким образом, что в объект вводится (выводится) дополнительное количество энергии или вещества.
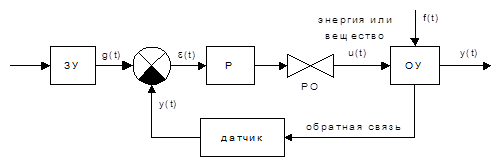
Рисунок 1.2 Функциональная схема замкнутой САР
Согласно определению, управляющее воздействие в замкнутой системе является функцией от рассогласования:
u(t)=F{ε(t)}
Достоинство: Регулируемая величина непрерывно контролируется.
По виду задающего воздействия g(t) замкнутые САР делятся на:
- системы стабилизации;
- системы программного регулирования;
- следящие системы.
В системах стабилизации заданное значение постоянно во времени:
g(t) = const
Пример: поддержание температуры, давления, концентрации и т.д. на заданном уровне.
В системах программного регулирования заданное значение изменяется во времени по строго определённой программе:
g(t) = f(t),
где f(t) – известная функция времени.
В следящих системах заданное значение изменяется произвольным, заранее неизвестным образом:
g(t) = η(t),
где η(t) – случайная, заранее неизвестная функция времени.
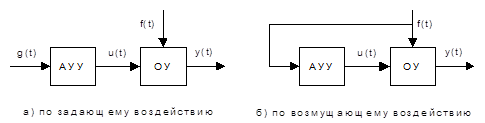
2) Разомкнутые системы – это системы, в которых отсутствует обратная связь и в которых задающие параметры воздействуют на регулируемые параметры объекта по разомкнутой цепи управления.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|