
Главная
Контакты
Случайная статья
|
Деятельность обучающихся. Планируемые результаты
Деятельность обучающихся
|
Планируемые результаты
|
| предметные
| УУД
|
| I. Организационный этап
(2 мин.)
Цель:дать учащимся подготовиться к уроку.
| Здравствуйте, ребята. Меня зовут Анастасия Андреевна. И сегодня я буду вести у вас урок.
Давайте, отметим отсутствующих.
| | Дать учащимся подготовиться к уроку.
| Планирование,
|
| II. Актуализация знаний
(5 мин.)
Цель: создание условий для возникновения у обучающихся внутренней потребности включения в учебную деятельность
| Запишем тему сегодняшнего урока: Автономные движущиеся роботы. Исполнительные устройства, датчики. Система команд робота.
Прежде чем приступить к теме сегодняшнего урока, я хочу узнать как вы понимаете следующее высказывание:
Одна машина способна выполнить работу пятидесяти ординарных людей, но ни одна машина не выполнит работу одного неординарного человека.
Элберт Хаббад.
Слушаем высказывание детей.
Хорошо. Тогда как вы понимаете значение слова Автономия(самостоятельность, способность или право субъекта действовать на основании установленных принципов).
Отлично. Давайте приступим к изучению темы.
| Размышляют над вопросом, выдвигают свои версии ответа на вопрос.
|
| Структурирование знаний, умение выражать свои мысли, умение строить высказывание.
|
| III.Объяснение нового материала
(20мин.)
Цель:сформировать у учащихся представление о том, что такое автономные роботы, какие датчики необходимы ему для исполнения определенных команд, влияют ли ошибки на выполнение команд исполнителем.
| Записываем определение.
Автономные движущиеся роботы– это роботы, которые совершают поступки или выполняют поставленные задачи с высокой степенью автономии, что особенно необходимо в таких областях, как освоение космоса, ведение домашнего хозяйства(например, уборка), очистка сточных вод и доставка товаров и услуг.
Как вы и сами можете догадаться, робот не может функционировать без поступления необходимой информации об окружающем расположении объектов, с которыми он должен взаимодействовать.
Как вы считаете, через что робот получает необходимую ему информацию? (датчики)
Источниками информации для робота служат разнообразные датчики, передающие данные на контроллер – «мозг» - робота, который обрабатывает поступающие сигналы и «принимает решение» о дальнейших дейтсвиях.
Запишем кратко о видах датчиков:
1. Светочувствительный датчик – этот датчик даёт возможность различать наличие или отсутствие света, а также, 7 оттенков цветов (белый, черный, синий, красный, зеленый, коричневый, желтый).
2. Два тактильных датчика или датчики касания – это аналоговые датчики, определяющие наличие касания на специальную кнопку, встроенную в прибор, и силу нажатия.
3. Ультразвуковой датчик или датчик расстояния – измеряет расстояние до объекта при помощи отраженных звуковых волн.
4. Гироскоп – это датчик для определения положения в пространстве.
Но все мы знаем, что для того чтобы робот начал делать какую-либо работу, ему необходимо прописать некие правила. Эти правила называются системой команд исполнителя. Давайте запишем:
Система команд исполнителя(СКИ) -это все команды, которые исполнитель умеет выполнять.
Управлять роботом можно либо вручную (с пульта), либо с помощью программы, которая состоит из определенного набора команд. У каждого исполнителя свой набор команд.
Вот, например, список СКИ для исполнителя Робот:
1. направо; повернуться на 90 градусов вправо
2. налево; повернуться на 90 градусов влево
3. кругом; развернуться кругом (на 180 градусов)
4. вперед ( n ); перейти на n клеток вперед
5. назад ( n ); перейти на n клеток назад
6. посади; посадить цветы на грядке в том месте, где стоит Робот.
Как вы понимаете, саму программу пишет для робота человек. Поэтому не исключены ошибки в написании алгоритма программы.
Любая ошибка может привести к тому, что робот просто запутается в программе и не сможет эффективно выполнить свою задачу.
Также, даже если программа написана превосходно, но допущена ошибка во введении каких-либо данных. Робот работать будет, но так как ошибка в программе, то и его расчеты будут ошибочны.
Вот так вот. Программа для робота написана, ошибка допущена всё. Робот вместо уборки, будет гоняться за домочадцами.
| Слушают материал урока, записывают текст со слайда, отвечают на заданные вопросы
| Объяснение нового материала. Дополнение его презентацией.
| Планирование учебного сотрудничества, поиск информации, моделирование, формулировка проблемы, разрешение конфликтов, постановка вопросов, планирование,
|
| III. Практическая работа.
(10 мин).
Цель: проанализировать насколько хорошо учащиеся усвоили выданный материал.
| Итак, ребята, давайте сядем за компьютеры и выполним небольшую практическую работу.
На столах лежат листы с практическим заданием. Выполняем.
