- Р Р‡.МессенРТвЂВВВВВВжер
- ВКонтакте
- РћРТвЂВВВВВВнокласснРСвЂВВВВВВРєРСвЂВВВВВВ
- Telegram
- РњРѕР№ Р В Р’В Р РЋРЎв„ўР В Р’В Р РЋРІР‚ВВВВВВРЎР‚
- LiveJournal
- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
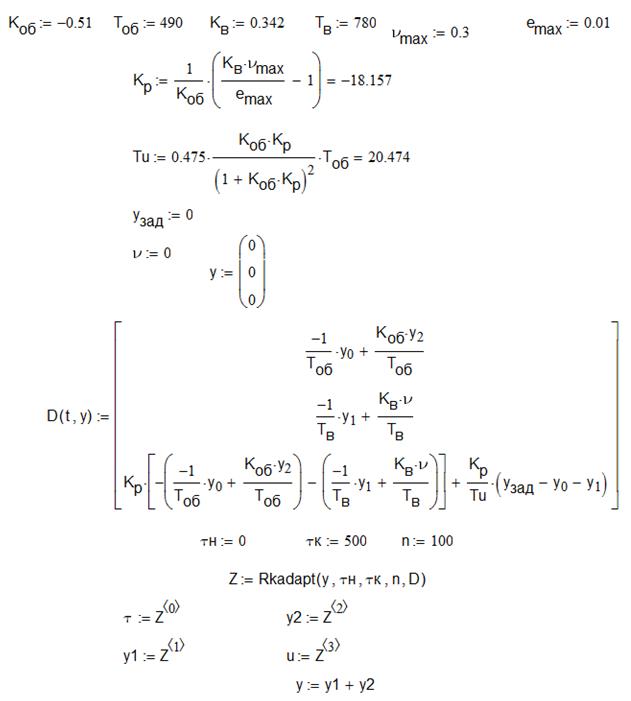
Модель системы в пространстве состояний
Модель системы в пространстве состояний
Листинг программы моделирования САР в программе MathCad:
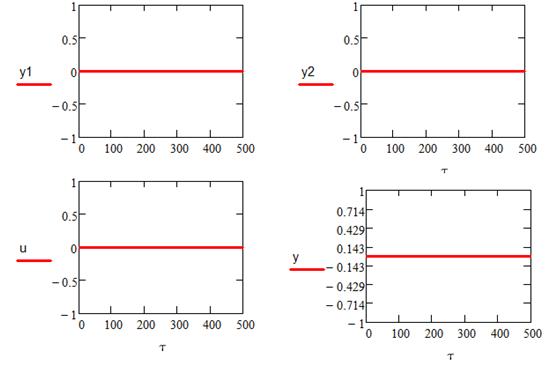
Графики переходных процессов управления
Для начала проверим работу программы при нулевых значениях yзад и νmax.
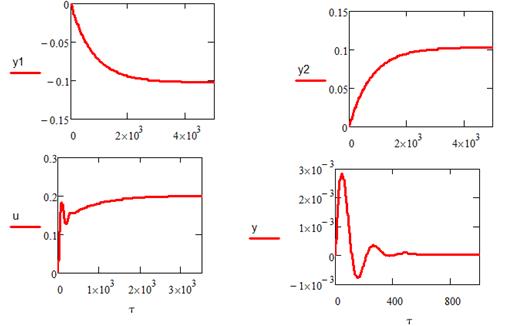
Пусть значение возмущающего воздействия равно ν= νmax/2=0,3/2=0,15, а заданное значение равняется yзад=0
|


Система устойчива;
Время регулирования -τр=0 с (т.к. emax=0,01)
Динамическая ошибка- σ=0,0014;
Статическая ошибка- ∆=0.
Пусть значение возмущающего воздействия равно ν= νmax=0,3, а заданное значение равняется yзад=0
|


