- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Рис 1.21. Зависимость ЭДС ех элемента Холла и напряжения Un на выходе датчика Холла от угла поворота ротора α
Рис 1.21. Зависимость ЭДС ех элемента Холла и напряжения Un на выходе датчика Холла от угла поворота ротора α
Датчик-регулятор угла опережения зажигания в зависимости от частоты вращения коленчатого вала двигателя (центробежный регулятор).
Под опережением зажигания понимается воспламенение рабочей смеси до момента достижения поршнем верхней мертвой точки (ВМТ) в такте сжатия. Принцип действия датчика основан на свойстве инерции тела.
Имеется ведомая и ведущие пластины, грузики, которые под действием центробежной силы преодолевают сопротивление пружины и воздействуют на ведомую пластину (рис.1.22). Эта пластина, а вместе с ней и ротор датчика момента искрообразования, поворачиваются в сторону вращения вала на угол α, величина которого линейно зависит от частоты вращения коленчатого вала . Вследствие этого момент искрообразования происходит раньше. При достижении определенной частоты вращения грузики поворачиваются на максимальный угол и регулятор перестает работать.
Принцип действия датчика-регулятора угла опережения зажигания в зависимости от нагрузки двигателя (вакуумного регулятора) основан на свойстве упругих тел деформироваться под действием разности давлений (рис.1.23).
Основным элементом датчика является упругая диафрагма, которая разделяет пространство датчика на две полости. Одна полость соединяется со смесительной камерой карбюратора над дроссельной заслонкой, а другая - с атмосферой. При снижении нагрузки на двигатель дроссельная заслонка прикрывается, разрежение в этой полости увеличивается, мембрана прогибается и с помощью тяги угол опережения зажигания увеличивается. При увеличении нагрузки угол опережения
зажигания уменьшается (рис.1.25).
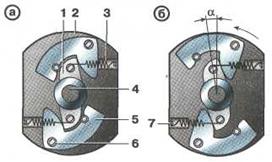
Рис 1.22. Принцип действия датчика-регулятора угла опережения зажигания в зависимости от частоты вращения коленчатого вала двигателя (центробежного регулятора):
1- ведомая пластина; 2 - ведущая пластина; 3 - пружина; 4 - ведущий вал; 5 - грузики; 6 - ось грузика на ведущей пластине; 7 - стойка пружины; а- положение грузиков на холостом ходу двигателя; 6 - положение грузиков при максимальной частоте вращения коленчатого вала двигателя
|
|
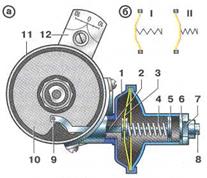
Рис 1.23. Принцип действия датчика-регулятора угла опережения зажигания в зависимости от нагрузки двигателя (вакуумного регулятора):
а- схема датчика-регулятора; 1 - корпус; 2 - тяга; 3-диафрагма; 4-пружина; 5, 6-прокладки; 7 - штуцер; 8 - трубка; 9 - штифт; 10 - ведомая пластина датчика момента искрообразования; 11 - корпус датчика-распределителя; 12 -октан-корректор; б- положение диафрагмы: I - при большой нагрузке; II - при малой нагрузке
1.3.4. Датчики микропроцессорных систем зажигания (МПСЖ)
В МПСЗ применяется электронное управление углом опережения зажигания. Центральной частью МПСЗ является контроллер (блок управления), который обрабатывает информацию, поступающую от датчиков, и в соответствии с ней, установив оптимальный для данного режима угол опережения зажигания, дает команду (иногда через коммутатор) на образование искры. Кроме того, МПСЗ выполняет функции электронного блока экономайзера принудительного холостого хода.
Типы датчиков, установленных в МПСЗ (ВАЗ) (рис.1.24):
- датчик абсолютного давления;
- датчик положения дроссельной заслонки;
- датчик положения (частоты вращения) коленчатого вала;
- датчик температуры охлаждающей жидкости;
- датчик температуры воздуха;
- датчик детонации.
В автомобилях «Москвич» и «Газель» еще есть датчики:
- начала отсчета;
- угловых импульсов.