1. Запустить программу КУМИР. 2. Создадим новую обстановку для РОБОТа: а) В Главном меню программы выбрать пункт ИНСТРУМЕНТЫ
б) Выбрать РЕДАКТИРОВАТЬ СТАРТОВУЮ ОБСТАНОВКУ РОБОТА в) В окне ОБСТАНОВКА щелкнуть элемент ОБСТАНОВКА и выбрать НОВАЯ ОБСТАНОВКА, затем задать количество строк (6) и количество столбцов (6) г) Щелчком мыши установить стенки обстановки и переместить робота на нужную клетку. д) Сохранить обстановку через элемент ОБСТАНОВКА – СОХРАНИТЬ КАК; выбрать место сохранения(Мой компьютер-Документы), дать имя файлу обстановки (число_класс) и щелкнуть кнопку СОХРАНИТЬ е) Закройте обстановку 3. Установить обстановку для робота. а) В Главном меню программы выбрать пункт РОБОТ б) Выбрать СМЕНИТЬ СТАРТОВУЮ ОБСТАНОВКУ в) В окне ОТКРЫТЬ ФАЙЛ выделить сохраненный ФАЙЛ и щелкнуть кнопку ОТКРЫТЬ
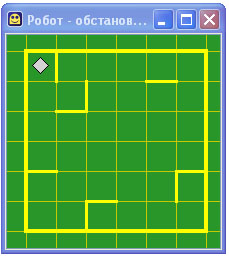
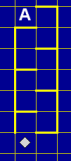
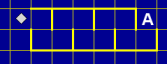
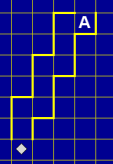
г) Если выбранная обстановка не отобразилась в окне программы, щелкнуть по кнопке ПОКАЗАТЬ ОКНО РОБОТа  Задание 1. Создайте стартовую обстановку:
Задание 1. Создайте стартовую обстановку:
    2. Составление простейшей программы
2.1. Общая структура программы (без параметров) в системе КуМир.
Структура программы: алг имя_программы нач основная программа кон
2.2. Написание и выполнение программы
1. Для того чтобы активизировать систему для исполнителя РОБОТ, нужно выполнить следующее: а) В Главном меню программы выбрать пункт ВСТАВКА - ИСПОЛЬЗОВАТЬ РОБОТ в) В Главном меню выбрать РОБОТ – ПОКАЗАТЬ ОКНО РОБОТА или использовать кнопку ПОКАЗАТЬ ОКНО РОБОТА на Панели инструментов 2. В окне программы между служебными словаминач и кон записать на русском языке команды РОБОТа (допустимые: вверх, вниз, вправо, влево, закрасить).
3. Запустить программу на выполнение: а) Для просмотра действия программы щелкнуть на ГЛАВНОМ МЕНЮ элемент ВЫПОЛНЕНИЕ – ВЫПОЛНИТЬ НЕПРЕРЫВНО
У кого возникнут вопросы, поднимаем руку – я подойду.
Итак ребята, заканчиваем, кто сколько успел.
2. Составление простейшей программы
2.1. Общая структура программы (без параметров) в системе КуМир.
Структура программы: алг имя_программы нач основная программа кон
2.2. Написание и выполнение программы
1. Для того чтобы активизировать систему для исполнителя РОБОТ, нужно выполнить следующее: а) В Главном меню программы выбрать пункт ВСТАВКА - ИСПОЛЬЗОВАТЬ РОБОТ в) В Главном меню выбрать РОБОТ – ПОКАЗАТЬ ОКНО РОБОТА или использовать кнопку ПОКАЗАТЬ ОКНО РОБОТА на Панели инструментов 2. В окне программы между служебными словаминач и кон записать на русском языке команды РОБОТа (допустимые: вверх, вниз, вправо, влево, закрасить).
3. Запустить программу на выполнение: а) Для просмотра действия программы щелкнуть на ГЛАВНОМ МЕНЮ элемент ВЫПОЛНЕНИЕ – ВЫПОЛНИТЬ НЕПРЕРЫВНО
У кого возникнут вопросы, поднимаем руку – я подойду.
Итак ребята, заканчиваем, кто сколько успел.
| Выполняют практическую работу в соответствии с выданным планом.
| Насколько хорошо закрепились знания в головах учащихся.
Оценка правильности выполнения практической работы.
| Контроль, оценка, коррекция.
|
| IV. Рефлексия. Итог урока.
(2мин)
Цели: анализ тех моментов материала, которые обсуждались на уроке, самоанализ учащихся.
| Подведение итогов урока. Выставление оценок.
Небольшая рефлексия того, что изучили на уроке.
| Отвечают на вопросы, ведут диалог с практикантом.
| Самоанализ учащихся по поводу пройденного урока, с целью проверить качество усвоения выданного им материала
| Контроль.
|
| VI.Домашнее задание
(1мин.)
| Написать сообщение про один из видов исполнителей (робот, кенгуру, черепашка, водолей и т.д.)
| Учащиеся записывают домашнее задание в дневник
| Выдать ученикам домашнее задание
|
|