Система устойчива;
Время регулирования -τр=0 с (т.к. emax=0,01);
Динамическая ошибка- σ=0,0028;
Статическая ошибка- ∆=0.
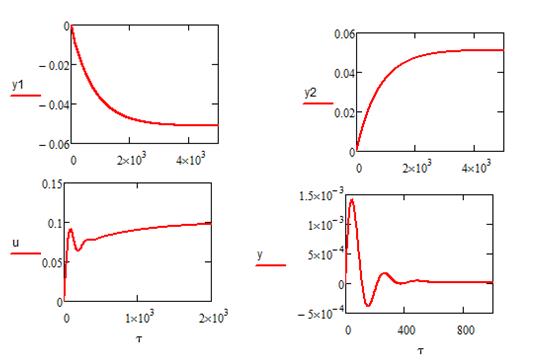
Пусть заданное значение равняется yзад=0,2, возмущение отсутствует ν= 0
|
|



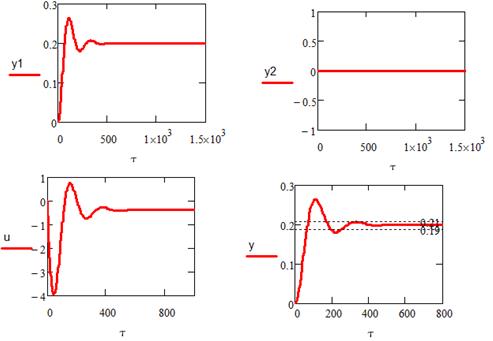
Система устойчива;
Время регулирования -τр=250 с;
Динамическая ошибка- σ=0,06;
Статическая ошибка- ∆=0.
Зададим возмущающее воздействие равное ν=0,2 и изменим значение заданной величины yзад=0,05
|
|



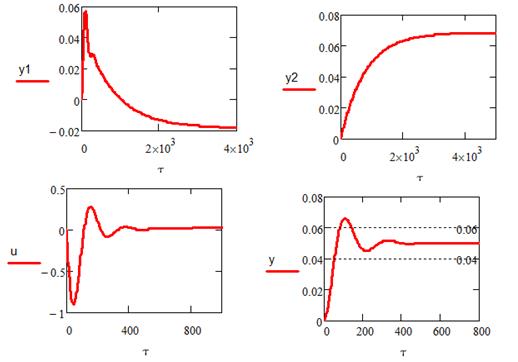
Система устойчива;
Время регулирования -τр=165 с;
Динамическая ошибка- σ=0,015;
Статическая ошибка- ∆=0.
Проверим систему на робастность. Оставим параметры прежние, только увеличим постоянную времени объекта (ν=0,2 и yзад=0,05, Тоб=540 (исходное значение Тоб=490))
|


|

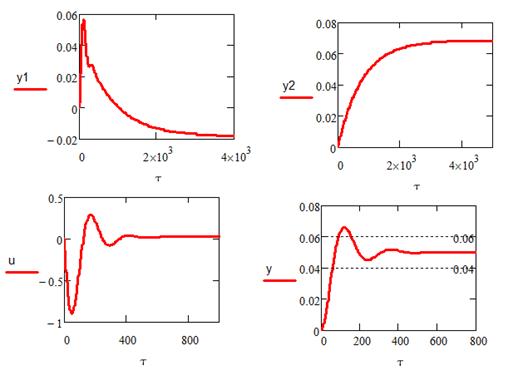
Система устойчива;
Время регулирования -τр=165 с;
Динамическая ошибка- σ=0,015;
Статическая ошибка- ∆=0.
Вывод
В ходе выполнения лабораторной работы были приобретены умения и навыки параметрического синтеза САР промышленных объектов. Так же было проведено исследование работоспособности системы методами математического моделирования.
По результатам исследования системы управления на устойчивость, инвариантность, ковариантность и робастность можно сделать вывод, что одноконтурная система устойчива, так как все переходные процессы имеют затухающий вид, кроме того система инвариантна к возмущениям. Стоит отметить, что изменяя заданное значение, система смогла его отследить, значит, её можно назвать ковариантной с заданием. Кроме того, система прошла проверку на наличие такого свойства, как робастность.
На основании вышесказанного, можно считать данную САР работоспособной.
Список используемой литературы
1. Алексеев А.А. и др. Теория управления. Учеб./СПб.: Изд-во СПб ГЭТУ «ЛЭТИ». 1999. – 435 с.;
2. Ротач В.Я. Расчет настройки промышленных систем регулирования. М.: Госэнергоиздат, 1961. – 344 с.
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|