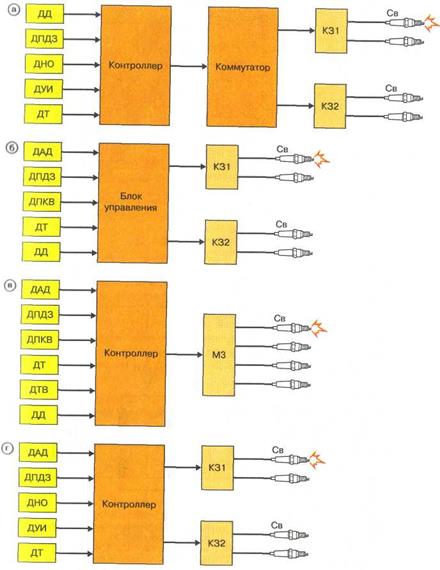
Рис 1.24. Функциональные схемы микропроцессорных систем зажигания автомобилей «Газель» (а); «Соболь» (б); ВАЗ (в); «Москвич» (г): ДАД - датчик абсолютного давления ПКВ - датчик положения (частоты вращения) коленчатого вала; ДНО - датчик начала отсчета ДУИ - датчик угловых импульсов; ДТ - датчик температуры охлаждающей жидкости- ДТВ - датчик температуры воздуха .ДД- датчик детонации; ДПДЗ - датчик положения дроссельной заслонки, К32 - катушки зажигания; МЗ - модуль зажигания; Св – свечи зажигания
Датчики температуры.
Те же, что и применяются в контрольных приборах (полупроводниковые тензорезистивные). Но в отличие от них выходным сигналом датчиков температуры, используемых в МПСЗ, является не сопротивление, а напряжение. При этом терморезистор включается в одно из плеч измерительного моста. Такое подключение обеспечивает независимость выходных сигналов датчика от колебаний напряжения в бортовой сети автомобиля (рис.1.25).
Снимаемый с диагонали измерительного моста сигнал усиливается и преобразуется в выходное напряжение датчика. При возрастании температуры сопротивление датчика уменьшается, что приводит к увеличению разбаллансировки моста и увеличению выходного напряжения. Параметры реального датчика подобраны так, что выходное напряжение линейно изменяется от температуры. Причем, величина выходного напряжения (в милливольтах) при питании датчика постоянным током 1,5 мА численно равна измеряемой температуре, выраженной в градусах Кельвина и умноженной на десять. Например, если измеряемая температура 50 ° С (323 ° К), то на выходе датчика напряжение будет: Uд = 323 • 10 = 3230 мВ = 3,23 В.
Тип датчика: 19.3828. Устанавливается датчик температуры охлаждающей жидкости на патрубке отвода этой жидкости из головки блока цилиндров, а датчик температуры воздуха - на корпусе воздушного фильтра (ВАЗ). Диапазон температуры окружающей среды (-40 ±125 ºC).

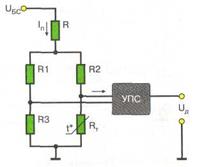
Рис 1.25. Принципиальная схема датчика температуры МПСЗ:
Rt- терморезистор; R, R1, R2, R3 - резисторы; УПС- усилительно-преобразовательная схема; Uбс - напряжение бортовой сети; Uд - выходное напряжение датчика; IП - ток питания датчика.
Индуктивные датчики частоты вращения.
В основе работы этих датчиков лежит явление электромагнитной индукции. Выполнены (рис. 1.26) в виде катушек 2 с магнитным сердечником. 3. При прохождении под сердечником 3 зубца ферромагнитного диска 4 (например, зубца венца маховика коленчатого вала двигателя) магнитный поток Ф датчика изменяется, и в катушке датчика индуцируется ЕВых, амплитуда импульсов которой зависит от частоты вращения коленчатого вала и зазора между сердечником и зубцом маховика.
В МПСЗ (ВАЗ, ГАЗ) в качестве датчиков начала отсчета и угловых импульсов используют индуктивные датчики типа 141.3847.
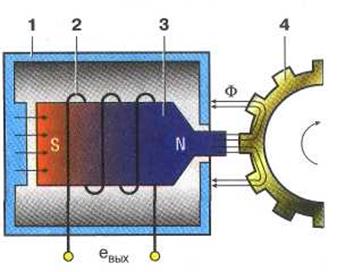
Рис 1.26. Принцип действия индуктивных датчиков:
1- магнитопровод; 2-катушка индуктивности; 3 - магнитный сердечник; 4 - ферромагнитный диск; Ф - магнитный поток; евых - выходной электрический сигнал
Датчики детонации.
Детонация, т.е. взрывное воспламенение рабочей смеси в цилиндрах двигателя, вызывает сильную вибрацию и перегрев двигателя, что может привести к механическому разрушению его деталей. В основе работы датчиков детонации лежит явление пьезоэлектрического эффекта (возникновение электрических зарядов при деформации кристаллов (рис.1.27). При сжатии или растяжении прямоугольной призмы из кварца (двуокиси кремния) по оси Z на гранях F z появляются заряды противоположного знака. Величина заряда равна:
 ,
,
где Qz - заряд в кулонах; е - пьезоэлектрическая постоянная (для кварца 2,1 10-11кулон/кг); рz - удельное давление в кг/см; F z - площадь поверхности призмы в см.
В датчиках детонации сжатие кварцевой пластины осуществляется инерционной массой, вибрирующей вместе с деталями двигателя. Напряжение на входе электронной схемы усиления и преобразования пропорционально давлению инерционной массы на кварцевую пластину. При возникновении детонации амплитуда электрических сигналов датчика резко увеличивается. Блок управления реагирует на увеличение этой амплитуды коррекцией угла опережения зажигания до прекращения детонации.
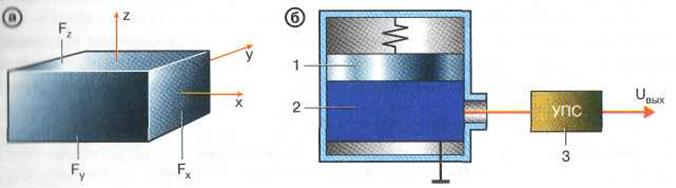
Рис. 1.27. Принцип действия датчика детонации:
а-кристалл кварца; б- схема датчика; 1 - инерционная масса (шайба); 2 - кварцевая пластина (пьезоэлемент); 3- схема усиления и преобразования
Датчики абсолютного давления.
В основе работы лежит тензорезистивный эффект. На тонкой кремниевой мембране расположены четыре тензорезистора, образующие мостовую схему (рис.1.28). Датчик измеряет разность между атмосферным давлением и давлением во впускном трубопроводе. Это необходимо для оценки нагрузки на двигатель (по количеству воздуха, поступающего в двигатель) и соответствующей корректировки угла опережения зажигания.
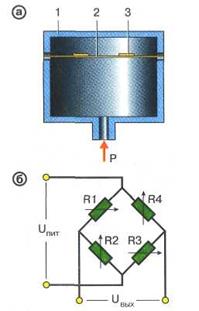
Рис 1.35. Принцип действия тензорезистивного датчика абсолютного давления:
а- устройство; б- схема; 1 - корпус; 2 - мембрана; 3 – тензорезисторы
1.4. Измерительные схемы автоматических систем.
1.4.1. Мостовая измерительная схема астатического уравновешивания относится к равновесным измерительным схемам и реализует метод нулевого отсчета (рис.1.37). В основу схемы положена мостовая реостатная измерительная схема. Мера задается величинами сопротивлений резисторов моста, но не является постоянной. Величина меры соответствует каждому установившемуся значению измеряемой величины. Изменение величины меры производится путем перемещения движка реохорда  . Условия равновесия схемы определяется уравнением: R1 R2 = R2 R4. Изменение сопротивления R1 чувствительного элемента на величину
. Условия равновесия схемы определяется уравнением: R1 R2 = R2 R4. Изменение сопротивления R1 чувствительного элемента на величину  R сопровождается появлением напряжения на выходе схемы определяемого уравнением:
R сопровождается появлением напряжения на выходе схемы определяемого уравнением:  . Для приведения схемы в новое равновесное состояние необходимо изменить соотношение сопротивлений плеч ab и bc на величину . Условие равновесия моста с учетом перемещения движка реохорда имеет вид:
. Для приведения схемы в новое равновесное состояние необходимо изменить соотношение сопротивлений плеч ab и bc на величину . Условие равновесия моста с учетом перемещения движка реохорда имеет вид:
(R + ∆R - ∆RР) R = (R + ∆R) R ,
где 
Тогда 
 .
.
Перемещение движка реохорда для обеспечения соотношения осуществляется с помощью реверсивного электродвигателя М и редуктора с передаточным отношением i. Усилитель А1 предназначен для усиления сигнала рассогласования (разбаланса) схемы по напряжению и мощности. Принцип действия схемы основан на компенсации изменения сопротивления R чувствительного элемента изменением плеч реохорда на величину  . Поэтому такие измерительные схемы называются
. Поэтому такие измерительные схемы называются
компенсационными. Чувствительность схемы определяется уравнением (1.6)
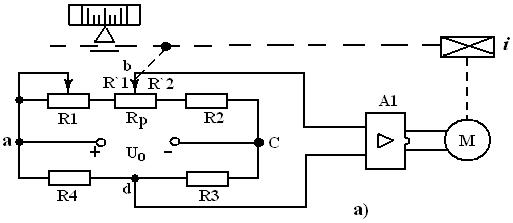
Рис. 1.37.
1.4.2 Мостовая потенциометрическая схема астатического уравновешивания (рис.1.38) предназначена для измерения параметров (температура, давление, перемещение и др.) функционально связанных с электрическим напряжением и относится к равновесным измерительным схемам. Задание схемы производится аналогично мостовой реостатной измерительной схеме астатического уравновешивания.
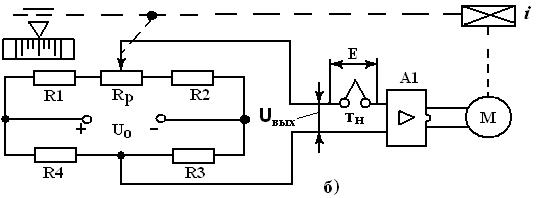
Рис. 1.38
Чувствительный элемент (измерительный преобразователь напряжения) включен последовательно с измерительной диагональю потенциометрической схемы в цепь усилителя А1.
Условия равновесия схемы:
 ,
,
где  - напряжение на выходе мостовой реостатной схемы,
- напряжение на выходе мостовой реостатной схемы,  - напряжение на выходе чувствительного элемента. Напряжение определяется уравнением . С учетом уравнения: S = ∆R/ε,
- напряжение на выходе чувствительного элемента. Напряжение определяется уравнением . С учетом уравнения: S = ∆R/ε,  получим
получим  . Здесь S – чувствительность измерительной схемы, U0 – напряжение источника питания.
. Здесь S – чувствительность измерительной схемы, U0 – напряжение источника питания.
1.5. Состав экспериментальной установки.
В состав экспериментальной установки входят:
- потенциометр, уравновешенный КСП-4 автоматический самопишущий;
- образцовый лабораторный потенциометр ПП-54 (ПП-63).
1.6. Содержание работы.
В процессе подготовки к работе необходимо изучить погрешности и методы измерений, принцип работы и основные соотношения измерительных схем.
В процессе выполнения лабораторной работы необходимо:
- изучить устройство автоматического потенциометра КСП – 4;
- определить чувствительность и цену деления шкалы прибора;
- провести поверку прибора (определить абсолютную, относительную и приведенную относительную погрешности), составить таблицу поправок и построить график зависимости δ=f(x);
- провести анализ результатов измерений и дать заключение о классе точности прибора. Сделать выводы.
1.7. Методика и порядок проведения исследований.
1.7.1. Изучение прибора КСП-4 производить под непосредственным контролем преподавателя или учебного мастера.
1.7.2. Для определения чувствительности S прибора КСП – 4 необходимо с помощью образцового потенциометра задать величину ΔX и снять по шкале прибора КСП - 4 величину ∆ N. Измерения провести на начальном, среднем и конечном участках шкалы. Измерения повторить 5 раз. Полученные данные занести в таблицу 1.1. Вычислить S = ∆ N / ∆ X.
По результатам наблюдений определить среднее значение S для каждого участка шкалы.
Таблица 1.1
|
| Начало шкалы | Середина шкалы | Конец шкалы |
| ΔX |
|
|
|
| ΔN |
|
|
|
| S |
|
|
|
1.7.3. Для определения цены деления шкалы необходимо с помощью образцового потенциометра переместить стрелку указателя прибора КСП-4 на десять делений шкалы прибора. Показания образцового потенциометра разделить на десять и полученное величину ∆U занести в таблицу 1.2. Затем переместить стрелку указателя прибора КСП – 4 еще на десять делений. Из полученного показания образцового потенциометра вычесть предыдущее показание и эту разность снова разделить на десять и т.д. Измерения повторить 5 раз. Определить среднее значение цены деления шкалы прибора.
Таблица 1.2.
| ΔU |
|
|
|
|
|
|
|
1.7.4. Поверка прибора. Абсолютная погрешность ΔX определяется по формуле
∆Х = Х – Хд
путем сравнения показаний X прибора КСП - 4 и показаний Хд образцового потенциометра. . Для поверки приборов со шкалой 0 … 10мВ измерения производить с интервалом 1мВ. Относительная погрешность равна
γ = 100 ∆ Х / Хд ,
а приведенная относительная погрешность равна
δ = 100 ∆ Х / Хш ,
где Хш - диапазон шкалы прибора (10 мВ). Результаты занести в таблицу 1.3.
Таблица 1.3.
| Хд (мВ) | Х | ∆ Х | γ | δ | С 0 |
|
|
1
2
3
4
5
Для перевода действительных значений Хд в градусы использовать таблицу 1.4.
Градуировка термопары хромель-копель (ХК).
Таблица 1.4.
|
|
|
|
|
|
|
|
|
| 6,95 | 16,66 | ||||||
| -10 | -0,64 | 0,65 | 7,69 | 15,48 | |||
| -20 | -1,27 | 1,31 | 8,43 | 16,30 | |||
| -30 | -1,89 | 1,98 | 9,18 | 17,12 | |||
| -40 | -2,50 | 2,66 | 9,93 | 17,95 | |||
| -50 | -3,11 | 3,35 | 10,69 | 18,77 | |||
| -60 | - | 4,05 | 11,46 | 19,60 | |||
| -70 | - | 4,76 | 12,24 | 20,43 | |||
| -80 | - | 5,48 | 13,03 | 21,25 | |||
| -90 | - | 6,21 | 13,84 | 22,03 |


1.8. Отключить лабораторную установку. Доложить преподавателю о выпол-ненной работе и показать результаты измерений.
Контрольные вопросы.
1. Какие погрешности называются систематическими? Как исключить эти погрешности?
2. Как учесть влияние случайных погрешностей и промахов?
3. Что называется абсолютной погрешностью?
4. Как определить относительную погрешность КИП? С какой целью вводится эта погрешность?
5. Запишите выражение для определения приведенной относительной погрешности КИП.
6. Как определить класс точности прибора?
7. Объясните принципы работы индуктивного датчика.
8. Как производят измерения с помощью тензометрических датчиков?
9. На чем основано действие пьезоэлектрических датчиков? Назовите области их применения.
10. Обьясните принцип действия термопар.
11. Объясните принцип работы терморезисторов и термисторов.
12. Что собой представляет биметаллические датчики?
13. Какие датчики используют для преобразования давлений?
- В чем заключается эффект Холла?
- Обьясните принцип работы преобразователя логометрического типа.
- Нарисуйте мостовую измерительную схему. Запишите и объясните условие (уравнение) равновесия.
- С какими датчиками может работать автоматический мост и потенциометр?
- Какие функции выполняют двигатели в мостовой измерительной схеме?
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|